基于HC-SR04超声波传感器的微型雷达设计与研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于HC-SR04超声波传感器的微型雷达设计与研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
账号 |
王芊依 |
女 |
高一16 |
组长 |
zp06g06n03 |
|
何佳栩 |
女 |
高一16 |
组员 |
zp06g06n03 |
|
丁齐悦 |
女 |
高一16 |
组员 |
zp06g06n03 |
|
张煜皓 |
男 |
高一16 |
组员 |
zp06g06n03 |
|
马梁馨 |
女 |
高一16 |
组员 |
zp06g06n03 |
|
指导教师 |
邵馨阅 |
||||
研 究 背 景 |
1、超声波雷达作为一种重要的传感器,广泛应用于机器人避障、自动驾驶、智能安防等领域。 2、在实际应用中,物体的材质、角度、宽度等因素会显著影响雷达的探测效果,可能导致误判或漏检。 3、本研究通过系列实验,系统探究了这些因素如何影响超声波雷达的探测结果,旨在为优化雷达应用提供数据支持和实践参考。 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 意 义 |
目的:本研究通过系列实验,系统探究了这些因素如何影响超声波雷达的探测结果,旨在为优化雷达应用提供数据支持和实践参考。 主要内容:实验一、成功设计并制作一个基于HC-SR04的超声波雷达装置; 实验二、 探究不同材质(海绵、高密度泡沫、塑料、木头)对雷达识别效果的影响; 实验三、探究物体不同角度对雷达探测范围(角宽度)的影响; 实验四、探究物体实际宽度与雷达测量宽度的关系,并建立修正模型。 主要意义:深化对超声波探测原理的理解,为设计更可靠的探测系统和识别算法奠定基础。
|
||||
