基于HC-SR04超声波传感器的微型雷达设计与研究
超声波雷达
基于HC-SR04超声波传感器的微型雷达设计与研究
组长:王欣悦
指导教师:王晨晨
学校:徐州市第一中学
日期:2026.2.24
基于HC-SR04超声波传感器的微型雷达设计与研究
徐州市第一中学 王欣悦
指导教师:王晨晨
【摘要】本研究利用基于Arduino平台的超声波雷达扫描系统,系统性地探究了目标物体的材质、入射角度及宽度对超声波回波信号强度及探测稳定性的影响。实验设置了亚克力板、海绵、厚泡沫板及木板四种材质,15°至75°五种入射角度,以及1厘米至4厘米四种宽度的目标物。研究结果表明:材质表面硬度与密度越高(如亚克力板、木板),其声阻抗与空气差异越大,回波信号越强,成像越清晰;入射角度的增大会导致镜面反射效应增强,使回波信号急剧衰减,探测误差增大;目标物宽度需大于超声波波束的覆盖范围方能被稳定识别。
【关键词】超声波雷达;Arduino;材质反射;入射角度;波束宽度;声阻抗
1. 引言
超声波雷达(或称超声波传感器)作为一种非接触式的测距与探测技术,因其成本低廉、结构简单、不受光线影响等优点,被广泛应用于机器人避障、汽车倒车雷达、工业自动化及液位测量等领域。其工作原理是向外界发射一束频率高于20kHz的超声波,并接收从目标物体反射回来的回波,通过计算发射与接收的时间差来实现距离测量。
然而,超声波雷达的探测性能并非一成不变,它受到目标物体物理特性的显著影响。在实际应用中,不同材质、不同摆放角度以及不同尺寸的目标物会导致探测距离和成像精度的巨大差异。目前,多数开源项目仅关注其基本测距功能,而对影响其探测性能的多因素系统性研究尚不充分。
本研究基于徐州一中“科探方舟”项目,旨在通过自主搭建的Arduino超声波雷达扫描平台,定量与定性相结合地分析目标材质、超声波入射角度及目标宽度三个关键变量对探测结果的影响。我们期望通过严谨的实验数据与科学的理论分析,揭示其内在物理规律。
2. 实验方法与装置
2.1 实验系统搭建
本实验系统主要由以下部分组成:
1. 硬件部分: Arduino Uno微控制器作为核心处理单元,HC-SR04超声波传感器作为探测单元,SG90舵机用于实现传感器0-180°的水平扫描,以及用于固定和支撑的机械结构。
