软体机械手的制作与抓取性能实验研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手的制作与抓取——性能实验研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
课题编号 |
周立彭 |
男 |
高一(6) |
组长 |
zp07g02n01 |
|
丁允航 |
男 |
高一(6) |
组员 |
zp07g02n01 |
|
刘子木 |
男 |
高一(6) |
组员 |
zp07g02n01 |
|
任俊洁 |
女 |
高一(6) |
组员 |
zp07g02n01 |
|
陈逸凡 |
女 |
高一(6) |
组员 |
zp07g02n01 |
|
丁云飞 |
女 |
高一(6) |
组员 |
zp07g02n01 |
|
指导教师 |
张冠亚 |
||||
课 题研 究的 背景 目的 及 主 要 内 容 |
1、背景及目的: 21世纪的今天,各种科学技术飞速发展,为人们的生活带来了极大便利,但同时也对科学实验的工具提出更大要求,原有的硬机械手难以满足一些精量化实验的要求,于是软机械手应运而生。 相对硬机械手而言,软机械手具有更好的柔韧性,可以避免损伤易碎物品;同时其材料具有较强可塑性,可根据需要调整。针对此项目,小组成员打算通过三个小实验制作软体机械手,并探究软体机械手抓取性能的影响因素,希望对现代机械手科技有更深入的了解。 2、主要内容: 实验一、研究软体机械手制作过程; 实验二、探究软体机械手抓取方式采用包络或指尖方式进行抓取物料,探究抓取力的大小; 实验三、探究软体机械手手指数量变化(2-4手指),探究抓取力的大小。 |
||||
研 究 假 设 |
软体机械手的抓取性能与抓取方式(指尖抓取/包络抓取)和手指数量(2-4个)有关,软体机械手更适合抓取小型轻质的物质。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 。 二、8月27日-8月29日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,领取并检查物资。 三、8月30日-10月30日