研 究 方 法 |
实验、查找资料。 |
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排)
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月19日-8月23日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月24日-8月25日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月26日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 进行课题研究进展汇报 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月25日-11月30日 1. 科学海报评选 2. PPT 预答辩 3. 科技论文评选 七、12月底 闭幕式,进行成果的汇报与表彰 |
成果形式 |
PPT.论文 |
论证 小组 意见 |
|
论证人签名: 年 月 日 |
|
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号:zp06g06n03 |
|||
活动时间:9月4日 |
第 1 次 |
活动地点:教室 |
||
指导教师:邵馨阅 |
班级:高一16班 |
|||
参加活动成员: 组长: 王芊依 组员:何佳栩 丁齐悦 张煜皓 马梁馨 |
||||
活动内容: 目的(解决什么问题): 成功设计并制作一个基于HC-SR04的超声波雷达装置。 形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 过程: ①课后在班级进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 结果 结论:简单的完成所需装置的简单组装,焊接,调试 记录者: 张煜皓 |
||||
3.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号:zp06g06n03 |
|||
活动时间:9月5日 |
第 2次 |
活动地点:斑斓空间设计事务所 |
||
指导教师:邵馨阅 |
班级:高一16班 |
|||
参加活动成员: 组长: 王芊依 组员:何佳栩 丁齐悦 张煜皓 马梁馨 |
||||
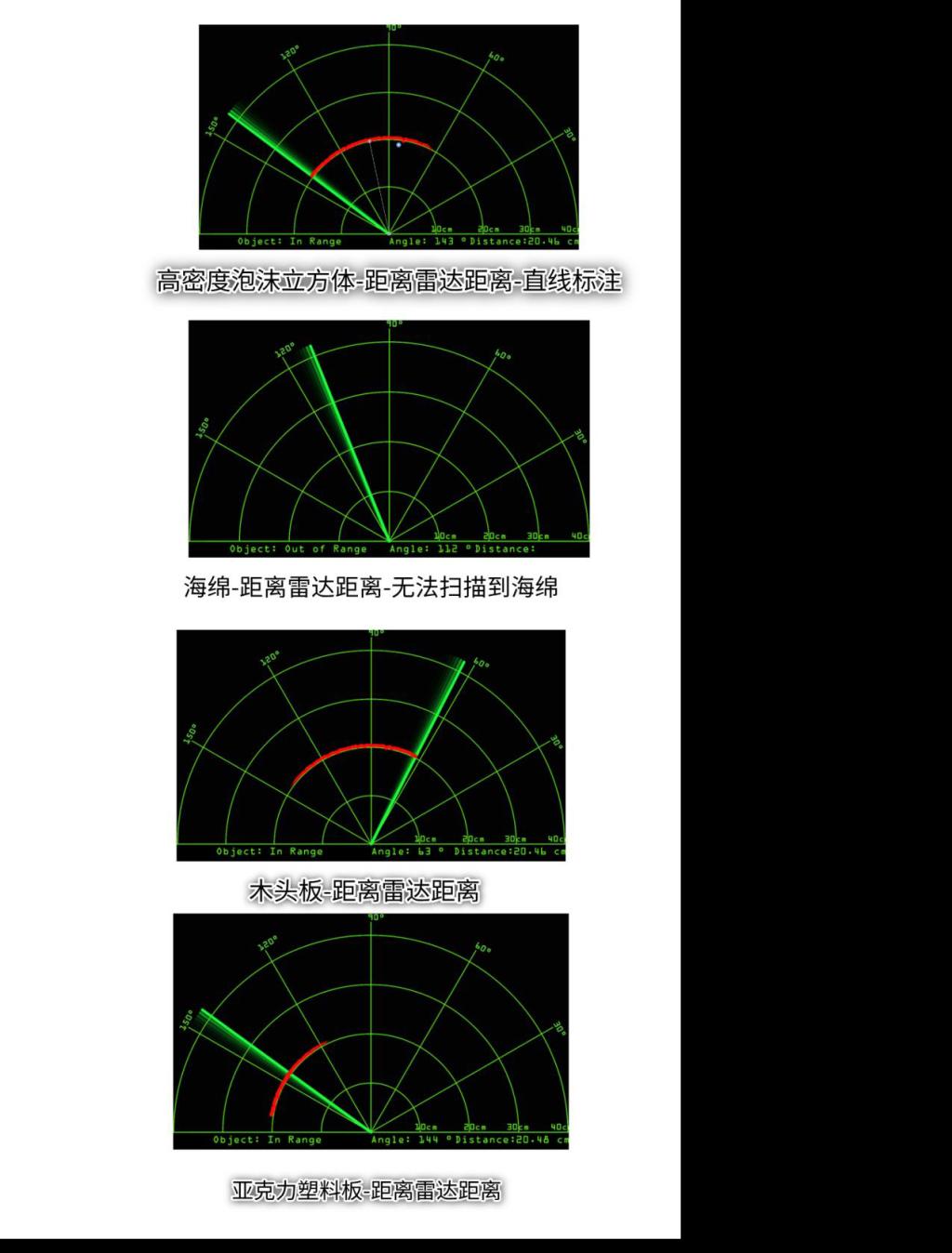
活动内容: 目的(解决什么问题): 探究不同材质(海绵、高密度泡沫、塑料、木头)对雷达识别效果的影响。 探究物体不同角度对雷达探测范围(角宽度)的影响。 形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 过程: ①在斑斓工作室反复进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:材质是影响探测的根本因素,柔软多孔材料具有“隐身”效果。 ②角度影响探测范围,正对时最佳,倾斜时探测范围变窄。 记录者: 张煜皓 |
||||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
4.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号:zp06g06n03 |
|||
活动时间:9月6日 |
第 3次 |
活动地点:斑斓空间设计事务所 |
||
指导教师:邵馨阅 |
班级:高一16班 |
|||
参加活动成员: 组长: 王芊依 组员:何佳栩 丁齐悦 张煜皓 马梁馨 |
||||
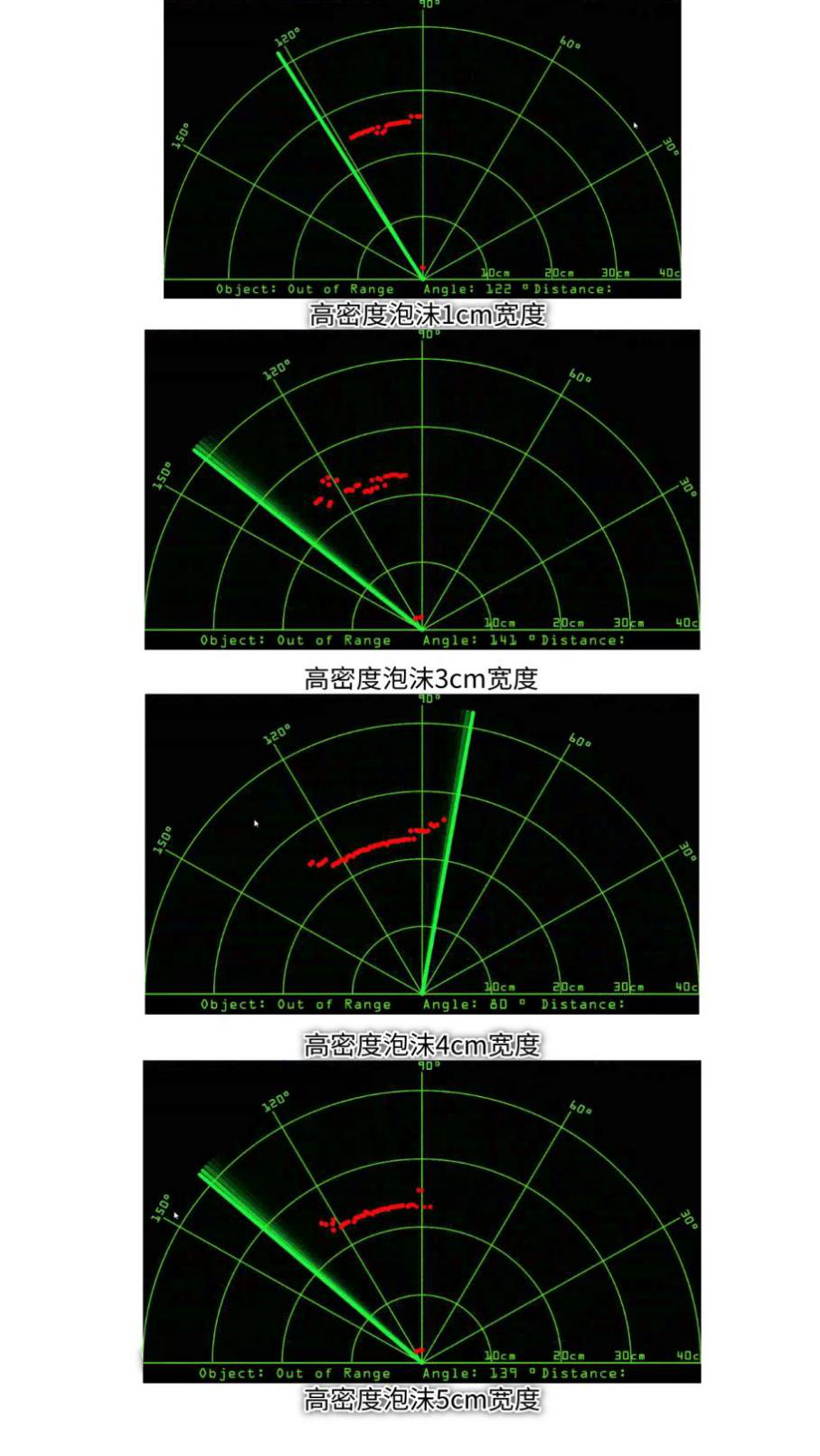