2. 软件部分:使用Arduino IDE编写控制代码,实现舵机角度控制、超声波测距数据采集,并通过串口通信将数据实时传输至上位机(PC)。在上位机使用Processing编写的程序,将极坐标下的距离-角度数据实时转换为二维平面雷达扫描图像。
2.2 实验设计与变量控制
实验在安静、无强气流干扰的室内环境中进行,以排除环境温湿度对声速的影响(默认声速为340m/s)。所有实验均保持传感器与目标物的初始距离为固定值(如20cm)。
材质实验:选用四种典型材料:
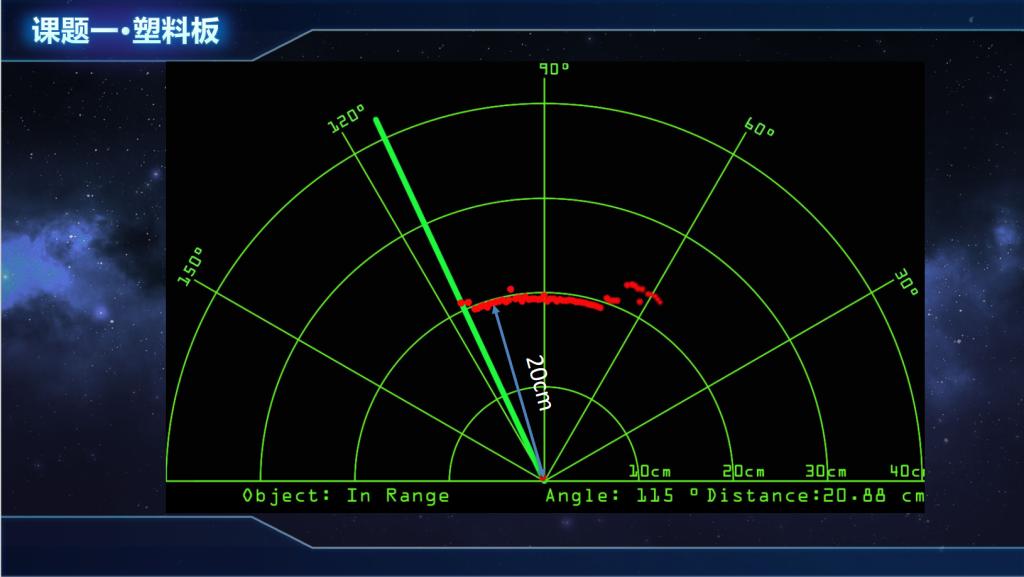
亚克力板:坚硬、表面光滑、密度高。
木板:坚硬但表面有一定粗糙度、密度较高。
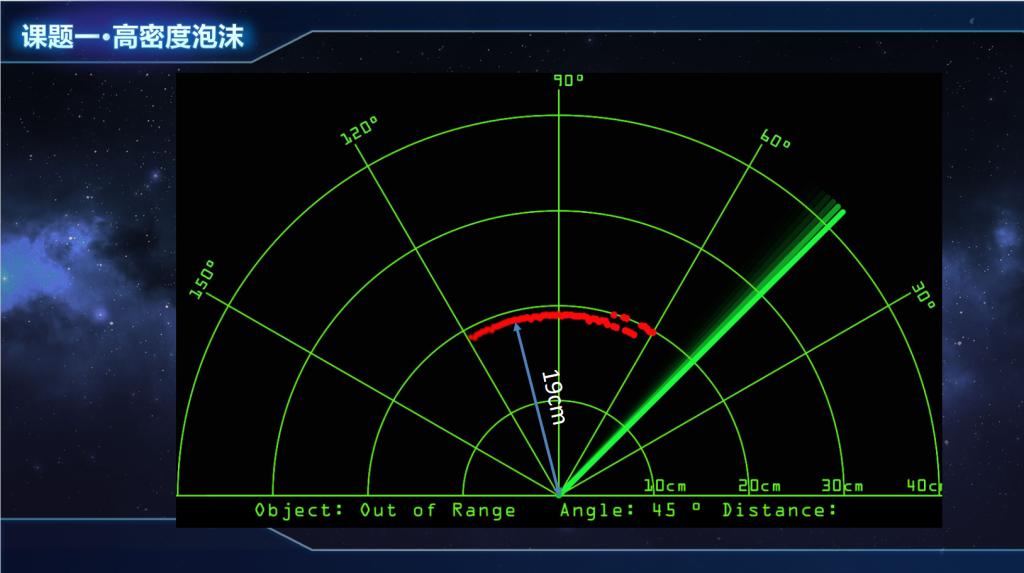
厚泡沫板: 柔软、多孔、密度低。
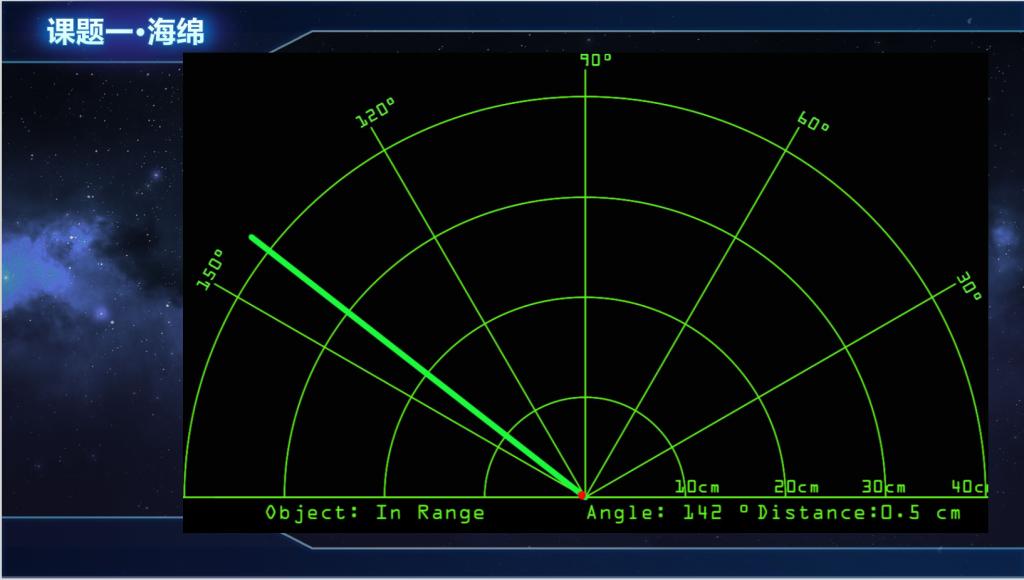
海绵:极其柔软、多孔、弹性好、密度极低。
将上述材料制成1×5×10(单位:cm)超声波束(入射角为0°)放置进行探测。
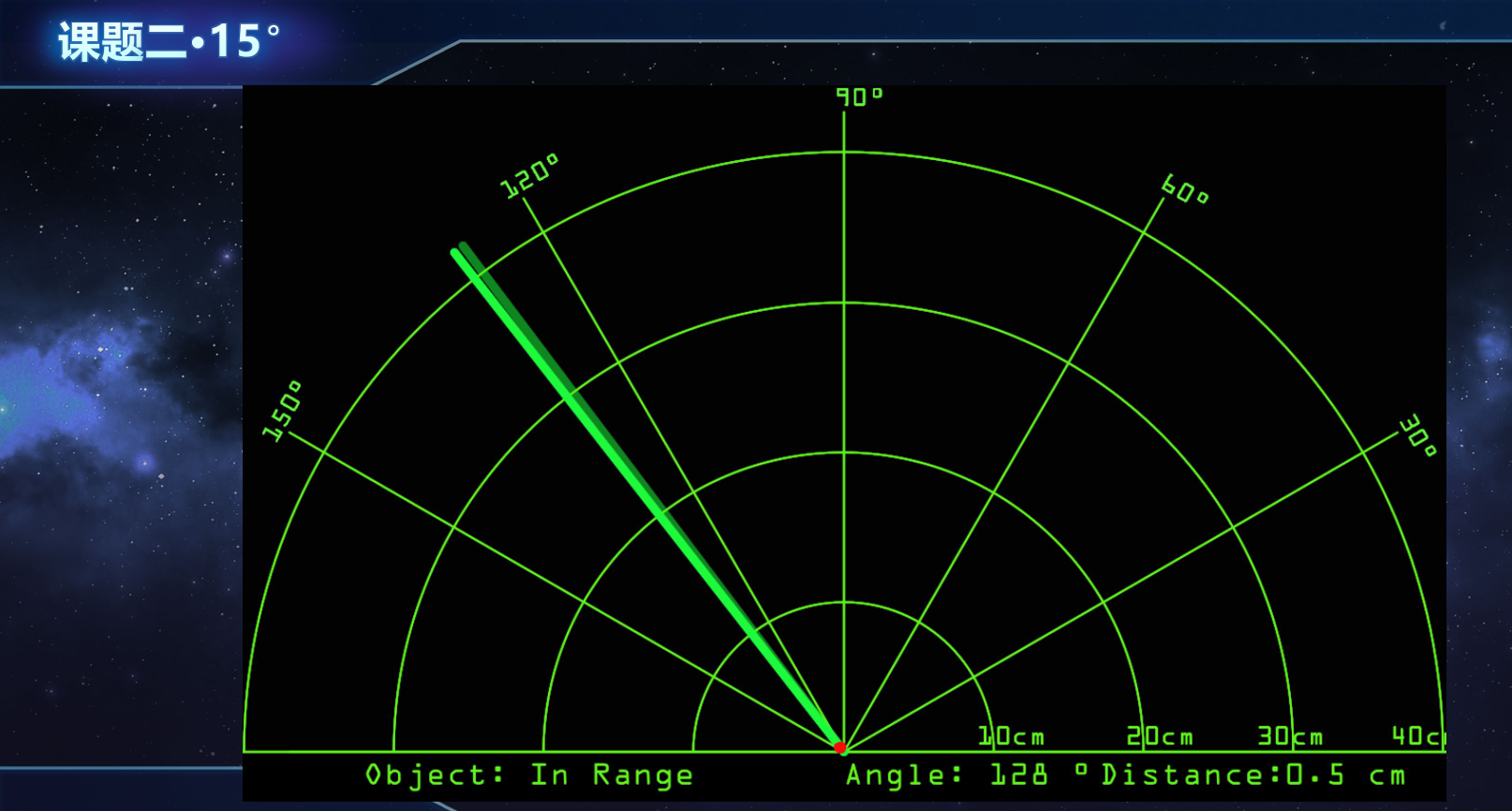