1.登录在线学习平台 2.完成探究性学习导论,合作讨论课程学习; 3.完成储备知识课程学习和课题任务的节点任务提交; 4.完成实验探究的课程学习和课题任务的节点任务提交; 5.利用科探方舟盒子完成课题探究实验。 四、11月1日-11月15日 1. 进行课题研究,视频编制汇报; 2. 形成成果撰写论文; 3. 科学海报绘制; 4. 撰写PPT课题汇报材料。 五、11月16日-11月22日 成果完善和修改 六、11月23日-11月28日 1.科学海报评选 2.ppt答辩 3.科技论文评选 七、11月30日 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
答辩PPT,论文,海报 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
5. 徐州一中综合实践活动(研究性学习)记录表
课题题目:软体机械手的制作 |
编号:zp07g02n01 |
||
活动时间:2025年10月2日 |
第3次 |
活动地点:自习室 |
|
指导教师:张冠亚 |
班级:高一(6)班 |
||
参加活动成员: 周立彭、丁允航、陈逸凡、任俊洁、刘子木、丁云飞 |
|||
活动内容: 1)目的(解决什么问题): 利用实验材料制做软体机械手,组装测试驱动电路板装置。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ①用硅胶、硬纸板模具、热熔胶枪等设备和材料制作机械手手指; ②将电机、UNO集成电路板、控制按钮、连接导线等组装成电器驱动控制装置,载入实验代码进行电路测试; ③完成机械手指与电路板的组装,检验软体机械手能否成功运行。