活动内容: 目的(解决什么问题): 宽度对超声雷达波的具体影响。 形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 过程: ①在斑斓工作室反复进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:宽度测量存在误差,但可通过建立数据模型进行有效修正。 记录者: 张煜皓 |
||||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号:zp06g06n03 |
||||
课题组成员 |
组长:王芊依 |
组员:何佳栩 丁齐悦 张煜皓 马梁馨 |
|||
指导教师:邵馨阅 |
报告执笔人: 张煜皓 |
完成时间:9月28日 |
|||
主导课程:超声雷达 |
相关课程:物理学 |
||||
(一)书面材料 |
|||||
课题成果: 预期的成果: 四个实验均成功,符合预定推测。 2) 课题实际取得不同材质结果不同原因: 1.材料:用厚海绵或软橡胶 原因:柔软多孔的材料能吸收掉大部分超声波能量,让它无法形成强烈的回声返回雷达,从而使雷达“听不见”。 2. 外形:做成多棱角或弯曲的表面 原因:如果做成许多倾斜的棱角(类似金字塔表面)或弯曲的形状,超声波撞上后就会被散射到各个方向,只有很少一部分能返回雷达,使其难以识别。 3) 课题实际取得的成果思考: 通过实验发现被检测物体的实际宽度越宽,超声波雷达检测到的宽度就越宽;物体的实际宽度和超声波雷达检测到的宽度不一致。可能由这些原因导致: 1.超声波的波束角较宽,导致检测范围大于物体实际宽度 2.物体表面材质影响反射效果(如柔软材质吸收声波,减少回波强度) 3.物体形状或边缘不规则,造成回波的散射 4.温度、湿度影响超声波传播速度 5.雷达不能精确识别物体边缘 4)通过雷达测到的宽度数据推测真实宽度的方案: 1. 记录实际宽度和检测宽度的成对数据 2. 