基于HC-SR04超声波传感器的微型雷达设计与研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于HC-SR04超声波传感器的微型雷达设计与研究 |
|||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
周一平 |
男 |
高一5 |
组长 |
|
谢昂轩 |
男 |
高一5 |
组员 |
|
王俊皓 |
男 |
高一5 |
组员 |
|
苏柏赫 |
男 |
高一5 |
组员 |
|
高铭泽 |
男 |
高一5 |
组员 |
|
指导教师 |
邵馨阅 |
|||
课 题 研 究 的 目 的 及 主 要 内 容 |
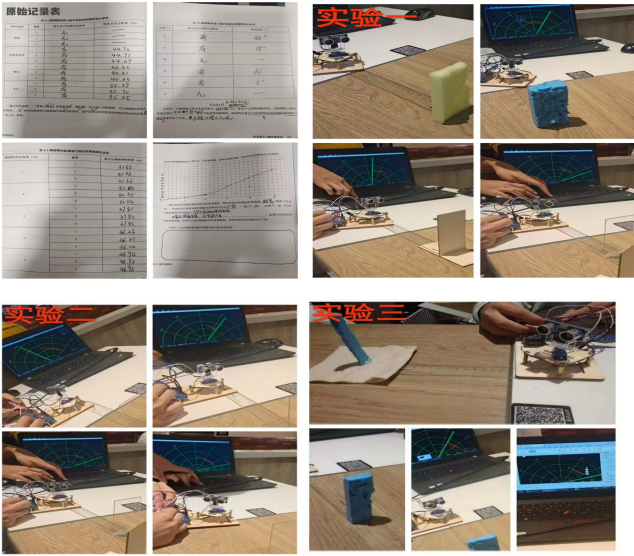
目的: 本文旨在设计与研究基于HC-SR04超声波传感器的微型雷达系统,以探究不同材质、角度及宽度对超声波雷达识别效果的影响。本研究为微型雷达在复杂环境中的应用提供了理论依据和技术支持。 主要内容: 实验一:探究被测物材质对超声波雷达识别效果的影响,为自动驾驶、智能机器人、泊车雷达等场景提供更精准的障碍物判断依据,提升探测可靠性与安全性; 实验二:探究被测物角度对超声波雷达识别效果的影响,明确雷达最佳探测角度与有效探测范围,提升避障、测距的准确性和环境适应性; 实验三:探究被测物宽度对超声波雷达识别效果的影响,能为雷达安装间距、识别阈值与避障策略提供实测依据,提升对窄小/宽大障碍物检测的稳定性与准确率。 |
|||
研 究 假 设 |
所有因素均会对超声波雷达识别产生影响,其中材料,角度因素对超声波雷达识别效果影响较大。 |
|||
研 究 方 法 |
实验、查找资料。 |
|||
研 究 步 骤 (各阶段 的主 要内 容和 时间 安排) |
一 、8月25日-8月29日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月30日-8月31日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、9月1日-9月18日 1. 登录在线学习平台 2. 完成探究性学习讨论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月18日-9月19日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月20日-9月26日 1. 完成通讯稿 2. 完成科学海报 3. 完成答辩PPT 4. 完成论文 5. 完成“我的科研故事”视频 六、9月27日-9月28日 1. 科学海报评选 2. PPT预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
|||
成 果 形 式 |
PPT,论文,科学海报,通讯稿 |
|||
论 证 小 组 意 见 |
经小组论证,《基于HC-SR04超声波传感器的微型雷达设计与研究》实验目标明确、过程规范、数据真实,成果形式完整规范,能够客观反映实验探究过程与结论。小组一致同意该成果按现有形式进行申报与提交。 论证人签名: 谢昂轩 2025年 9月26 日 |
|||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号: |
|
活动时间:9月11日 |
第 1 次 |
活动地点:室内 |
指导教师:邵馨阅 |
班级:高一5班 |
|
参加活动成员: 谢昂轩,王俊皓,周一平,苏柏赫,高铭泽 |
||