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:用硅胶制成软体机械手手指;组装驱动电路实现软体机械手指运动。 ②解决了哪些的问题:a、针对硅胶放入指型模具、凝固时间长,制作利用率低的情况,我们研究讨论四个人同时进行制作,一次性制作4个机械手指,进行烘箱烘烤,缩短机械手凝固成型时间。b、在电路调试过程,克服困难,查找资料,下载测试程序软件,检测电路是否完好,多次调整插板位置,才取得成功。 ③完成了预定目标和计划。 新的问题:电机驱动轮和电机轴伸长度不匹配,采用螺丝固定不稳定。 记录者: 周立彭 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
6. 徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 软体机械手的制作与抓取——性能实验研究 |
编号:zp07g02n01 |
||||
课题组成员 |
组长:周立彭 |
组员:丁允航、陈逸凡、任俊洁、刘子木、丁云飞 |
|||
指导教师:张冠亚 |
报告执笔人:周立彭 |
完成时间:11月17日 |
|||
主导课程:软体机械制作与抓取 |
相关课程:控制电路 |
||||
(一)书面材料 |
|||||
课题成果: 1)预期的成果: 制作软体机械手手指比较成功;针对不同软件机械手不同抓取方式和手指数量(利用2个手指、3个手指、4个手指)进行抓取实物,取得不同实验数据。 2) 课题实际取得的成果: 实验一结果:利用硅胶材料制作出机械手,比较柔软、有韧性,制作过程简便可行。 实验二结果:同等条件下,软体机械手抓取性能与抓取方式有关,采用包络抓取方式抓取力比采用指尖抓取方式抓取力大。 实验三结果:同等条件下,软体机械手抓取性能随着手指数量增多,抓取力大小和稳定性都有所提高。 |
|||||
参考书目及资料: 1.焦志伟、于源、程祥《软体机器人技术》2025-02版; 2.徐州一中科探方舟《软体机械手的制作与抓取实验手册》。 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4.软体机械手的制作与抓取性能实验研究