角度实验:亚克力板作为标准目标物,改变其与超声波入射方向的夹角,分别为15°、30°、45°、60°、75°。
宽度实验:选用亚克力板制成不同宽度的条状物(1cm, 2cm, 3cm, 4cm),垂直于波束放置,探究可被稳定探测的最小宽度。
2.3 数据采集
对于每组实验,记录雷达扫描生成的图像特征,并定量记录传感器返回的原始距离数据及其稳定性(如多次测量的标准差)。
3. 结果与讨论
3.1 不同材质对超声波探测的影响
观测结果:
1. 亚克力板和木板在雷达图像上呈现出清晰、锐利的轮廓,测距数据稳定、准确。
2. 厚泡沫板的图像轮廓较为模糊,且测得的距离值存在轻微波动,偶尔会出现探测失败(无回波)。
3. 海绵几乎无法形成有效的雷达图像,轮廓极其模糊甚至无法识别,测距数据极不稳定,大部分信号丢失。
科学分析与推论:
此现象可由声阻抗(Acoustic Impedance)理论完美解释。声阻抗(Z)是介质密度(ρ)与声速(c)的乘积(Z = ρ·c),它决定了声波在介质界面上的反射和透射行为。空气的声阻抗极低(约400 Pa·s/m³),而固体材料的声阻抗远高于此。
