基于Arduino开发板的自动驾驶技术研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
|||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
陈嫣然 |
女 |
组长 |
zp05g03n01 |
||
郑涵语 |
女 |
高一5 |
组员 |
zp05g03n02 |
|
王嘉琪 |
女 |
高一5 |
组员 |
zp05g03n03 |
|
高梦晨 |
女 |
高一5 |
组员 |
zp05g03n04 |
|
汪敬怡 |
女 |
高一5 |
组员 |
zp05g03n05 |
|
指导教师 |
李嘉珞 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 针对自动驾驶技术的核心原理与应用场景,小组成员打算通过三个递进的实验加深对自动驾驶系统感知、决策、控制等环节的理解,并对传感器选型、算法优化及人工智能应用形成深入认识。 主要内容: 实验一、通过制作基于反射式光电传感器的自动循迹小车,掌握硬件搭建与程序调试方法,理解“感知-决策-控制”的基本原理; 实验二、通过对比超声波与红外传感器在不同环境下的防碰撞效果,探究传感器类型对自动驾驶系统性能的影响规律; 实验三、通过利用手机神经网络技术实现人体追踪小车,了解人工智能在目标识别与跟踪中的应用,并探究置信度参数对追踪效果的影响。 |
||||
研 究 假 设 |
1、通过程序迭代优化,小车能够实现稳定循迹行驶。 2、超声波传感器抗环境干扰能力强于红外传感器,红外在白天室外环境下易失效。 3、置信度设置在50%-60%时,人体追踪效果最佳,兼顾灵敏度与抗干扰能力。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于Arduino开发板的自动驾驶技术研究 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:李嘉珞 |
班级:高一5班 |
||
参加活动成员: |
|||
活动内容: 目的(解决什么问题):如何通过硬件搭建、程序优化与参数调试,使智能小车具备稳定循迹、精准避障及人体追踪等基础自动驾驶能力。 形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 过程: ①各自在家进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ① 论:实验一证明程序迭代可显著提升循迹性能,最终实现稳定行驶; 实验二证明超声波传感器抗环境干扰能力优于红外传感器; 实验三得出置信度50%-60%时追踪效果最佳。 ②解决了小组对传感器选型、参数设置等问题的疑惑 ③完成了预定目标和计划。新的问题:红外传感器在室内表现良好但室外完全失效的具体机理尚需进一步探究。 记录者: 陈嫣然 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:基于Arduino开发板的自动驾驶技术研究 |