徐州市第一中学高一(6)班 周立彭 丁允航 陈逸凡 任俊洁 刘子木 丁云飞
【摘要】
适应现代科学研究高自由度需求,具有更高柔性的软体机械手需要进一步发展。本文按照提出问题——作出假设——设置实验——数据分析——得出结论的一般路径,分析了软体机械手的制作过程与抓取性能的影响因素,系统研究了软体机械手技术方面的问题,总结了影响软体机械手抓取性能的因素,探索的软体机械手的发展前景与创新课题。
【关键词】软体机械手; 抓取力; 抓取实验; 数据分析;
0 引言
20世纪五六十年代,人类进入了全新的机器人时代。经过70多年的迅速发展,机器人已广泛应用于各个领域,具有高精度,高速度,负载高等特性。
随着科学研究领域的不断深入,实验对于机器人的自由度和柔性提出了更高的要求。原有的刚性结构不足以满足新型实验的需要。科学家通过研究动物软体组织,发现了其变形大,质量轻,柔韧性大的特点,由此展开了对软体机器人领域的研究。
在实际应用中,机器人是通过机械手来完成操作的,软体机械手研究是软体机器人领域的重要组成部分之一,通过模仿人手的弯曲动作产生的抓取力,从而实现对物体的抓取。
软体机械手可以实现对易碎易损物体的抓取,改善了传统刚性机械手的安全性和人机交互性,目前已被广泛应用于人类的社会生活和生产中,为解放人的劳动,实现工业生产的机械化和自动化发挥了重要作用。同时对该项目的研究,响应了国家科教兴国战略的要求,有利于加快我国向科技创新强国进军。
实验一、研究软体机械手制作过程;
实验二、探究软体机械手抓取方式采用包络或指尖方式进行抓取物料,探究抓取力的大小;
实验三、探究软体机械手手指数量变化(2-4手指),探究抓取力的大小。
1 提出问题
在日常生活中,人类会用手抓取东西。我们可以用5个指的指尖抓取或者直接用整只手抓取,软体机械手也可以类比考虑。
因此设想影响软体机械手抓取性能的因素:
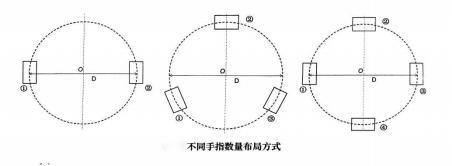