高反射率材料(亚克力板、木板): 这些材料密度高、结构致密,其声阻抗与空气差异巨大。当超声波到达其表面时,绝大部分能量被反射回传感器,因此回波信号强,信噪比高。
低反射率材料(厚泡沫板、海绵):这些材料为多孔弹性体。一方面,其本身的声阻抗较低,与空气的差异相对较小;另一方面,更重要的是,声波会进入材料内部错综复杂的微小孔洞,在其中经过多次反射、散射和吸收,最终转化为热能而耗散掉。能够返回传感器的能量微乎其微,导致回波信号极其微弱,甚至无法触发接收电路。海绵在此效应上表现得尤为突出。
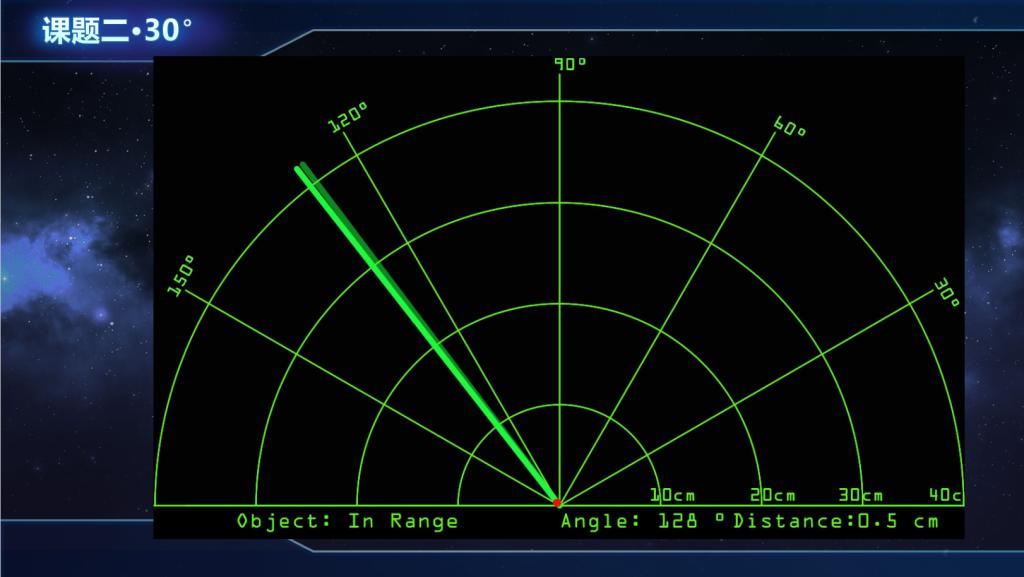
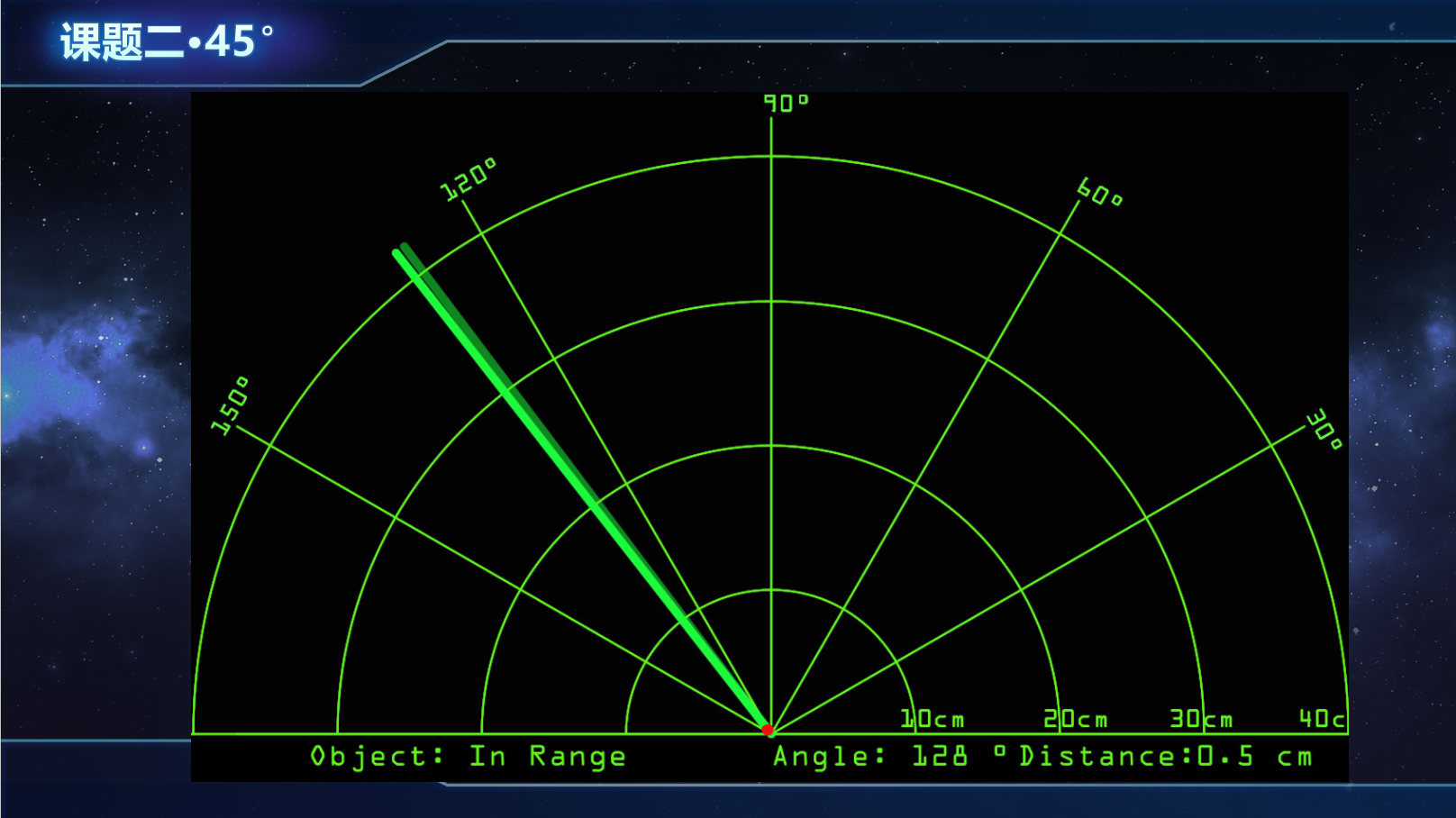
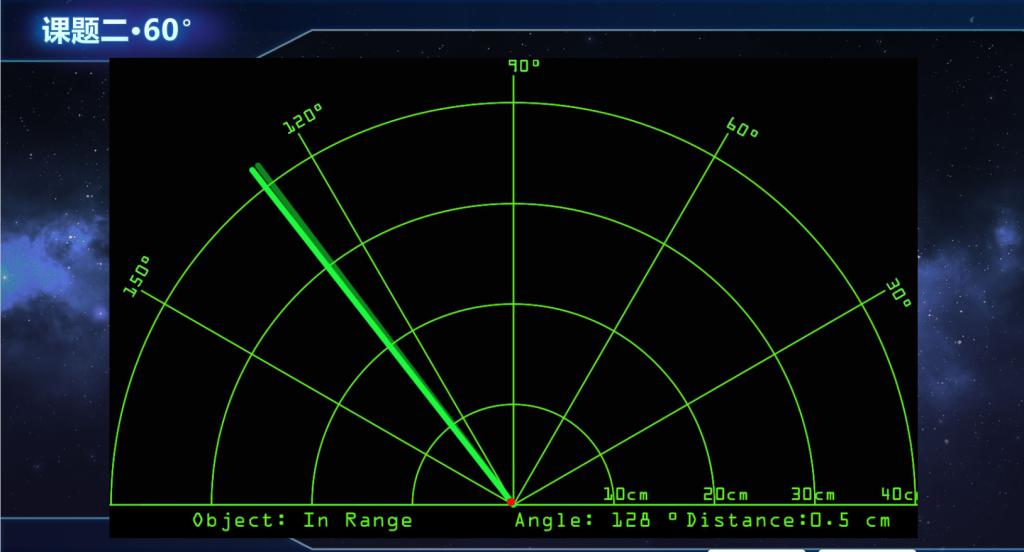
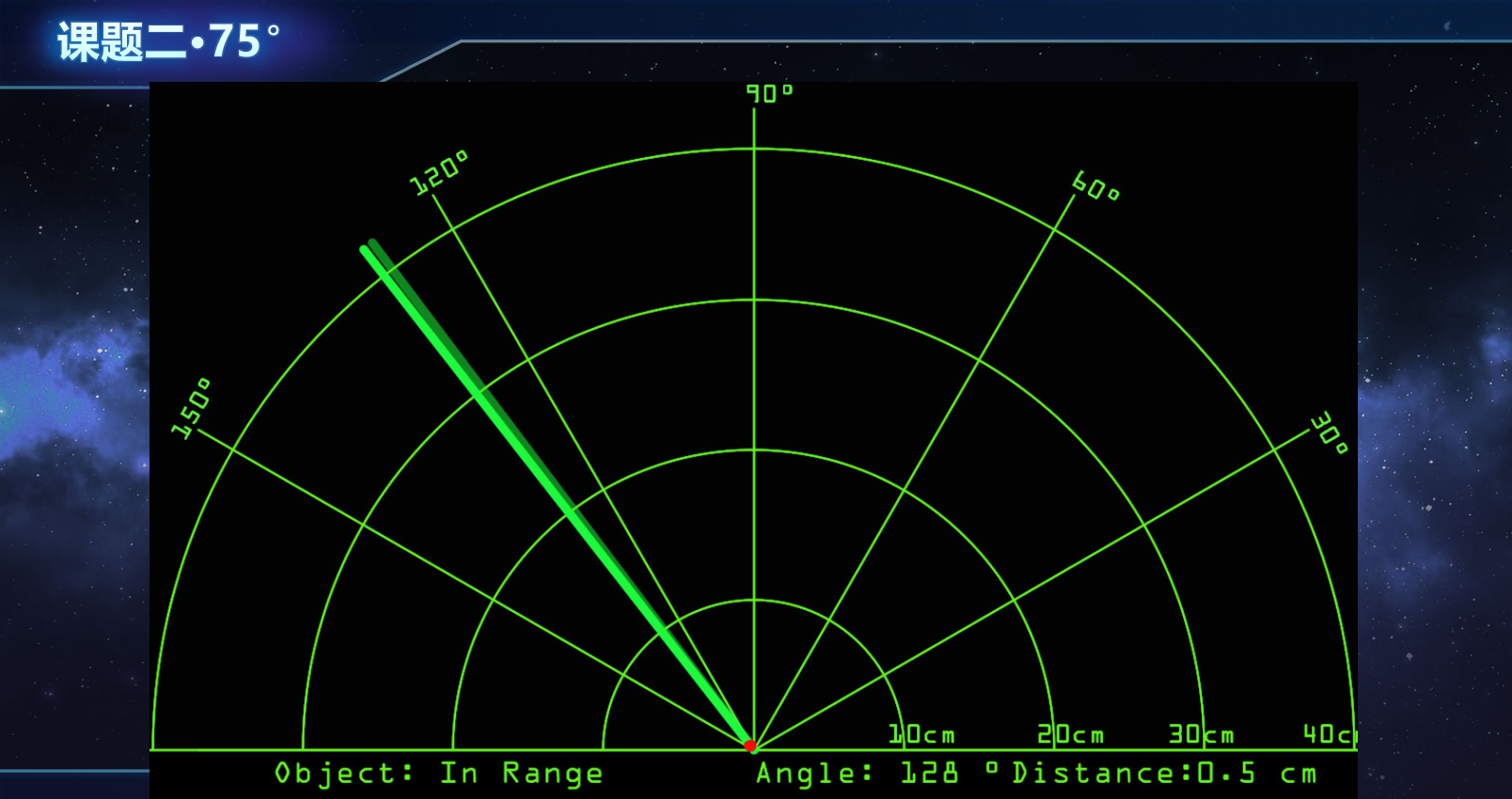
3.2 不同入射角度对超声波探测的影响
观测结果:
1. 在15°和30°时,目标物图像清晰,测距准确。
2. 随着角度增大至45°、60°和75°,目标物在雷达图像上的强度显著减弱,轮廓变得模糊不清,且测得的距离值开始出现较大误差(通常大于实际垂直距离)。
