基于HC-SR超声波传感器的微型雷达设计与研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于HC-SR超声波传感器的微型雷达设计与研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
周天茹 |
女 |
高一5 |
组长 |
zp06g02n01 |
|
殷菲儿 |
女 |
高一5 |
组员 |
zp06g02n02 |
|
孔海博 |
女 |
高一5 |
组员 |
zp06g02n03 |
|
张华姿 |
女 |
高一5 |
组员 |
zp06g02n04 |
|
周钰轩 |
女 |
高一5 |
组员 |
zp06g02n05 |
|
指导教师 |
尹亚楠 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 针对雷达的应用问题,小组成员打算通过三个小实验加深对超声波雷达的了解,对目前国家对雷达的开发应用有深入认识。 主要内容: 实验一、通过研究材料种类与被测物宽度等对雷达识别效果的影响,强化对超声波雷达探测的理解 实验二、通过联合多超声波雷达并编程对障碍物实际方位进行指示,增强对超声波雷达探究的兴趣,并对探究方法有一定认识 实验三、通过探究多障碍物情况下对超声波雷达识别效果的影响,了解总结超声波雷达对于障碍物检测的选择性 |
||||
研 究 假 设 |
1、在雷达检测范围内,宽度大,孔隙少的材料更易被探测。 2、多障碍物情况下雷达对障碍物的指示具有选择性,宽度大的优先指示。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于HC-SR超声波传感器的微型雷达设计与研究 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:尹亚楠 |
班级:高一5班 |
||
参加活动成员: 组内: 周天茹,周钰轩,孔海博,殷菲儿,张华姿 组外:无 |
|||