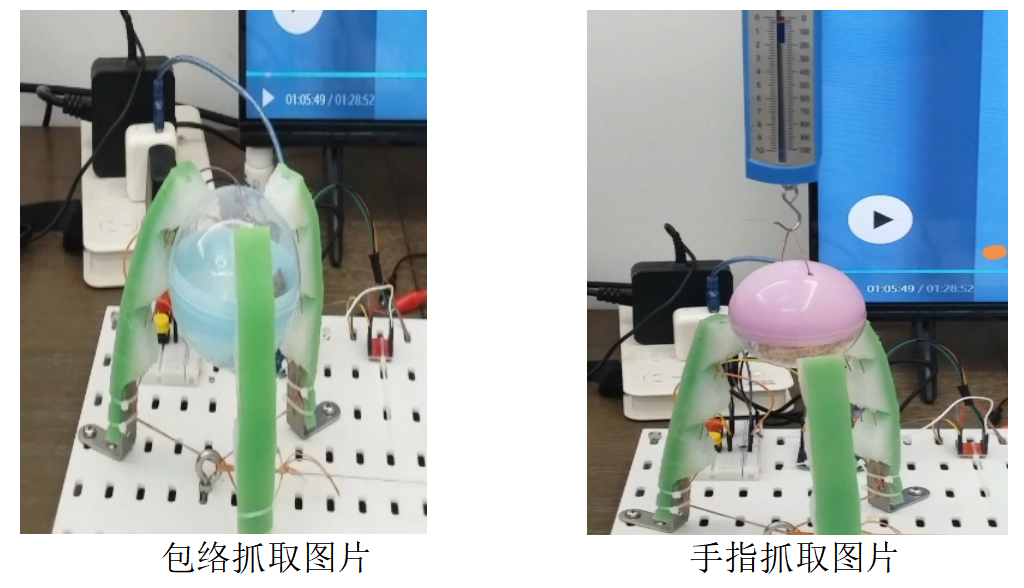
猜想一:软体机械手的抓取方式
因此我们提出了两种抓取方式,指尖抓取和包络抓取方式进行对照。具体如下图:
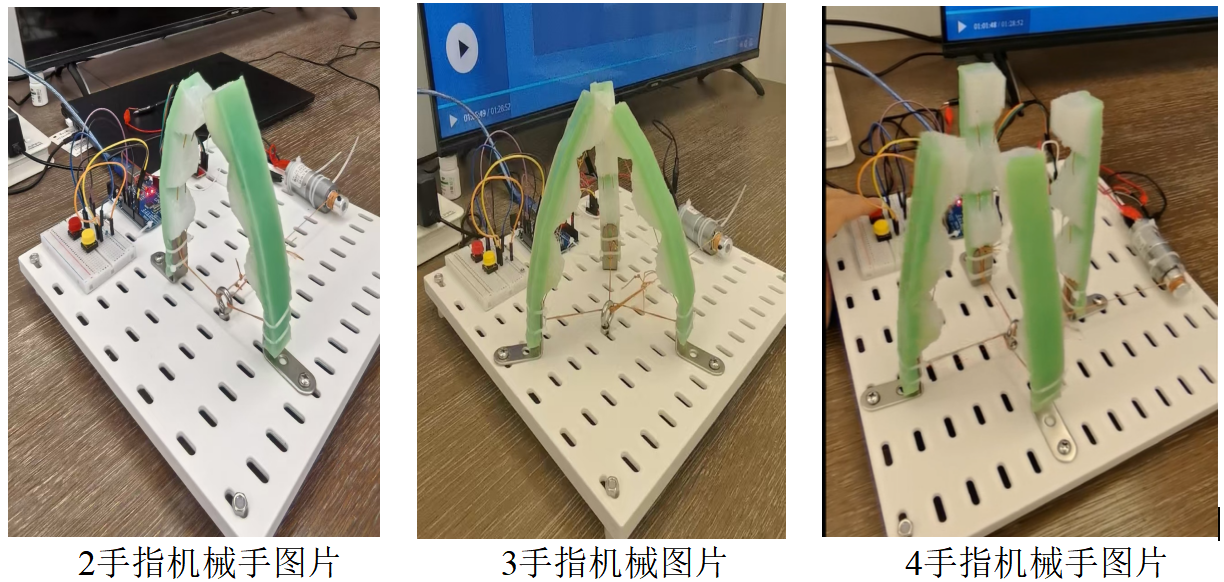
猜想二:不同手指数量抓取
通常来说手指数量越多,抓取效果越好。按照制作软体机械手的制作方法依次制作二指,三指,四指手爪,每种情况下保证手指均匀分布在直径约为12cm的圆周上。示意图如下:
为了实验的科学性和严谨性,针对物体不同形状大小、不同材料进行反复探究以确认。
2 实验研究
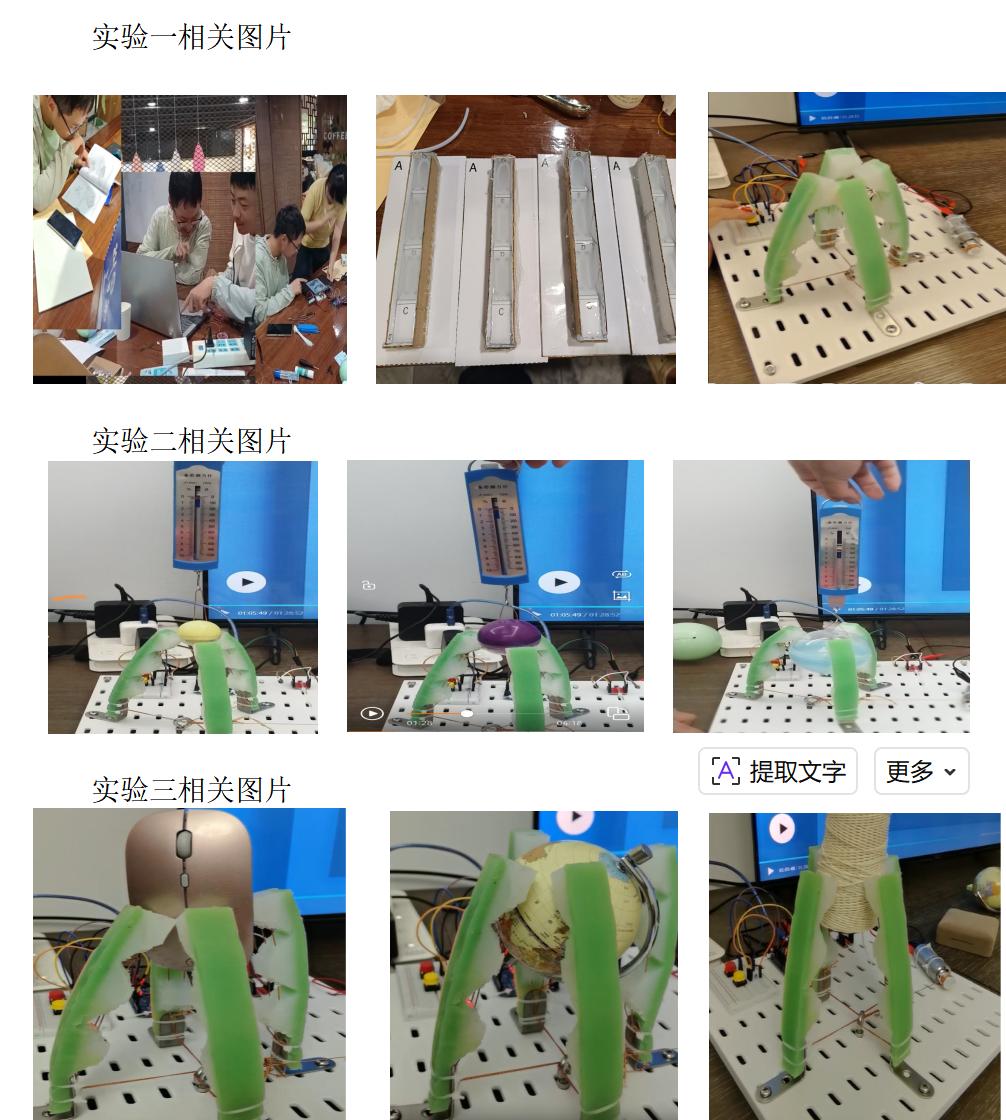
2.1 探究软体机械手制作过程
(1)软体机械手制作材料:美工刀、纸杯、热熔胶枪、热熔胶棒、打孔器、电子秤、轮胎线、聚乙烯硬管、瓦楞纸、30度AB硅胶、50度AB硅胶、丙烯颜料、手指模板、宽胶带(自备)、液体胶水(自备)、一次性筷子(自备)。
(2)制作软体机械手指:具体参照科探方舟《软体机械手的制作与抓取实验手册》,将瓦楞纸裁剪,用热胶枪热熔胶棒粘接成手指模版形状,然后将硅胶注入模版,烤箱烘烤凝固成型,再从模版中取出,制成手指状机械手。硅胶材料机械手柔软有韧性。
(3)电路板拼装调试:将电机、UNO集成电路板、控制按钮、连接导线等组装成电器驱动控制装置,载入实验程序代码进行电路测试,直到电机通过按钮控制能实现正反转为成功。
(4)软体机械手指并入控制驱动电路:再将已制作的机械手指按实验手册要求安装在电路板上,通过轮胎线与电机连接,利用电路控制开关控制电机正反转,测试软体机械手抓取、松开动作。
下图分别是按照《软体机械手的制作与抓取实验手册》2指、3指、4指软体机械手组装实验图片:
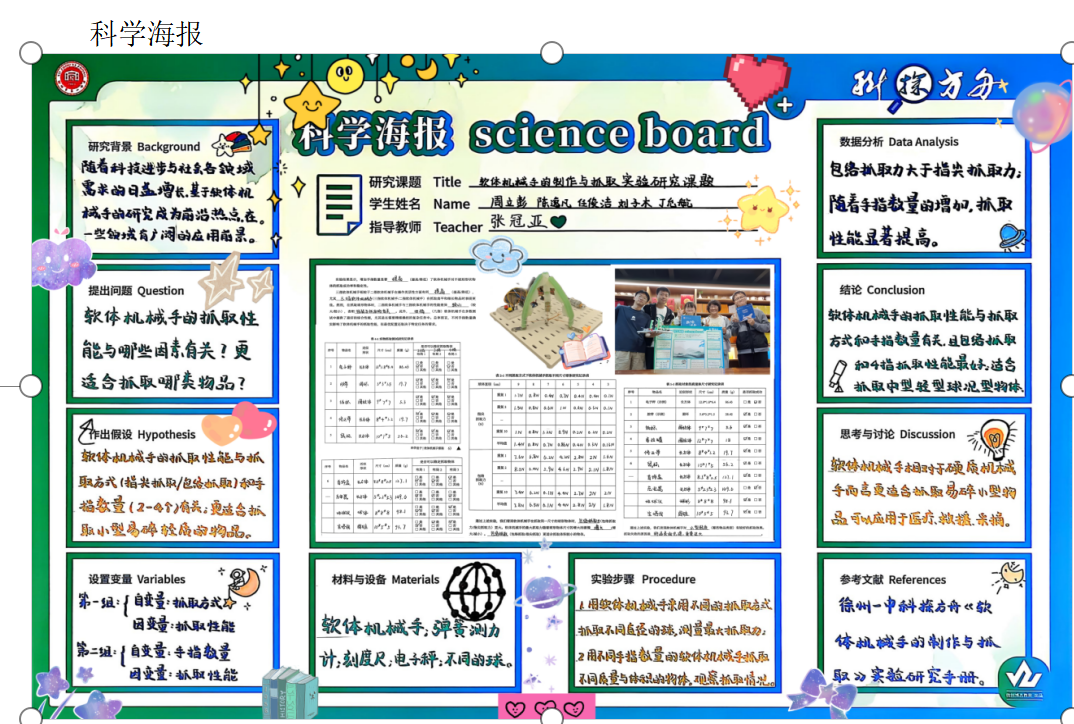
2.2 探究不同抓取方式对软体机械手性能的影响
本实验通过全体机械手的最大抓取力来反映其抓取性能。