科学分析与推论:
此现象遵循镜面反射(Specular Reflection)定律。与光波类似,当超声波以一个角度(入射角)射向光滑平面时,其主要的反射能量会以相等的角度(反射角)集中反射出去。
小角度入射(如15°):反射波束的方向与入射波束方向夹角较小,仍有相当一部分能量能够返回到传感器。
大角度入射(如60°、75°):反射波束的方向几乎与入射方向平行,从而完全偏离传感器接收区域。此时,传感器只能接收到经由物体表面粗糙度造成的微弱漫反射(Diffuse Reflection)信号,或者来自周围环境的二次反射信号,导致测距失效或读数严重偏大。这是超声波雷达对斜面探测能力弱的主要原因。
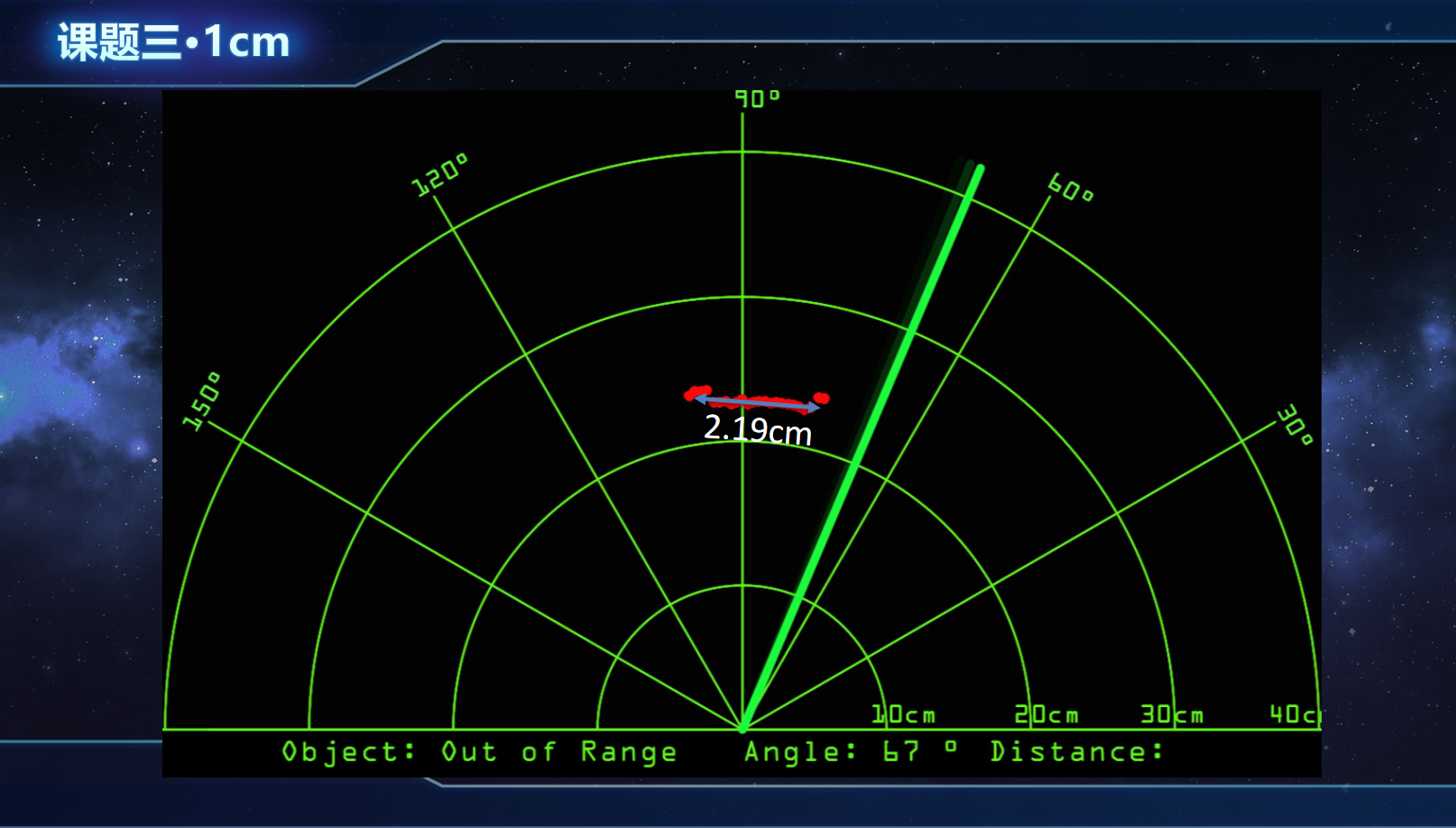
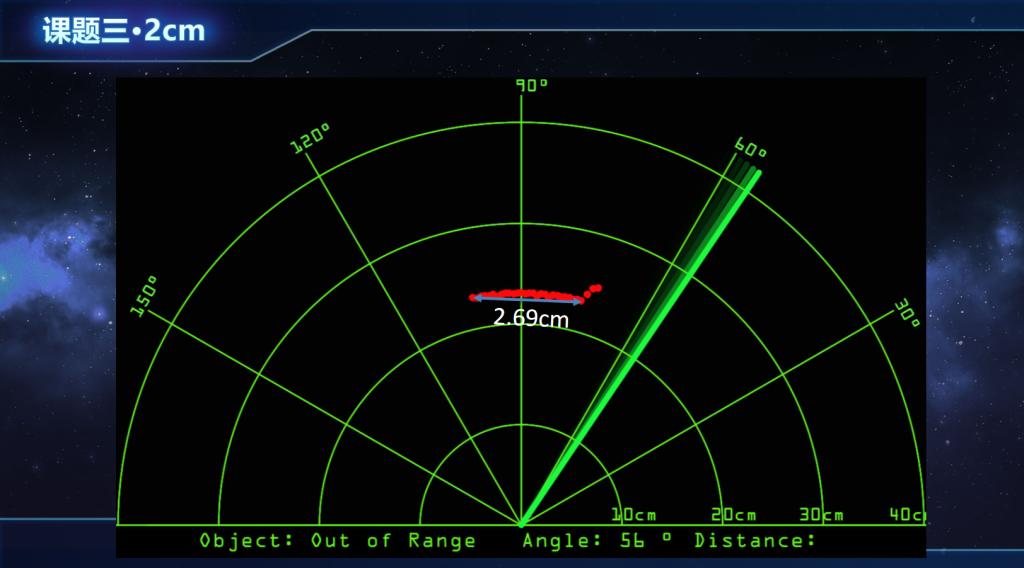
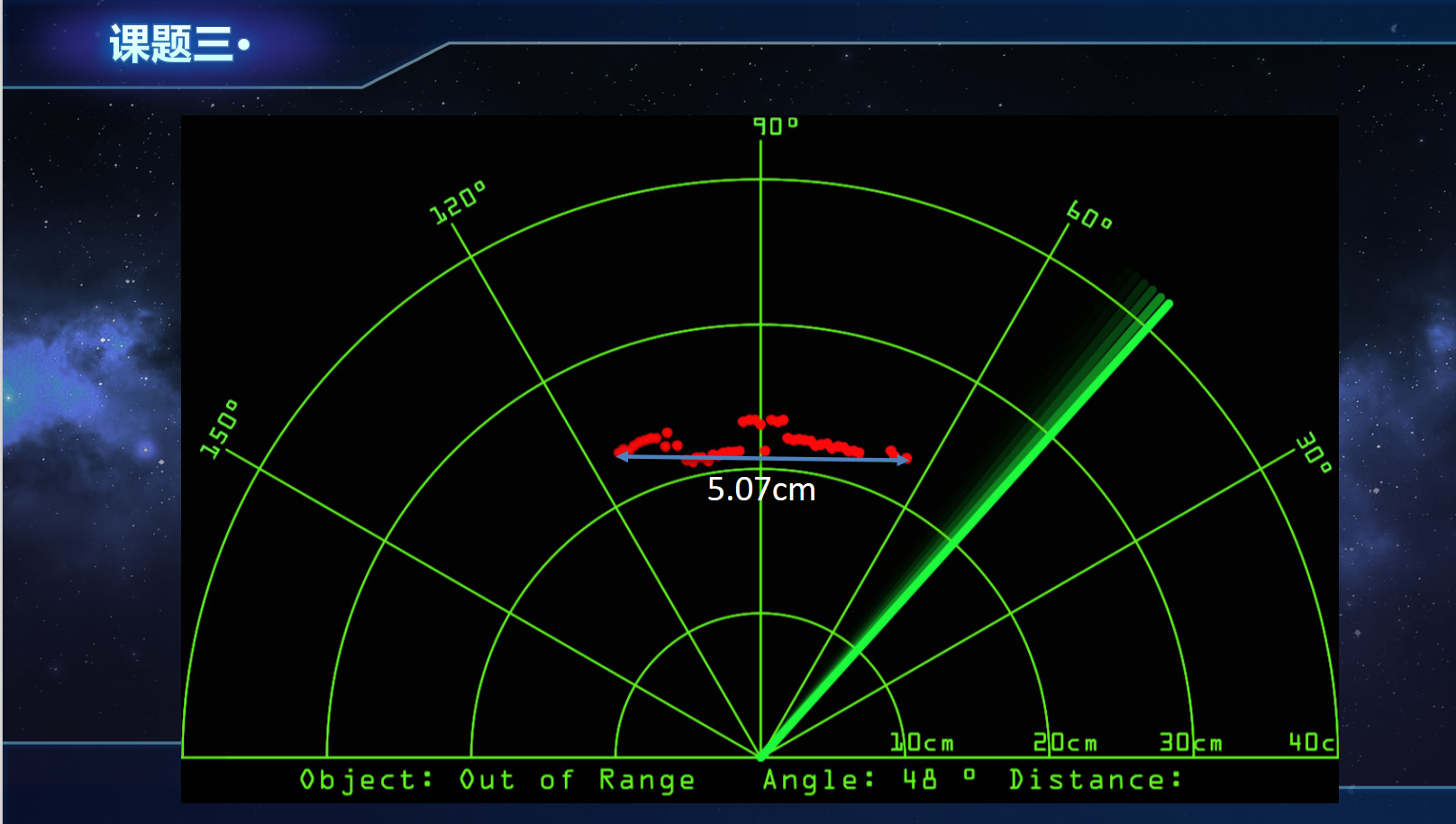
3.3 不同宽度对超声波探测的影响
观测结果:
1. 3厘米和4厘米宽的目标物能被稳定、清晰地探测和成像。