活动内容: 1)目的: 实验一:探究被测物材质对超声波雷达识别效果的影响,为自动驾驶、智能机器人、泊车雷达等场景提供更精准的障碍物判断依据,提升探测可靠性与安全性; 2)形式: 实验、查阅资料、小组讨论。 3)过程: ①用裁剪刀将海绵与高密度泡沫裁剪成5×10×1.5cm的立方体,将5×10cm的亚克力塑料板和木板粘成T形装置。 ②将雷达装置摆放到桌上,垫高约5cm,并确保雷达前面,左面和右面有超过40cm的无杂物空间。 ③分别将海绵,高密度泡沫立方体,木头板,亚克力塑料板T形装置放在超声波传感器正前方20cm处。 ④将Arduino开发板连接到电脑上,打开雷达显示面板,观察雷达中检测到的物体位置,测量物体距离雷达距离。 ⑤小组展示、讨论各自的实验及结果。 ⑥查阅资料,形成共识。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:通过实验发现,高密度泡沫塑料板,木头板的障碍物可以被超声波雷达检测到,海绵材料的障碍物不能被超声波雷达检测到,超声波雷达检测能被检测到的物体的距离有差异。 ②完成了预定目标和计划。新的问题:如何探测海绵等不能被超声波雷达检测到的障碍物。 记录者: 谢昂轩 |
||
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号: |
||||
课题组成员 |
组长:周一平 |
组员:谢昂轩,王俊皓,苏柏赫,高铭泽 |
|||
指导教师:邵馨阅 |
报告执笔人:谢昂轩 |
完成时间:9月26日 |
|||
主导课程:超声波雷达 |
相关课程:物理学、信息技术学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:通过实验发现,高密度泡沫塑料板,木头板的障碍物可以被超声波雷达检测到,海绵材料的障碍物不能被超声波雷达检测到,超声波雷达检测能被检测到的物体的距离有差异。 实验二结果:通过实验发现,当障碍物与雷达角度范围为0~15和45~60时,雷达可以探测到障碍物,当障碍物与雷达角度范围为15~45和大于60度时,雷达不能探测到障碍物。障碍物在雷达中被探测到的角宽度和障碍物与雷达角度有如下关系,障碍物在雷达中被探测到的角宽度随障碍物与雷达角度的增大而减小。 实验三结果:通过实验发现,被检测物体的实际宽度越宽,超声波雷达检测到的宽度就越宽,物体的实际宽度和超声波雷达检测到的宽度不一致。 |
|||||
参考书目及资料: [1]樊浩,郑和友. 手持式毫米波雷达发展综述[J]. 科技视界,2024,14(24):76-80. [2]孙宇凤. 基于超声波传感器测距系统关键技术的研究[D]. 西安电子科技大学,2019. [3]常亮亮. 基于激光雷达的车道线检测方法研究[D]. 重庆邮电大学,2019. [4]雷达的历史|Radar History[EB/OL].(2022-07-11)[2025-05-14]. https:/zhuanlan.zhihu.com/p/515574476 [5]‖雷达原理|—第二章雷达的发展历史及性能指标[EB/OL].(2022-02-09)[2025-05-14]. https:/zhuanlan.zhihu.com/p/463372333 [6]雷达基本原理[EB/OL](2021-10-08)[2025-05-14]. https:/zhuanlan.zhihu.com/p/419232221 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录(3)份 调查表( )份 测量数据记录(1)份 |
|||||
(二)演示课题成果所需要的条件,要求: 需要事先搭建好超声波雷达,在电脑上下载雷达显示软件,将程序上传,将Arduino开发板连接在电脑上。 |
|||||
4. 基于HC-SR04超声波传感器的微型雷达设计与研究
徐州市第一中学高一5班 谢昂轩,王俊皓,周一平,苏柏赫,高铭泽
摘要
本文旨在设计与研究基于HC-SR04超声波传感器的微型雷达系统,以探究不同材质、角度及宽度对超声波雷达识别效果的影响。研究通过搭建实验平台,分别对海绵、高密度泡沫、亚克力、塑料板、木板五种材质,0°至75°六个角度及1~5cm宽度进行测试。实验结果表明,材质密度、表面光滑度及物体角度对超声波反射强度有显著影响,而宽度在一定范围内对识别效果影响较小。本研究为微型雷达在复杂环境中的应用提供了理论依据和技术支持。
关键词
HC-SR04超声波传感器;微型雷达;材质识别;角度影响;宽度测试。
引言