实验材料:弹簧测力计、直径 3~9cm球盒、软体机械手抓手、电子秤、轮胎线、大号螺丝刀、直尺、剪刀。
实验步骤:
(1)按照上面软体机械手的制作方法制作一个三指圆周手爪(三根手指均匀分布),两根手指之间的距离约为 10cm。
(2)选取7个不同直径的球体作为抓取对象,直径为 3~9cm ,每个球体中装入填充物以确保球体质量相同,均为 25g 左右。
(3)将轮胎线穿过球体小孔并打结。
(4)用软体机械手夹持球体,用弹簧测力计勾住塑料球壳上的轮胎线,数值缓慢匀速向上拉动,直至球体被拉出软体机械手,在此过程中注意读取拉力计示数,记录最大值。每个球体每种抓取方式重复实验 10 次,记录每次实验的拉力最大值,最终取平均值
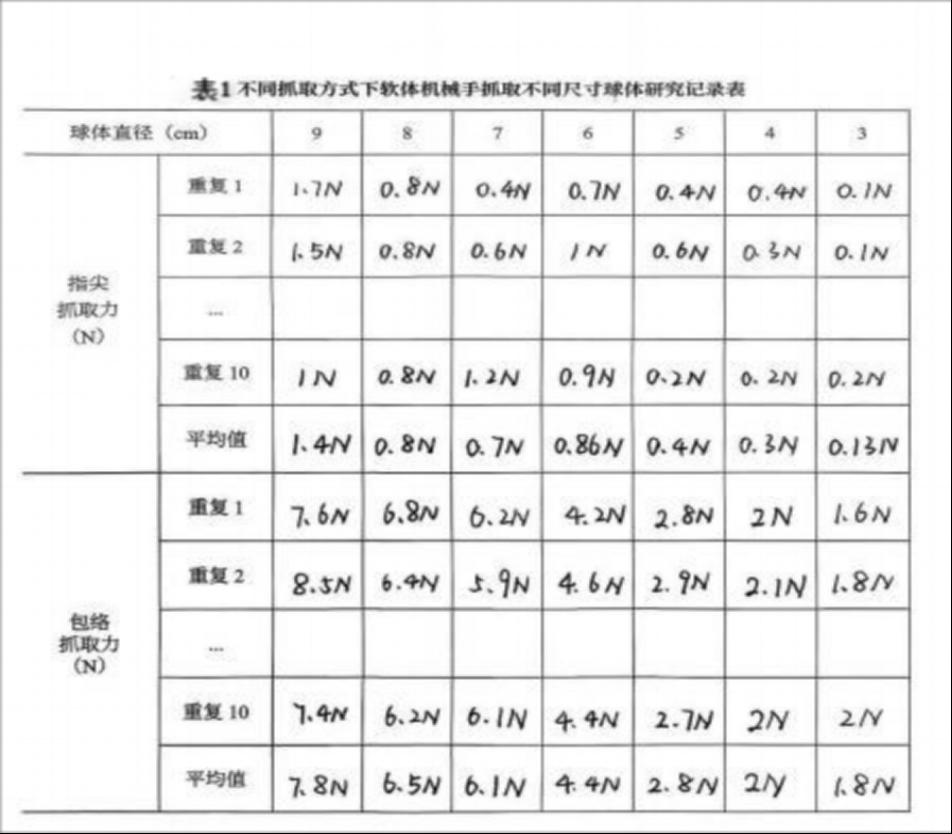
注意事项:在使用弹簧测力计时,要注意竖直拉取。使用弹簧拉力器时小心操作,避免弹簧收缩时被划伤最终实验研究数据如表1:
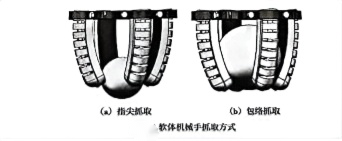
2.3 探究不同手指数量对软体机械手抓取性能的影响
实验材料:直径6~8cm球壳、软体机械抓手、电子秤、轮胎线、大号螺丝刀、直尺、剪刀。
实验步骤:
(1)按照上面软体机械手的制作方法,依次制作二指,三指,四指手爪,每种情况下保证手指均匀分布在圆周上。
(2)选择大小形状不同的物体进行抓取实验,记录物体尺寸和质量,观察和记录不同数量手指的软体机械手在抓取不同物体时的抓取性能差异。
(3)选择三个不同直径的球体作为抓取对象,每个球体装入一些填充物,以保证球体质量相同,均为 25g 左右。
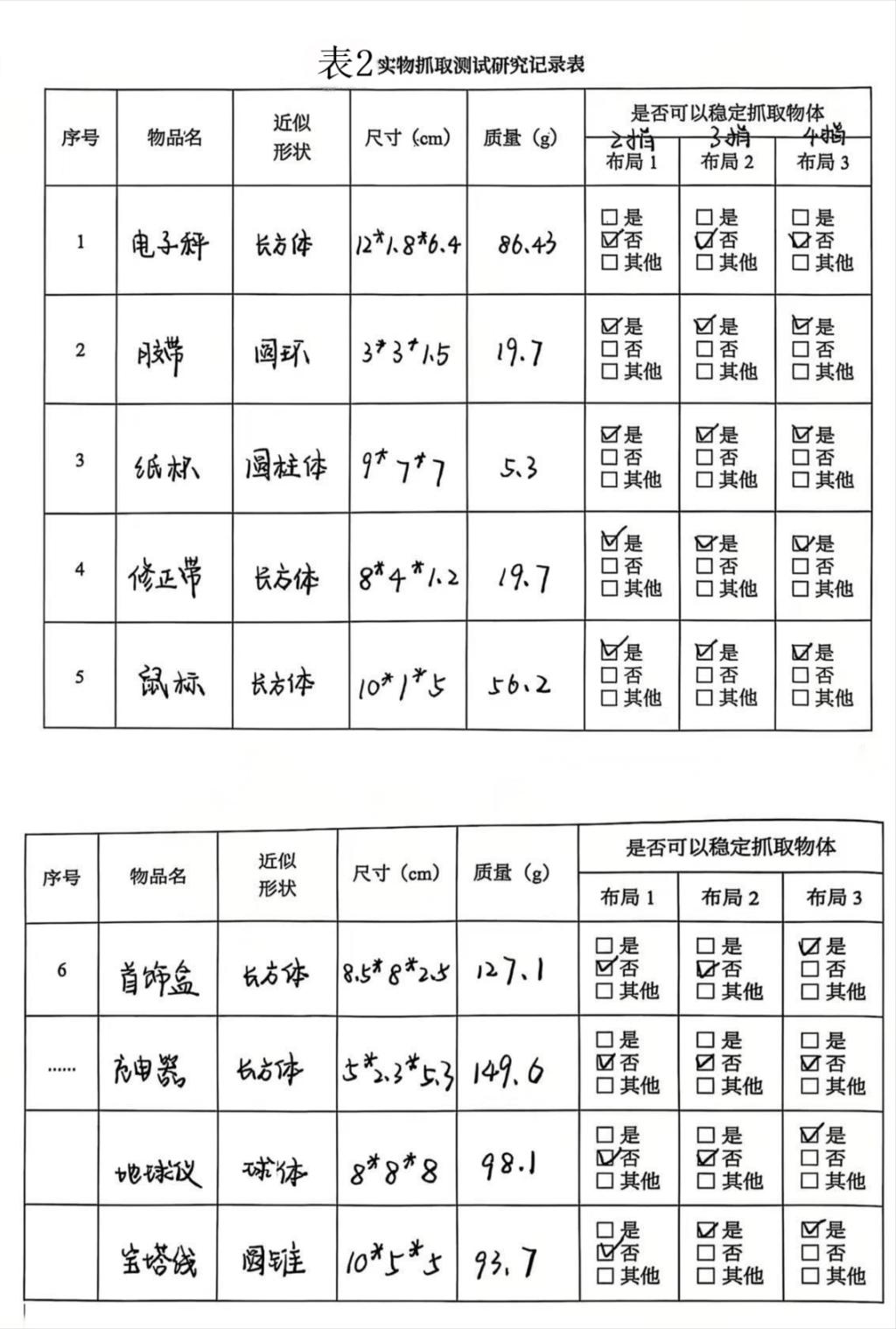
实验数据如表2:
3 数据分析
3.1 基于2.2实验数据的分析