2. 2厘米宽的目标物成像不稳定,时有时无。
3. 1厘米宽的目标物在绝大多数情况下无法被探测到。
科学分析与推论:
此现象与超声传感器的波束角(Beam Width)密切相关。HC-SR04等传感器并非发射一条理想的“线”,而是发射一个具有特定张角的圆锥形波束(典型波束角约为15°)。
波束覆盖原理:在固定距离下,波束覆盖的平面区域是一个圆形斑点。只有当目标物的宽度大于或接近该波束斑点的直径时,才能产生足够强的回波。对于1-2厘米的窄目标,超声波波束的大部分能量从其两侧“溜走”,照射到目标上的能量比例很小,导致回波信号强度低于传感器的检测阈值。
理论上宽度远小于5.2cm的目标物难以被稳定探测。实验中3-4cm的物体已接近或部分覆盖波束核心区,故能被探测;而1-2cm的物体则大部分时间处于探测盲区。
4. 结论与展望
本研究通过系统实验,明确了目标物体物理特性对超声波雷达探测性能的决定性影响,并基于声学原理进行了深入阐释,得出以下核心结论:
1. 材质影响主要由声阻抗匹配和声波吸收效应主导。坚硬、致密、表面光滑的材料反射性能最佳;柔软、多孔的材料则因强烈吸收声波而难以被探测。
2. 角度影响遵循镜面反射定律。入射角越大,有效回波信号衰减越剧烈,严重制约了超声波雷达对倾斜表面的探测能力。
3. 宽度影响受限于传感器的波束角。目标物必须具有足够的尺寸以拦截超声波束的大部分能量,方能被可靠识别。
这些结论对实际应用具有重要指导意义。例如,在机器人设计中,应意识到超声波无法有效探测窗帘、地毯等吸声材料;在自动驾驶的感知系统中,需结合其他传感器(如激光雷达、视觉摄像头)以弥补超声波在探测斜面和窄小物体方面的固有缺陷。
未来工作展望:本研究可进一步深化,例如定量测量回波信号强度(电压值),建立更精确的数学模型;研究不同距离下各因素的影响规律;或尝试通过传感器阵列和先进的信号处理算法来补偿角度和尺寸带来的探测劣势。
5.参考文献
[1] HC-SR04 Ultrasonic Sensor Datasheet.
[2] Kinsler, L. E., et al. *Fundamentals of Acoustics*. 4th ed., Wiley, 2000.
[3] Arduino Official Documentation. https://www.arduino.cc/