编号: |
|||
课题组成员 |
组长:陈嫣然 |
组员:郑涵语、王嘉琪、高梦晨、汪敬怡 |
||
指导教师:李嘉珞 |
报告执笔人: 陈嫣然 |
完成时间:9月28日 |
||
(一)书面材料 |
||||
课题成果: 1)预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:经过五次程序迭代,小车最终能够稳定完成全程行驶,平均用时1.90分钟,成功率100%。验证了传感器阈值与转向逻辑的优化是提升性能的关键。。 实验二结果:超声波传感器在所有环境下均表现稳定;红外传感器在白天室外环境下完全失效,在室内环境下表现良好。证明超声波抗环境干扰能力更强。。 实验三结果:置信度30%-40%时追踪灵敏但易受干扰;50%-60%时效果最佳,兼顾灵敏度与抗干扰;70%-80%时抗干扰强但易丢失目标。 |
||||
参考书目及资料:[1] 李岩, 王建国, 刘洋. 基于Arduino的智能小车循迹避障系统设计[J]. 现代电子技术, 2019, 42(15): 122-125. |
||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
||||
(三) 演示课题成果所需要的条件,要求(如特别需要,请说明): |
||||
4、基于Arduino开发板的自动驾驶技术研究
徐州市第一中学高一5班 陈嫣然、郑涵语、王嘉琪、高梦晨、汪敬怡
【摘要】为实现小车在特定跑道上的自动循迹行驶,本研究设计并制作了一套以Arduino UNO R3开发板为核心控制器、反射式光电传感器为感知单元的自动驾驶系统。通过搭建小车硬件平台与模拟跑道,并编写基于传感器信号差动的控制程序,驱动L298N模块对双侧电机进行差速控制。经过多次程序迭代调试,最终实现了小车对预设黑色边界跑道的稳定跟踪。测试结果表明,经过优化的程序可使小车在平均1.90分钟内稳定完成单圈行驶,成功率达100%。该研究验证了基于反射式光电传感器的循迹方案在简易自动驾驶系统中的可行性,为理解自动控制原理提供了实践案例。
【关键词】反射式光电传感器;Arduino;自动循迹;L298N;迭代调试
一、研究背景
自动驾驶技术是未来智慧交通系统的核心,其基本原理在于通过传感器感知环境,经由控制器决策规划,最终通过执行机构控制车辆。近年来,随着嵌入式系统与传感器技术的发展,小型化、低成本的自动驾驶模型为教学与实践提供了良好平台。
反射式光电传感器因其结构简单、成本低廉、检测可靠,常被用于物体识别与路径跟踪等场景。在模型小车应用中,它通过检测跑道与边界颜色的反射率差异来获取位置信息。Arduino开发板具有开源、易用、生态丰富等特点,是初学者实现智能控制的理想选择。