在2.2实验中,探究了不同抓取方式(指尖抓取和包络抓取)对抓取性能的影响。从表1中数据可以看出,同样条件下,包络抓取方式产生的抓取力显著高于指尖抓取方式。例如,对于直径 9 cm 的球体,包络抓取的平均抓取力为 7.8 N ,而指尖平均抓取力为 1.4 N ;对于直径6cm的球体,包络抓取的平均抓取力为 4.4 N ,而指尖平均抓取力为0.86 N;对于直径 3 cm 的球体,包络抓取平均抓取力为 1.8 N ,指尖平均抓取力为 0.13 N 。
此外,随着球体直径9~3cm减小,指尖抓取力由1.4N~0.13N变化;包络抓取力由7.8N~1.8N变化,可以看出抓取力随球体直径减小而降低;同时可以看出包络抓取的下降幅度相对较小,说明包络抓取更适应不同尺寸球体,能提供更稳定和高效的抓取性能。
3.2 基于2.3 实验数据的分析
在2.3实验中,探究了不同手指数量(2指、3指和4指布局)对抓取性能的影响。通过表2中数据分析,对于小型和轻型物品(如眼带、纸杯、修正带和鼠标),所有手指布局均能实现稳定抓取。
然而,对于较大或较重的物品(如电子秤和充电器),即使使用4指布局也无法稳定抓取。
对于中等物品(如首饰盒、地球仪和宝塔线),增加手指数量能改善抓取稳定性。首饰盒和地球仪在 4 指布局下可稳定抓取,而在2指或3指布局下失败;宝塔线在3指和4指布局下成功,但在2指布局下失败。这表明手指数量的增加有助于提升抓取可靠性,但抓取性能仍受物品质量、形状和尺寸限制。
4 讨论
4.1 分析结果对于研究的意义
实验数据经过了科学的、严谨的记录与分析,最大限度确定了实验结果的可靠性。
实验数据分析,将研究从定性观察推进到了定量关联的阶段,其结论对软体机械手的性能预测、设计改进与应用拓展具有重要的科学意义。
4.2 研究的局限性
4.2.1 测试对象的代表性与多样性不足
·形状单一:实验2.2中仅采用球体作为测试对象。球体具有规则且连续的几何表面,有利于包络抓取,但无法充分反映软体机械手抓取不规则形状、带有棱角或复杂几何特征物体的性能。
·材质单一:测试物体(如塑料球壳、纸杯等)的表面摩擦系数、刚度等物理属性较为接近,未能全面考察机械手在面对光滑、柔软、粘性或其他特殊表面材质物体时的适应性。.
