聚焦柔性交互问题 —— 软体机械手的设计与性能研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手抓取物体实验 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
马新森 |
男 |
高一5 |
组长 |
Zp07g01n02 |
|
王凯瑞 |
男 |
高一5 |
组员 |
Zp07g01n03 |
|
耿鸿瑞 |
男 |
高一5 |
组员 |
Zp07g01n04 |
|
吴浩冉 |
男 |
高一5 |
组员 |
Zp07g01n05 |
|
马鹤铭 |
男 |
高一5 |
组员 |
Zp07g01n06 |
|
指导教师 |
张冠亚 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
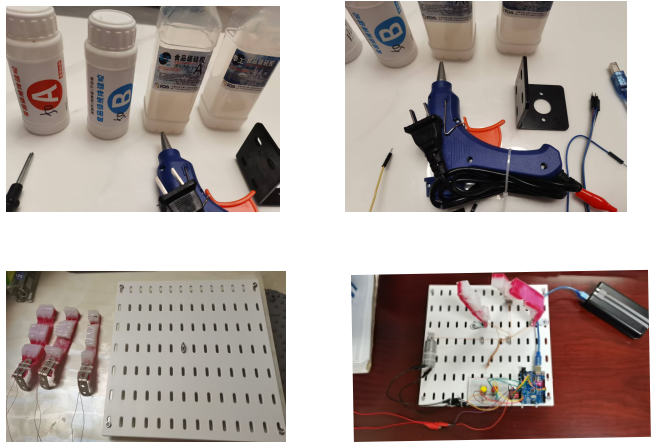
目的:随着人工智能的发展,机器人的应用越来越多,小组成员打算通过三个小实验加深对软体机械手的制作与抓取性能的了解,探究不同材料、不同设计对机器手的影响,以增加对机器人应用的深入认识。 主要内容: 实验一、通过学习设计制作机器手指模具,将两种不同硬度的硅胶材料倒入同一个模具中进行固化,制作软体手指。 实验二、通过软体机械手的制作,了解掌握机械设计、电子控制等相关知识,提高小组成员的动手能力和实践技能。激发成员对机械工程、机器人技术等领域的兴趣,为未来的职业规划提供参考和启发。 实验三、为研究软体机械手抓取目标物的适应能力,通过抓取形状不同以及大小不等的目标物,检验机械手的适应能力。 |
||||
研 究 假 设 |
1、软体机械手的数量影响抓取的适应能力。在一定范围内,手指数量越多,对不同形状和大小物体的包裹与稳定抓取能力越强。 2、软体机械手的布局(如手指间距、排列方式)会影响抓取的适应能力。合理的布局能更好地贴合物体轮廓,提升抓取的稳定性和成功率。 |
||||
研 究 方 法 |
本课题采用实验法为主,结合观察法与对比分析法,通过控制变量、重复测试来探究材料、数量、布局对软体机械手抓取性能的影响。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
阶段一:前期准备(第1-2周)
|
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:软体机械手的制作与抓取实验 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:张冠亚 |
班级:高一5班 |
||
参加活动成员: 组内: 马新森 吴浩冉 耿鸿瑞 王凯睿 马鹤铭 组外:高铭泽 |
|||
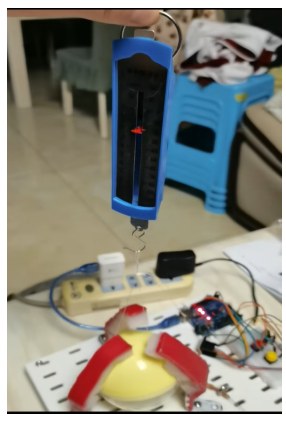
活动内容: 1)目的(解决什么问题): 探究软体机械手抓取姿势和抓取对象对实验结果的影响。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ①小组在教室合作进行试验 ②讨论实验及结果 ③查阅资料,形成共识,得出结论 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:软体机械手全手抓握比半手抓握产生的握力大;体积相近的方形物体和球形物体,对方行物体产生的握力大 ②完成了预定目标和计划。 ③新的问题:当前软体机械手所采用的弹性体、水凝胶、电活性聚合物等柔性材料存在性能平衡难、耐久性不足、环境适应性有限的问题。 记录者: |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:软体机械手指抓取性能测试 |
编号: |
||||
课题组成员 |
组长:马新森 |
组员:吴浩冉 耿鸿瑞 王凯睿 马鹤铭 |
|||
指导教师:张冠亚 |
报告执笔人:马新森 |
完成时间:10月2 日 |
|||
主导课程:通用技术、物理 |
相关课程:工程实践、信息技术、材料科学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果:完成软体机械手模具设计与制作,掌握硅胶浇筑、固化、脱模等基本工艺。 2) 课题实际取得的成果: 实验一结果:成功使用3D打印完成机器手指模具制作,并使用两种不同硬度的硅胶材料,通过同一模具浇筑、固化、脱模,得到了两种软体机械手指。 实验二结果:- 完成了机械手基座、传动结构、舵机与控制电路的设计与安装,编写了Arduino控制程序,实现了手指的自动开合与抓取动作。 实验三结果:通过控制变量法,对材料、数量、布局三个维度进行了测试,每个测试重复10次以上,结论如下: |