在Excel中,以实际宽度为x轴,检测宽度作为y轴,绘制散点图,观察数据分布趋势 3. 在散点图上添加趋势线并显示公式(y = ax + b) 4. 根据公式,推导出实际宽度与检测宽度的关系(x = (y - b) / a) 5. 对于新的雷达检测宽度数据,代入公式即可估算实际宽度 |
|||||
参考书目及资料:· 闫昕,梁兰菊,张雅婷等。基于海情和三次样条插值算法的舰船雷达散射截面优化分析方法 [J]. 物理学报,2015, 64 (15): 154101. (SCIE/EI 收录)· 席泽敏,卢建斌,赵文强等。微波超视距条件下舰船目标 RCS 分层计算方法 [J]. 海军工程大学学报,2011, 23 (5): 46-49. |
|||||
附录材料(要求提交原始记录)包括:活动记录表(1)份 实验记录(1 )份(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 |
|||||
基于HC-SR04超声波传感器--微型雷达设计研究
一、研究背景
随着自动驾驶、无人机和智能家居技术的发展,雷达测距系统在现代科技中扮演着越来越重要的角色。传统雷达设备成本高、体积大,不适合在中小型智能设备中使用。为探索一种低成本、易实现的测距方式,我们利用 HC-SR04 超声波传感器 设计并制作了一个微型雷达装置,尝试实现简易的距离测量与障碍物探测功能。
二、研究目的
探究超声波传感器的工作原理及其测距规律。
设计一个可旋转的雷达系统,实现环境扫描与障碍物检测。
分析不同环境、角度和材质对测距精度的影响。
评估该装置在低成本条件下的实用性和改进方向。
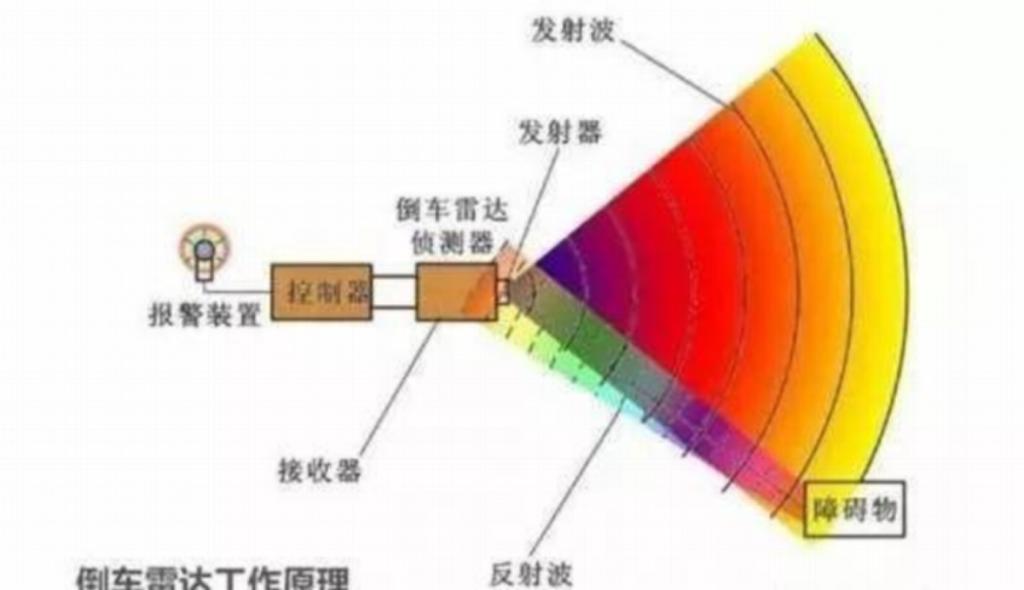
三、实验原理
HC-SR04 超声波传感器 通过发射超声波并接收回波来计算物体距离。
声速在常温(20°C)空气中约为 340 m/s。程序通过检测回波时间,计算出障碍物的距离并输出结果。