4.2.2 机械手结构本身的限制
·手指结构与布局固定:研究测试了不同手指数量,但所有手指均采用相同的结构与尺寸,且布局为固定的圆周对称。未能探究非对称布局、不同长度或刚度的手指混合使用对抓取性能的潜在提升。
·缺乏传感与反馈:本研究中的机械手为开环驱动,不具备触觉或力传感器。因此,无法实现基于实时反馈的自适应抓取,这限制了其在不稳定或未知环境中的应用潜力,也使得无法量化抓取过程中的柔顺性。
5 结论
5.1 软体机械手制备过程中的问题
5.1.1材料处理与固化环节
·气泡残留:在混合与浇筑 AB 硅胶时,若搅拌或脱泡不充分,残留气泡会在固化后的手指内部形成空腔,显著降低手指的结构强度与驱动稳定性,可能导致局部破裂或变形不均。
·固化缺陷:环境温度、湿度变化或固化剂比例不准,可能导致硅胶固化不完全(发粘)或固化过快(产生内应力),影响材料的最终弹性和耐用性。
·脱模困难:若脱模剂涂抹不均或模具设计存在倒扣结构,在脱模时极易造成硅胶手指撕裂或永久变形,导致产品报废。
5.1.2 结构组装与整体一致性
·多指协同差异: 由于各手指在制备过程中存在的微小个体差异(如尺寸、刚度),在统一驱动压力下,其运动响应可能不一致,影响整体抓取的稳定性和对中性。
·底座结构强度不足:手爪底座(如瓦楞纸材质)若刚性不够,在驱动压力下可能发生形变,破坏手指的相对空间位置,影响抓取规划。
5.2 影响软体机械手抓取性能的因素
基于实验数据分析,影响软体机械手抓取性能的关键因素可归纳为以下三点:
·抓取策略:包络抓取通过增大接触面积,其抓取力显著优于指尖抓取,是实现稳定抓取的首选策略。
·结构配置:增加手指数量(如从二指增至三指或四指)能提升抓取可靠性与对物体的包容性,但其性能提升存在上限。
·物体属性:物体的质量、尺寸与几何形状直接决定抓取成败。机械手对轻质、规则形状物体表现出色,但对重型或低摩擦物体抓取能力有限。
参考文献:
1.焦志伟、于源、程祥《软体机器人技术》2025-02版;
2.徐州一中科探方舟,《软体机械手的制作与抓取实验手册》。