本研究旨在通过集成反射式光电传感器、Arduino开发板与直流电机驱动模块,自主设计与制作一辆能够沿预定黑色边界跑道自动行驶的智能小车。目的在于深入理解“感知-决策-控制”这一自动驾驶核心闭环的执行过程,掌握通过软件算法迭代优化系统性能的基本方法,并探究传感器在自动控制系统中的关键作用。该实践对理解自动控制理论、培养工程思维与动手能力具有重要意义。
二、实验材料
1. 核心控制器与开发模块:Arduino UNO R3开发板(意大利Arduino LLC),L298N电机驱动模块(深圳市德商科技有限公司)。
2. 传感器:反射式光电传感器(型号:RPR220,深圳市奥仕德电子有限公司)。
3. 执行机构与车体:智能小车套装(含直流电机、车轮、亚克力底板、T形板、螺丝螺母,上海鲸鱼机器人有限公司)。
4. 电源系统:充电电池组(7.4 V,深圳市格氏电池有限公司),9V电池(用于Arduino,河南力昂电池有限公司)。
5. 连接与结构材料:公对公、公对母杜邦线(深圳市科星电子有限公司),压舌板(医疗用品),热熔胶及胶枪(浙江慈溪得力集团)。
6. 跑道制作材料:A0白纸(亚太森博有限公司),黑色绝缘胶带(宽1.8 cm,美国3M公司)。
7. 软件与工具:Arduino IDE 1.8.19,电脑(自备),十字螺丝刀(自备),钳子(自备)。
三、研究过程
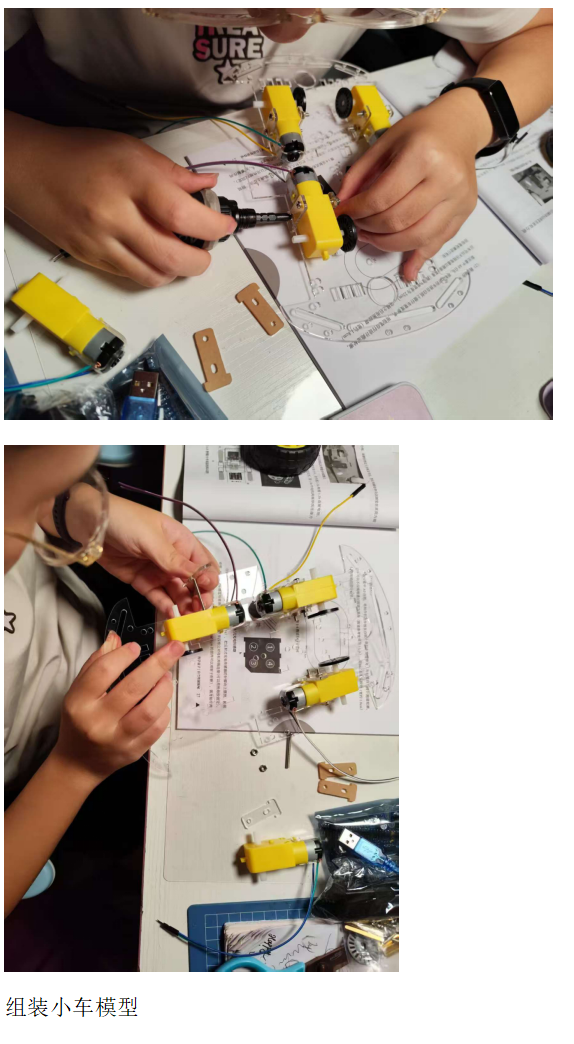
1. 智能小车硬件平台搭建
1.1车体与驱动机构组装
依照设计图纸,使用螺丝、螺母及T形板将两个直流电机固定于亚克力底板上,并安装车轮。随后,将L298N电机驱动板固定在底盘二层。
1.2 电路系统连接
根据电路原理图进行连线。使用杜邦线将左右电机的导线分别接入L298N模块的输出端口(OUT1~OUT4)。将L298N的输入端口(IN1~IN4)连接至Arduino数字引脚5、6、9、10。将两个反射式光电传感器的VCC、GND、OUT引脚分别接入Arduino的5V、GND、模拟引脚A0和A1。
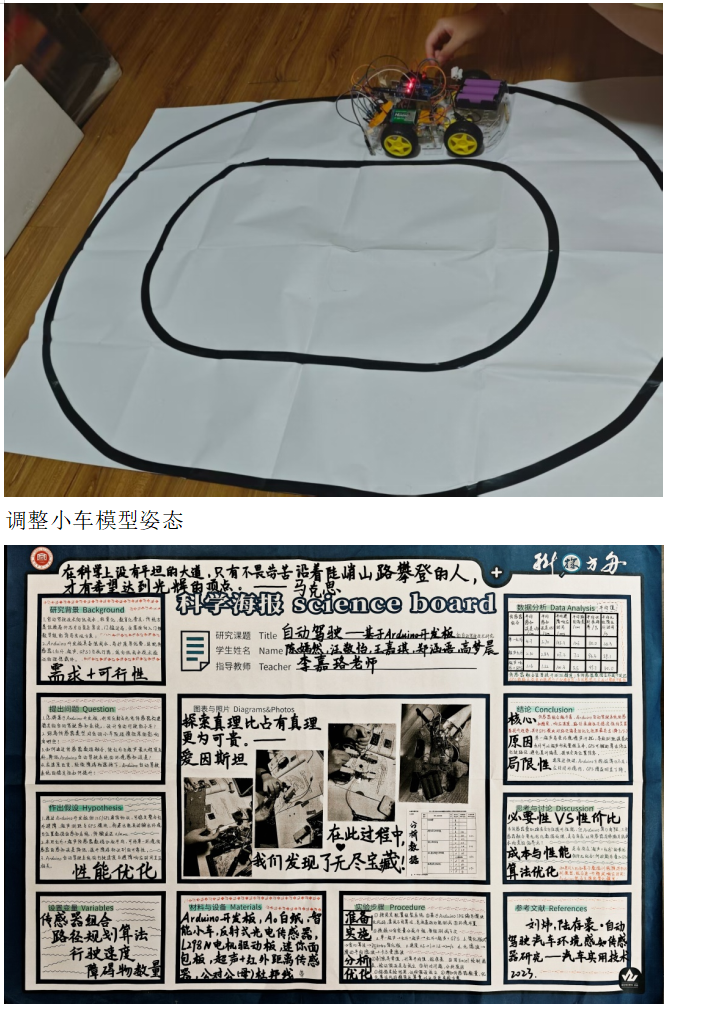
2. 循迹跑道制作
将A0白纸平铺于地面作为跑道基底。以小车宽度为参考,使用铅笔设计一条宽度约为22 cm的闭合环形跑道轮廓。确认路径可行后,使用宽度为1.8 cm的黑色绝缘胶带,紧密沿铅笔轮廓粘贴,形成清晰的跑道边界。
3. 传感器安装与校准
将压舌板用热熔胶粘贴成H形结构。使用透明胶带将两个反射式光电传感器对称地固定在H形结构前端,确保两者离地高度一致。最后,将该结构稳固地安装在小车车头前端的缝隙中。
4. 控制程序设计与迭代调试
4.1 基础程序框架建立
在Arduino IDE中编写程序,使用analogRead() 函数持续读取两个传感器所在模拟引脚(A0, A1)的电压值。通过串口监视器观察传感器在白色跑道区域和黑色胶带区域上的数值差异,据此设定一个初始的阈值用于判断。
4.2 循迹逻辑实现
基于阈值,在程序中使用if 条件语句实现以下基本逻辑:
· 当两侧传感器均未检测到黑线(数值低于阈值)时,控制两侧轮子正转,小车直行。
· 当仅左侧传感器检测到黑线(数值高于阈值)时,控制右侧轮子正转、左侧轮子停止或反转,小车左转。
· 当仅右侧传感器检测到黑线(数值高于阈值)时,控制左侧轮子正转、右侧轮子停止或反转,小车右转。
· 当两侧传感器均检测到黑线时,小车停止。
4.3 程序迭代优化
将初版程序上传至开发板,进行实地测试。观察小车行驶过程中的抖动、偏离或冲出跑道的情况。通过分析串口数据,动态调整传感器判断阈值、转向时的电机速度(通过analogWrite 的PWM值控制)以及转向恢复逻辑。记录每次程序修改的内容与测试结果,共进行了5个版本的迭代优化,直至小车能够平滑、稳定地循迹行驶。
四、结果与分析
通过五次系统的程序迭代优化,小车的循迹性能得到显著提升。最终版本(版本5)程序在三次重复测试中均能成功完成一圈行驶,未发生冲出跑道的情况,成功率达到100%。
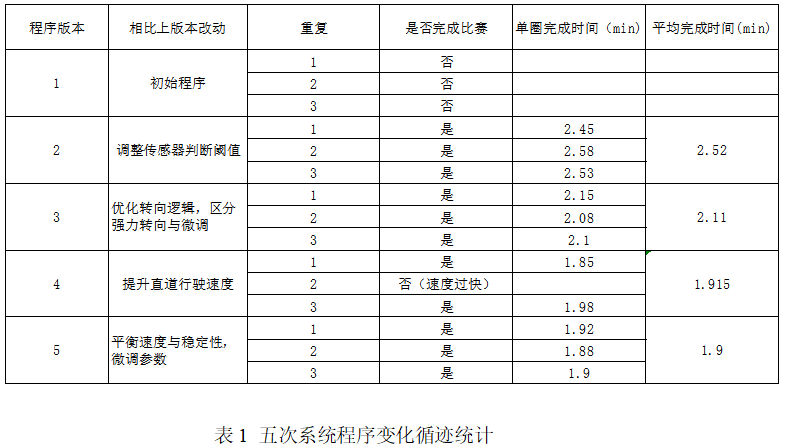
分析表1数据可知:
1. 传感器阈值的准确性是基础。版本2通过校准阈值,使小车首次具备循迹能力,但用时较长,表明控制策略较为粗糙。
2. 控制算法的精细度决定性能。版本3通过细化转向控制,减少了小车在跑道上的左右晃动,行驶路径更平滑,因此平均用时显著缩短(从2.52 min降至2.11 min)。
3. 系统需要在速度与稳定性间取得平衡。版本4试图通过提速来优化成绩,但导致了不稳定因素(一次失败)。版本5在速度与稳定性间找到了更优平衡点,在保证100%成功率的同时,取得了最佳平均成绩(1.90 min)。
上述结果与分析表明,对于本自动循迹系统,硬件是基础,而软件算法的优化是实现稳定、高效运行的关键。迭代调试是解决此类工程问题的有效方法
五、结论
1. 本研究成功设计并实现了一款基于反射式光电传感器的自动循迹小车,验证了“感知-决策-控制”技术路径在模型自动驾驶系统上的有效性。
2. 研究结果表明,反射式光电传感器可用于可靠的路径识别,但系统性能高度依赖于控制程序的精细程度。通过程序迭代优化,特别是对传感器阈值和电机转向逻辑的精细调整,能极大提升小车的循迹稳定性和效率。
3. 本研究为理解自动控制基本原理提供了生动的实践案例,所掌握的硬件集成、软件编程与系统调试方法,可为后续开展更复杂的嵌入式系统或人工智能应用研究奠定基础。
六、参考文献
[1] 李岩, 王建国, 刘洋. 基于Arduino的智能小车循迹避障系统设计[J]. 现代电子技术, 2019, 42(15): 122-125.
[2]刘白, 郭阳, 刘金琨. 基于PID控制的智能车系统设计与实现[J]. 控制工程, 2018, 25(S1): 60-64.
[3]申志远, 熊璐, 冷搏. 无人驾驶智能车底层控制接口设计与实现[J]. 机械与电子, 2017, 35(4): 65-69.
[4]科学盒子项目组. 自动驾驶探秘实验指导手册[Z]. 2023.