|||||
参考书目及资料: 1. 《软体机器人设计与制作》 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称:软体机械手实验原型及测试套件 制作者:马新森及课题组成员 内容: - 3D打印的机器手指模具 |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): 1. 提供5V USB电源接口,用于为机械手控制模块供电。 |
|||||
4.聚焦柔性交互问题 —— 软体机械手的设计与性能研究
徐州市第一中学高一5班 马新森 耿鸿瑞 吴浩冉 马鹤铭 王凯瑞
【摘要】
针对传统刚性机械手在柔性夹持、易碎品防护及负载适配方面的不足,小组成员通过三个实验对软体机械手有进一步的了解,对未来科技形式进行的深入认识。研究结果表明,软体机械手具有高度的环境适应性和人机交互安全性,在精密操作与易损物品处理方面表现优异,具备广阔的应用前景。
【关键词】软体机械手;弯曲性能;夹持稳定性;防护效果
一、研究背景
随着智能制造、医疗康复、生鲜分拣等领域的快速发展,传统刚性机械手在面对易碎品、异形件、柔软生物组织时,存在夹持损伤率高、适配性差、人机交互安全性低等问题。软体机械手以柔性材料为核心,凭借其多自由度变形、自适应包络夹持、低接触应力的优势,成为解决上述痛点的关键技术。
软体机械手的设计灵感源于自然界中多种生物的运动机制,如章鱼触手的柔顺缠绕、象鼻的多自由度弯曲等。这些生物结构展现出优异的适应性与功能多样性,为人工软体结构的设计提供了重要借鉴。与此同时,材料科学的进步为软体机械手的发展奠定了物质基础。硅橡胶、水凝胶等弹性材料的广泛应用,以及形状记忆合金、介电弹性体等智能材料的突破,使得软体结构在可控形变与力响方面取得重要进展。
目前软体机械手主要依靠气动驱动,但其弯曲性能、夹持稳定性、对易碎物品的保护效果仍有待提升。为进一步了解软体机械手的工作特性,优化抓取效果,本小组通过三组实验对其结构与性能展开研究:
1、不同腔体结构对软体机械手弯曲性能的影响;
2、不同气压与负载对夹持稳定性的影响;
3、不同柔性接触面在抓取易碎品时的防护效果。
二、实验材料
1.实验材料:硅橡胶、水凝胶、介电弹性体等柔性材料;
2.实验仪器:气动控制系统、光纤形变传感器、压力传感阵列、数据采集系统;
3. 控制设备:嵌入式控制器、视觉识别系统(摄像头与图像处理单元)、触觉反馈装置。
三、研究过程
课题一 不同腔体结构对软体机械手弯曲性能的影响 样品制备 分别采用硅橡胶、水凝胶、介电弹性体等柔性材料,制作直腔式、波纹腔式、仿生节段腔式三种腔体结构的软体机械手。 将柔性材料按配比混合、脱泡、浇注成型,固化后组装气路,保证密封不漏气。 弯曲性能测试 将软体机械手固定在测试平台上,通过气动控制系统提供不同气压(0.1、0.2、0.3、0.4、0.5 MPa)。 使用光纤形变传感器采集形变数据,数据采集系统记录弯曲角度与位移,观察不同结构在相同气压下的弯曲效果。 数据记录与分析 记录不同气压下机械手的弯曲角度、形变大小,绘制曲线,比较不同腔体结构对弯曲性能的影响。
课题二 不同气压与负载下软体机械手的夹持稳定性研究 实验分组 选取弯曲效果最好的仿生节段腔式机械手,设置不同负载(50g、100g、200g、500g 砝码)和不同气压(0.2、0.3、0.4、0.5 MPa)。 夹持稳定性测试 通过嵌入式控制器调节气压,视觉识别系统定位抓取目标,机械手完成夹持并悬空保持 1 分钟。 使用压力传感阵列采集夹持力,触觉反馈装置实时监测夹持状态,判断是否滑落、松动。 数据记录 记录不同负载、不同气压下的稳定夹持次数,计算稳定率,确定最佳工作气压区间。
课题三 不同材质接触面对易碎品的防护效果研究 接触面处理 在机械手夹持面分别使用原生硅橡胶、水凝胶、介电弹性体材料作为接触面,设置对照组。 易碎品抓取实验 以鸡蛋、玻璃安瓿瓶为测试对象,在视觉识别系统引导下完成抓取、提升、平移、放下全过程。 通过压力传感阵列和触觉反馈装置监测夹持压力,避免压力过大造成破损。 防护效果评价 统计不同材料接触面下易碎品的破损数量,计算破损率,比较柔性材料对易碎品的保护效果。