活动内容: 1)目的: 探究多障碍物情况下,超声波雷达更容易识别出哪种障碍物 2)形式: 实验、查阅资料、小组讨论。 3)过程: ①进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 4)结果: ①完成了预定目标和计划。 ②得到结论:多障碍物情况下,三角测距范围内,障碍物宽度越宽,越易被三角测距器指示 ③出现新问题:多超声波雷达联合对物质的识别仍受被测物本身性质影响 记录者: 周天茹 |
|||
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 基于HC-SR超声波传感器的微型雷达设计与研究 |
编号: |
||||
课题组成员 |
组长:周天茹 |
组员:周钰轩,孔海博,殷菲儿,张华姿 |
|||
指导教师:尹亚楠 |
报告执笔人: 周天茹 |
完成时间:9月28日 |
|||
主导课程:超声波雷达 |
相关课程:编程 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:在相同条件下: 材料方面:高密度泡沫,木板,亚克力板都易被检测,而海绵无法被检测; 宽度方面:被测物显示的次数5cm障碍物>3cm>1cm 由此可知,被测物表面孔隙越少,宽度越大,越易被检测 实验二结果:将两个超声波雷达联合起来,利用三角测距法可以较准确地指示障碍物方位。 实验三结果:通过实验可发现在多障碍物情况下,超声波雷达对于障碍物的指示具有选择性,具体表现为:不同宽度高密度泡沫同时被检测时,指针总是指向宽度更大的障碍物,这说明在多障碍物时雷达优先指示宽度大的障碍物。 |
|||||
参考书目及资料: 1.樊浩,郑和友。手持式毫米波雷达发展综述[J]科技视界,2024,14(24):76-80. 2.孙宇凤。基于超声波传感器测距系统关键技术的研究[D]。西安电子科技大学,2019. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4.基于HC-SR超声波传感器的微型雷达设计与研究
徐州市第一中学高一5班 周天茹,周钰轩,孔海博,殷菲儿,张华姿
【摘要】 关于超声波雷达,我们早有耳闻,这项从上上个世纪就开始登场的科技到现在已有了巨大飞跃,为了更进一步去了解和理解其应用,促进思考与创新发展,我们对于超声波雷达进行了探究
【关键词】 超声波雷达,多障碍物,相控阵
一、研究背景