随着物联网技术的快速发展,微型雷达因其低成本、高精度和易部署的特点,在智能家居、自动驾驶、工业检测等领域展现出广阔的应用前景。这些微型雷达设备能够无缝集成到各种系统中,为用户提供实时数据和监控能力。例如,在智能家居中,它们可以用来检测房间内的运动,自动调节照明和温度,甚至在紧急情况下发出警报。在自动驾驶汽车中,微型雷达能够帮助车辆感知周围环境,避免碰撞,并在复杂的交通状况中保持安全距离。工业检测方面,它们可以用于监测生产线上的设备运行状态,预防故障和提高生产效率。
然而,实际应用中,被测物体的材质、角度及宽度等因素对超声波雷达的识别效果产生显著影响,导致测量误差增大,限制了其应用范围。例如,在自动驾驶场景中,不同材质的车辆或障碍物可能对雷达波的反射特性产生不同影响,从而影响系统的判断准确性。物体的角度变化也可能导致雷达波的反射路径改变,进而影响测量结果的可靠性。此外,物体的宽度变化同样会对雷达波的覆盖范围和分辨率造成影响。
目前,关于超声波传感器的研究多集中于单一因素对测量精度的影响,而综合考虑材质、角度及宽度等多因素交互作用的研究尚显不足。研究者通常关注于如何提高雷达在特定条件下的性能,但很少有研究能够全面评估在多种因素共同作用下的识别效果。此外,现有研究多采用理论模拟,缺乏实际实验验证,难以准确反映复杂环境下的识别效果。理论模型可能无法完全捕捉到真实世界中的所有变量和干扰因素,因此实验验证是不可或缺的步骤。
本研究旨在通过实验探究不同材质、角度及宽度对超声波雷达识别效果的影响,为微型雷达在复杂环境中的优化设计提供理论依据。通过构建一个包含多种材质样本、不同角度和宽度设置的实验环境,研究团队能够模拟现实世界中的各种情况。实验数据将帮助研究人员理解各种因素如何单独或共同作用于雷达的性能,并识别出影响最大的因素。研究成果将有助于提高微型雷达的测量精度和适应性,推动其在智能家居、自动驾驶等领域的广泛应用。最终,这项研究将为工程师和设计师提供宝贵的指导,帮助他们设计出更加可靠和高效的雷达系统,以满足日益增长的市场需求。
材料
HC-SR04超声波传感器一个,Arduino UNO开发板一条,方口USB数据线一个,杜邦线若干条,SG90舵机一个,透明支架及底座若干,双通六角铜柱若干,螺丝螺母若干,海绵一块、高密度泡沫一块、亚克力塑料板若干片、木板若干片。
方法与步骤
1.探究被测物材质对超声波雷达识别效果的影响:
1.1用裁剪刀将海绵与高密度泡沫裁剪成5×10×1.5cm的立方体,将5×10cm的亚克力塑料板和木板粘成T形装置。
1.2将雷达装置摆放到桌上,垫高约5cm,并确保雷达前面,左面和右面有超过40cm的无杂物空间。
1.3分别将海绵,高密度泡沫立方体,木头板,亚克力塑料板T形装置放在超声波传感器正前方20cm处。
1.4将Arduino开发板连接到电脑上,打开雷达显示面板,观察雷达中检测到的物体位置,测量物体距离雷达距离。
2.探究被测物角度对超声波雷达识别效果的影响:
2.1将雷达装置摆放到桌上垫高约5cm,并保证雷达前面,左面和右面有超过40cm的无杂物空间。
2.2在雷达正前方20cm处摆放一个量角器,将塑料T形板的中点穿过量角器半圆的中心放置。
2.3将Arduino开发板连接到电脑上,打开雷达显示面板,调整梯形板与量角器0~180度边线的夹角α,同时记录雷达显示面板上是否检测到物体,记录雷达检测到的物体位置,并测量物体在雷达中的视角。
3.探究被测物宽度对超声波雷达识别效果的影响:
3.1用裁纸刀将高密度泡沫裁成尺寸分别为1×10×1.5cm,2×10×1.5cm,3×10×1.5cm,4×10×1.5cm,5×10×1.5cm的5个立方体。
3.2将雷达装置摆放到桌上垫高约5cm,并确保雷达前面,左面和右面有超过40cm的无杂物空间。
3.3分别将宽度为1~5cm的高密度泡沫放在超声波雷达前20cm处。
3.4将Arduino开发板连接到电脑上,打开雷达显示面板,记录雷达中检测到的物体,测量物体在雷达显示中的宽度并记录。
结果
材料类型 |
重复 |
雷达是否检测到物体 |
物体至雷达的距离(cm) |
平均距离(cm) |
海绵 |
1 |
否 |
—— |
—— |
2 |
否 |
—— |
||
3 |
否 |
—— |
||
高密度泡沫 |
1 |
是 |
44.72 |
44.71 |
2 |
是 |
44.71 |
||