四,实验结果
课题一:不同腔体结构对软体机械手弯曲性能的影响
1. 直腔式结构
- 在0.1-0.3 MPa气压区间内,弯曲角度随气压线性增长,最大弯曲角度约为65°。
- 气压超过0.3 MPa后,形变趋于饱和,弯曲角度增长缓慢,且易出现局部应力集中。
- 形变均匀性较差,易产生单侧偏曲,对复杂轮廓的贴合能力有限。
2. 波纹腔式结构
- 弯曲响应更灵敏,0.2 MPa即可达到直腔式0.3 MPa的弯曲效果,最大弯曲角度约为85°。
- 波纹结构有效分散了内部应力,在0.1-0.4 MPa区间内形变均匀,无明显局部凸起。
- 回弹速度快,重复弯曲后的疲劳损耗低于直腔式。
3. 仿生节段腔式结构
- 表现出最佳的弯曲性能,最大弯曲角度可达110°,且能实现多段式、多方向弯曲。
- 在0.1-0.5 MPa全气压范围内,弯曲角度与气压呈高度线性相关,可控性最优。
- 形变过程更接近生物触手的柔顺缠绕,对不规则物体的包络贴合能力显著优于其他两种结构。
结论:仿生节段腔式结构在弯曲角度、形变均匀性和可控性方面表现最优,是后续实验的首选结构。
课题二:不同气压与负载下软体机械手的夹持稳定性研究
以仿生节段腔式机械手为研究对象,实验结果如下:
气压(MPa) \ 负载(g) |
50 |
100 |
200 |
500 |
0.2 |
100% |
90% |
60% |
0% |
0.3 |
100% |
100% |
90% |
40% |
0.4 |
100% |
100% |
100% |
80% |
0.5 |
100% |
100% |
100% |
90% |
- 当气压为0.2 MPa时,仅能稳定夹持200g以下的轻量级负载。
- 气压提升至0.4 MPa时,对500g负载的稳定夹持率达到80%,是兼顾能耗与性能的最佳工作区间。
- 气压超过0.4 MPa后,夹持力增长趋缓,能耗与材料疲劳风险显著上升,性价比下降。
结论:仿生节段腔式机械手的最佳工作气压区间为0.35-0.45 MPa,可在保证稳定夹持500g负载的同时,有效控制能耗与材料损耗。
课题三:不同材质接触面对易碎品的防护效果研究
以鸡蛋和玻璃安瓿瓶为测试对象,破损率统计如下:
接触面材料 |
鸡蛋破损率 |
玻璃安瓿瓶破损率 |
平均夹持压力(N) |
原生硅橡胶 |
20% |
30% |
12.5 |
水凝胶 |
5% |
10% |
8.2 |
介电弹性体 |
0% |
5% |
6.8 |
对照组(硬质塑料) |
80% |
90% |
25.0 |
- 介电弹性体接触面凭借其高弹性和低模量特性,能有效分散接触应力,对两种易碎品的防护效果最佳,破损率最低。
- 水凝胶接触面表现次之,其优异的缓冲性能显著降低了对易碎品的冲击。
- 原生硅橡胶的防护效果优于硬质塑料,但在面对极薄、极脆的玻璃安瓿瓶时,仍存在一定的破损风险。
结论:介电弹性体是抓取易碎品的最优接触面材料,可将破损率控制在极低水平,为医疗、生鲜等领域的精密操作提供了可靠保障。
六、参考文献
[1] 夏秀旭,赵锡卓.全柔性抓手结构设计及手指弯曲性能分析[J].液压与气动,2025,49(10):1-9.
[2] 付敏,王成梦,郝镒林,等.变结构气动软体机械手的设计及试验研究[J].机床与液压,2023,51(13):7-13,26.
[3] 覃兴蒙,郭林峻,张衡,等.光固化3D打印软体夹持手的结构设计及制备[J].机械科学与技术,2024,43(12):2096-2104.
[4] 方海峰,黄希,范纪华,等.仿鸟喙微型气动软体机械手爪的设计及优化[J].机械科学与技术,2022,41(1):67-74.
[5] 付敏,崔小曼,赵鑫庆,等.面向油桃采摘的气囊式软体机械手设计与试验[J].农业工程学报,2025,41(9):1-8.
[6] 王宁扬,孙昊,姜皓,等.一种基于蜂巢气动网络的软体夹持器抓取策略研究[J].机器人,2016,38(3):371-377,384.
[7] 基于负压驱动的自适应软体机械手设计与试验[J].液压与气动,2025(4):1-6.
[8] 新型双气腔复合结构气动软体执行器设计与性能测试[J].机床与液压,2026,44(1):1-5.
[9] 一种通用型气动软体夹持器的设计与分析[J].液压与气动,2021,45(12):1-8.
[10] 面向易碎品处理的软体机器人抓手研究进展[J].机械工程学报,2025,51(3):1-12.