1864年,英国物理学家 麦克斯韦 预言了电磁波的存在。1886年,德国物理学家 赫兹 通过实验证实了电磁波可以被发射、接收和反射。 这些看似基础的科学探索,为雷达的诞生埋下了伏笔。直到1903年,德国工程师 威尔斯姆耶 才研制出第一个用于船舶防撞的原始雷达装置,但因探测距离太短未受重视。
雷达技术的真正爆发,源于第二次世界大战的需求。
1922年,意大利科学家 马可尼 提出用无线电波探测物体,同年美国海军实验室也成功探测到木船。
1935年,英国物理学家 沃森·瓦特 团队成功开发出第一部实用雷达1937年,英国建成“本土链”(Chain Home)雷达网,在 不列颠空战中,它提前预警了德军空袭,成为扭转战局的关键。
1940年,英国科学家 兰德尔和 布特 发明 空腔磁控管 ,解决了微波源问题,使雷达进入更精准的微波时代。
二战后,雷达技术从军事走向民用,开启了更广阔的应用场景。
21世纪,中国在 氮化镓 、有源相控阵 、反隐身 等技术上取得突破,构建了覆盖广泛的超视距雷达网,实现了从追赶到领跑的跨越。
如今雷达技术正朝着更高精度、更智能化的方向发展。出现了相控阵雷达,激光雷达 ,量子雷达等等。
二、实验材料
Arduino 开发板、方口数据线、SG90 舵机、HC-SR04超声波传感器、亚克力塑料板、卷尺、热熔胶棒、热熔胶枪、杜邦线,螺丝刀、透明胶带,高密度泡沫,记号笔,裁纸刀。

三、研究过程
课题一、被测物材质,宽度对雷达识别的影响
具体步骤:
1、雷达准备
1.1硬件组装。
1.2软件编辑。
2、对不同材料的物体进行检测
2.1用裁纸刀将海绵与高密度泡沫裁成1.5×5×10cm的立方体。
2.2将5×10cm的亚克力板与木板粘成T形装置。
2.3将雷达装置摆放到桌上,垫高约5cm,并确保雷达前面,左面和右面有超过40cm的无杂物空间。
2.4分别将海绵,高密度泡沫立方体,木头板,亚克力塑料板t型装置放在超声波传感器正前方20cm处,将Arduino开发板连接到电脑上,打开雷达显示面板,观察是否检测到物体,截图记录雷达中检测到的物体位置,测量物体距离雷达距离。
2.5距离测量:
将雷达图截图放在PPT (Power Point)中,将图片左右两边缘裁剪至雷达图中40cm半圆处,在格式中将图片的宽度调整为20cm。