3 |
是 |
44.69 |
||
塑料 |
1 |
是 |
40.32 |
40.32 |
2 |
是 |
40.31 |
||
3 |
是 |
40.33 |
||
木头 |
1 |
是 |
35.69 |
35.68 |
2 |
是 |
35.70 |
||
3 |
是 |
35.65 |
表1障碍物材质与超声波雷达检测效果记录表
通过实验发现,高密度泡沫塑料板,木头板的障碍物可以被超声波雷达检测到,海绵材料的障碍物不能被超声波雷达检测到,超声波雷达检测能被检测到的物体的距离有差异。
角度( |
雷达是否检测到物体 |
物体视角( |
0 |
是 |
45 |
15 |
是 |
15 |
30 |
否 |
—— |
45 |
是 |
10 |
60 |
是 |
5 |
75 |
否 |
—— |
表2障碍物角度与超声波雷达检测效果记录表
实验中当障碍物与雷达角度范围为0~15和45~60时,雷达可以探测到障碍物,当障碍物与雷达角度范围为15~45和大于60度时,雷达不能探测到障碍物。障碍物在雷达中被探测到的角宽度和障碍物与雷达角度有如下关系,障碍物在雷达中被探测到的角宽度随障碍物与雷达角度的增大而减小。
障碍物实际宽度(cm) |
重复 |
雷达估算障碍物宽度(cm) |
平均宽度(cm) |
1 |
1 |
31.66 |
31.66 |
2 |
31.65 |
||
3 |
31.66 |
||
2 |
1 |
32.04 |
32.05 |
2 |
32.05 |
||
3 |
32.05 |
||
3 |
1 |
37.81 |
37.83 |
2 |
37.82 |
||
3 |
37.83 |
||
4 |
1 |
36.21 |
42.22 |
2 |
42.21 |
||
3 |
42.23 |
||
5 |
1 |
46.94 |
46.94 |
2 |
46.95 |
||
3 |
46.93 |
表3障碍物实际宽度与雷达估算宽度记录表
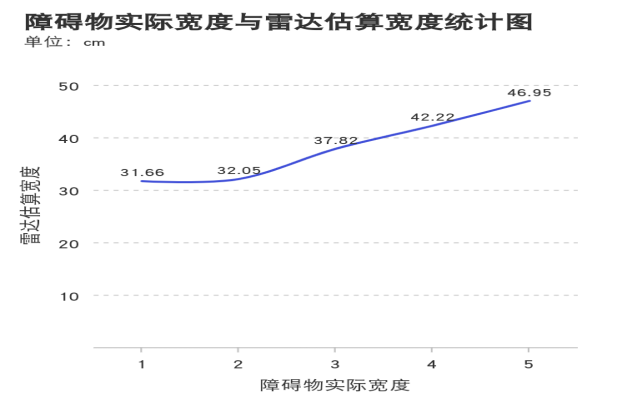
通过实验发现,被检测物体的实际宽度越宽,超声波雷达检测到的宽度就越宽,物体的实际宽度和超声波雷达检测到的宽度不一致。
讨论
本研究通过实验验证了材质、角度及宽度对超声波雷达识别效果的影响。材质密度和表面光滑度是影响雷达检测效果的关键因素,而角度对反射强度的影响更为显著,宽度对,雷达识别效果影响较小,但实际宽度与雷达检测的宽度不一致可能是PPT放缩截屏图片时比例不一致,雷达测距有误差,电路不良等因素导致。
与前人研究相比,本研究综合考虑了多因素交互作用,通过实际实验验证了理论模型的准确性。未来研究可进一步探究不同环境(如湿度、温度)对超声波雷达识别效果的影响,优化传感器设计,提高其适应性和测量精度。
结论
1. 障碍物的材质,角度和宽度对超声波雷达检测效果均有影响。
2. 障碍物不同材质会影响雷达识别效果,材质密度和光滑度均会影响其识别效果。
3. 障碍物不同材质对超声波雷达检测到的物体视角有影响。
4. 障碍物的宽度对雷达影响较小,雷达估算的障碍物宽度随实际宽度的增大而增大。
5. 本研究为微型雷达在复杂环境中的应用提供了理论依据和技术支持。
参考文献
[1]樊浩,郑和友. 手持式毫米波雷达发展综述[J]. 科技视界,2024,14(24):76-80.
[2]孙宇凤. 基于超声波传感器测距系统关键技术的研究[D]. 西安电子科技大学,2019.
[3]常亮亮. 基于激光雷达的车道线检测方法研究[D]. 重庆邮电大学,2019.
[4]雷达的历史|Radar History[EB/OL].(2022-07-11)[2025-05-14].
https:/zhuanlan.zhihu.com/p/515574476
[5]‖雷达原理|—第二章雷达的发展历史及性能指标[EB/OL].(2022-02-09)[2025-05-14].
https:/zhuanlan.zhihu.com/p/463372333
[6]雷达基本原理[EB/OL](2021-10-08)[2025-05-14].
https:/zhuanlan.zhihu.com/p/419232221