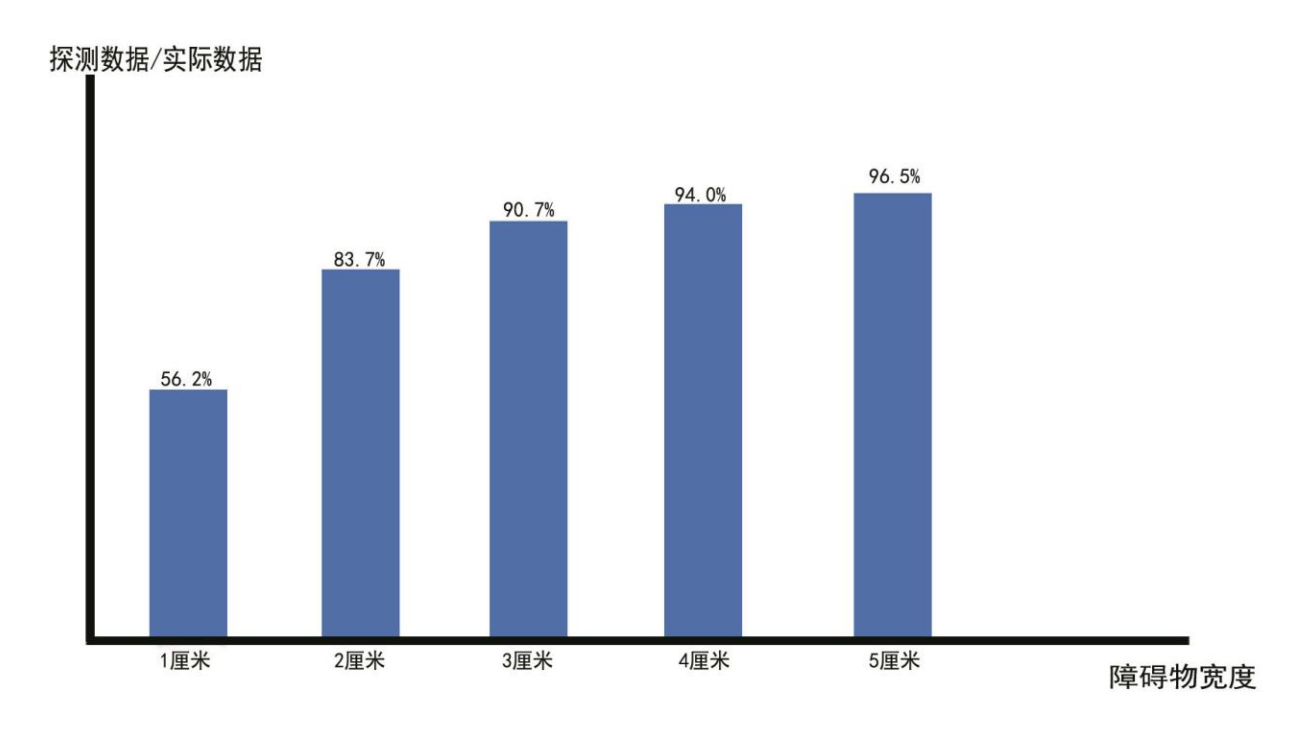
3、探究被测物宽度对超声波雷达的识别效果的影响
3.1将雷达装置摆放到桌上,垫高约5cm,并确保雷达前面,左面和右面有超过40cm的无杂物空间。
3.2用裁纸刀将高密度泡沫裁成尺寸分别为1*10*1.5cm,2*10*1.5cm,3*10*1.5cm,4*10*1.5cm的四个立方体。
3.3分别将宽度为1-5cm的高密度泡沫放在超声波雷达前20cm处。
3.4将Arduino开发板连接到电脑上,打开雷达显示面板,截图记录雷达中检测到的物体,参考课题二中第(5)步的方法测量物体在雷达显示中的宽度并记录与实际宽度差距越小,表明越易被识别。
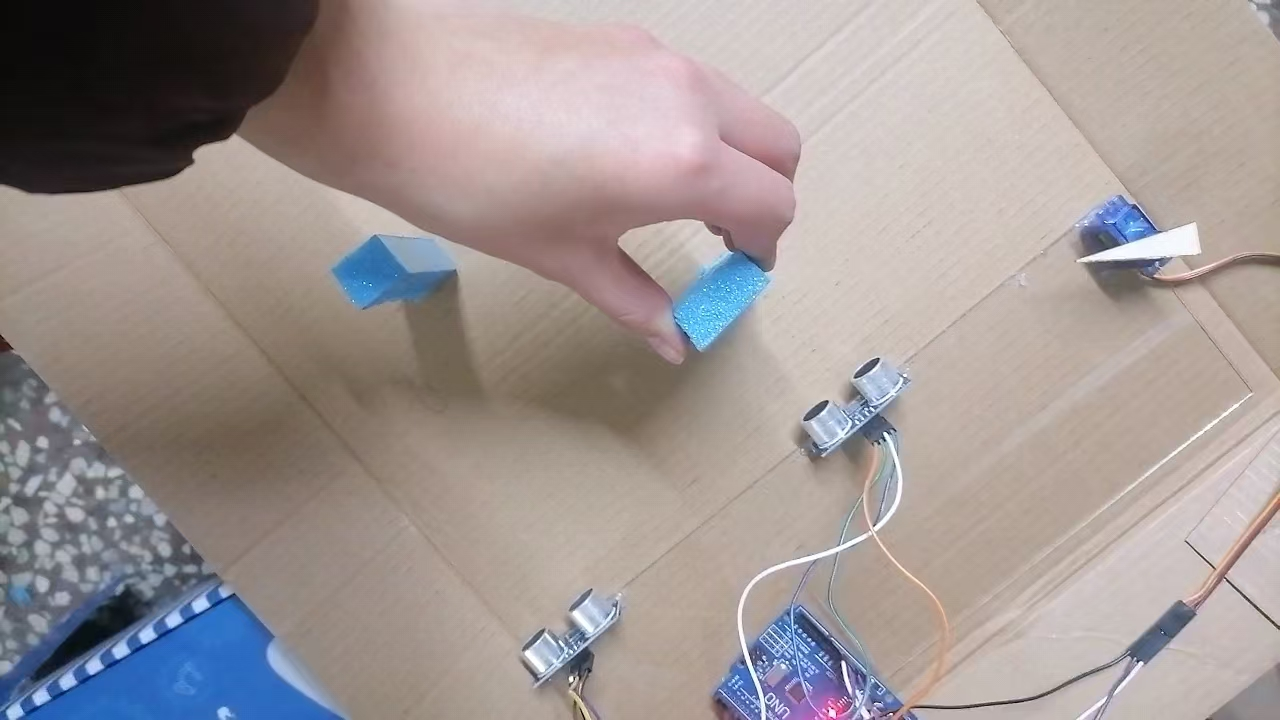
课题二、基于三角测距法的障碍物指示装置制作
1、1.1标定舵机指示的方向。
1.2准备一个长至少20cm的塑料板,参考手册将两个超声波传感器,和舵机粘贴到塑料板上,并测量彼此之间的距离。
1.3按照指示重新连接电路。
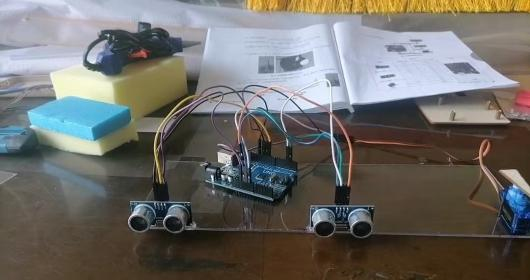
1.4设计Arduino程序。
2、调试雷达
将障碍物放至不同位置,调节指针,完善程序,重复至雷达指示效果良好
经过4次改良后雷达运行良好,能准确指示障碍物方位。
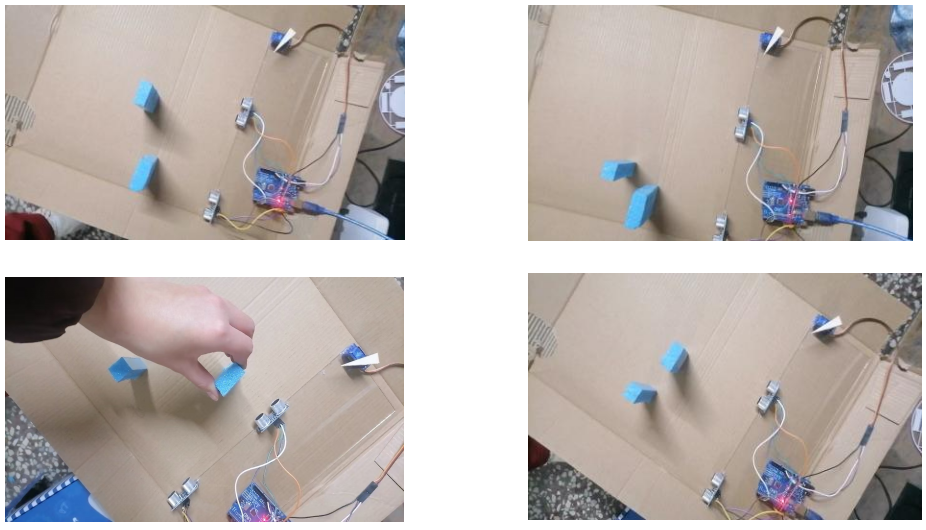
课题三、探究多障碍物情况下雷达指示装置的运行效果
1、将雷达装置摆放到桌上,并确保雷达前面,左面和右面有超过40cm的无杂物空间。
2、在雷达前方放置一张卡纸,分别用3cm,4cm,5cm的高密度泡沫单独测出最佳检测点,用记号笔标记。
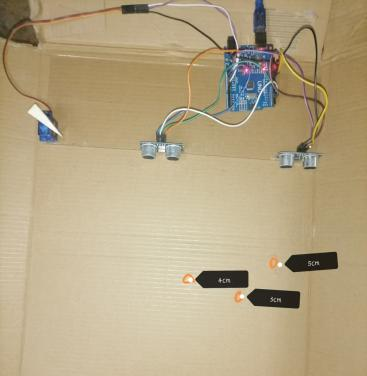
3、实验
3.1同时将3块高密度泡沫放置在其各自最佳检测点上,连接雷达装置进行指示,观察到指针晃动几下后指向5cm障碍物。
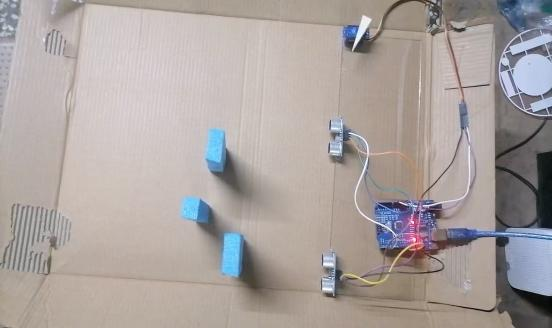
3.2我们尝试去移动5cm障碍物,发现指针跟随其方向转动。
3.3随机撤掉三块障碍物中的一个,实验过程如图所示,发现指针最后总会指向较宽的物体。
四、结果与分析
课题一结果:通过课题一实验,我们看出①海绵等物体不易被超声波雷达探测到,而亚克力板、木板等能够被轻易探测到。
② 宽度较大的物体探测数据与实际数据差距较小,更容易被识别。
由此可知:表面平滑、宽度较大的物体容易被探测到 。
障碍物指示装置改良记录表
第一版 |
第一次改良 |
第二次改良 |
第三次改良 |
|
能否准确指示障碍物 |
否 |
否 |
能 |
能 |
能 |
能 |
能 |
能 |
|
能 |
否 |
否 |
能 |
|
否 |
能 |
能 |
能 |
课题二结果:障碍物指示装置的制作与改良,表明我们可以将多超声波雷达联合起来,使其能够不借助雷达显示屏,更直观、准确地指示障碍物方位。
(在这里,我们联想到,这在生活中我们或许可以用这种装置去探测海底或洞穴,然而这种装置有无缺陷和功能受限呢?)
课题三结果:
通过实验可发现在多障碍物情况下,超声波雷达对于障碍物的指示具有选择性,具体表现为:不同宽度高密度泡沫同时被检测时,指针总是指向宽度更大的障碍物,这说明在多障碍物时雷达优先指示宽度大的障碍物。
由此可见,即使多超声波雷达联合使得其对障碍物的指示功能效率提高,但仍遵循单个超声波雷达的探测规律。实验中的指示装置如同小型的相控阵雷达,会受到障碍物本身性质的影响。
五、结论
课题一实验结论:表面平滑、宽度较大的物体容易被探测到 。
课题二实验结论:多超声波雷达联合能够直观指示障碍物方位。
课题三实验结论:通过实验可发现在多障碍物情况下,超声波雷达对于障碍物的指示具有选择性,仍然遵循单个超声波雷达的探测规律。
基于上述实验结论,我们查找资料,发现在三角测距法基础上建立的障碍物指示装置还受到量程、基绒空间、物体表面等各种因素影响。
与相控阵同样利用“几何角度关系”测算距离和方向,它无法进行大范围和长距离的“扫荡”,但是它近距离、高精度的优势,可以应用到扫地机器人避障、倒车警示等方面。
联想到多地经受雾霾天气,除了环境治理,可以利用雷达指示装置不受烟雾光线影响的特点,为行路人指示避障,保证安全。
六、参考文献
1、樊浩,郑和友。手持式毫米波雷达发展综述[J]科技视界,2024,14(24):76-80.
2、孙宇凤。基于超声波传感器测距系统关键技术的研究[D]。西安电子科技大学,2019
.