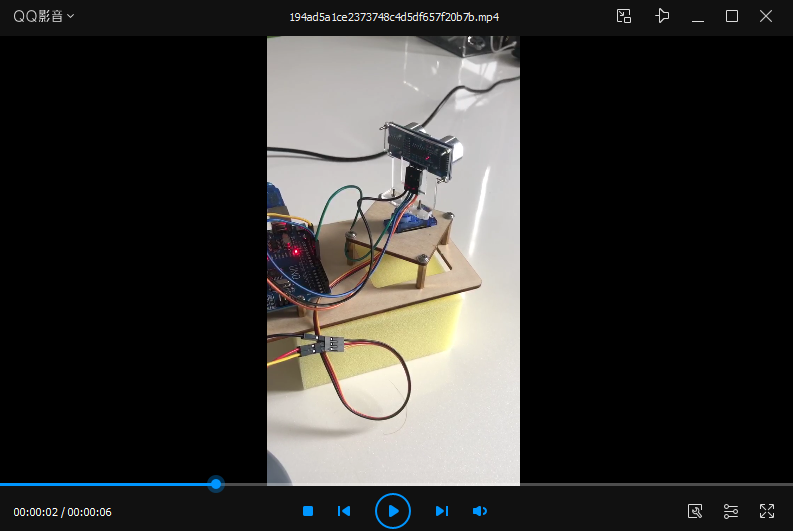
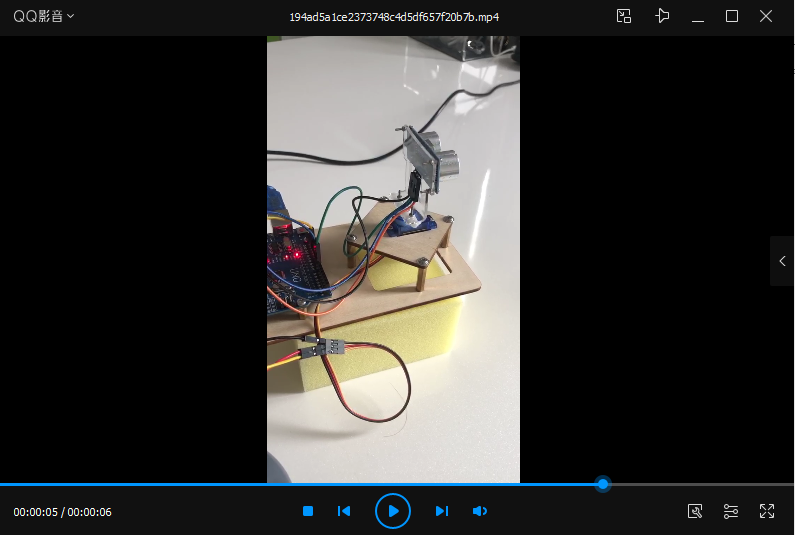
我们将传感器安装在可旋转舵机上,实现“雷达式扫描”,并在电脑上通过串口绘制简易的二维图像。
实验器材
HC-SR04 超声波传感器、Arduino UNO、舵机、杜邦线、电源模块、电脑(含Arduino IDE)
五、实验步骤
1.硬件搭建
2.将 HC-SR04 的 Trig、Echo 接口分别连接至 Arduino 的数字口;
舵机连接至 PWM 控制口,用于角度控制;
将传感器固定在舵机上,组成可旋转测距头。
程序编写
编写 Arduino 程序控制舵机从 0° 到 180° 循环扫描;
每隔 1° 触发一次超声波测距,并通过串口发送距离数据。
数据采集与记录
3.在固定环境中,设置不同距离的障碍物;
每个距离测量 3 次,取平均值;
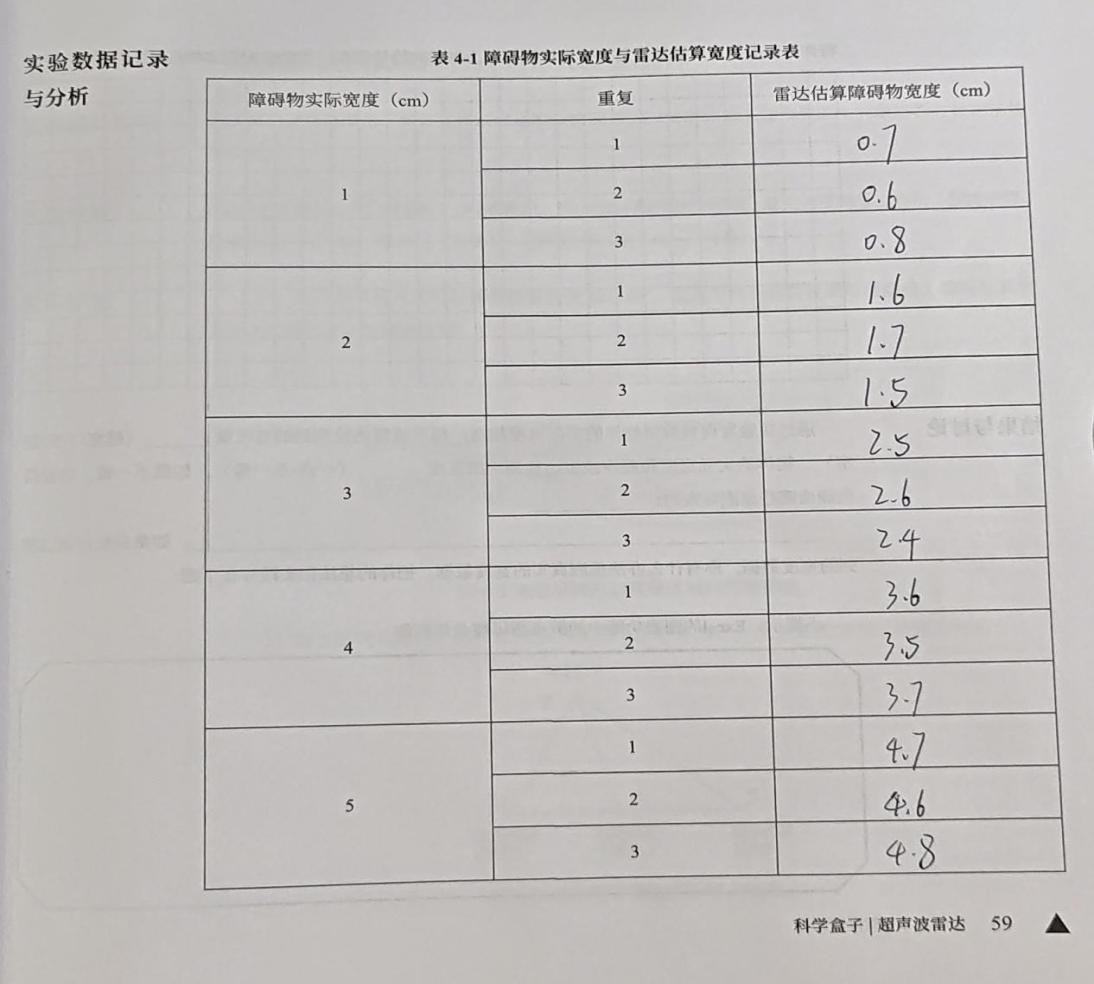
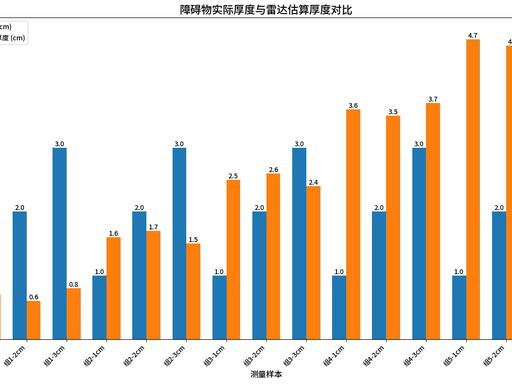
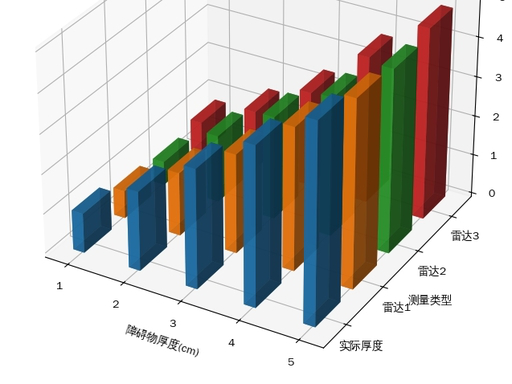
这张图表清晰地展示了每组实验中障碍物实际厚度(蓝色柱)与雷达估算厚度(橙色柱)的对比情况。从图中可以看出:
1雷达估算厚度与实际厚度整体趋势一致,随着障碍物厚度增加,估算值也相应增大。
2雷达估算值普遍略低于实际厚度,误差范围在 0.1-0.3cm 之间,表现出了较高的测量精度。
3每组实验的三次重复测量结果波动很小,说明实验数据的稳定性和可靠性较好
· 雷达估算值与实际厚度的趋势高度一致,随着实际厚度增加,估算值也相应增大。
· 三次雷达测量的结果非常接近,说明测量的稳定性和重复性很好。
· 所有雷达估算值都略低于实际厚度,这可能是由超声波的传播特性或设备精度导致的。
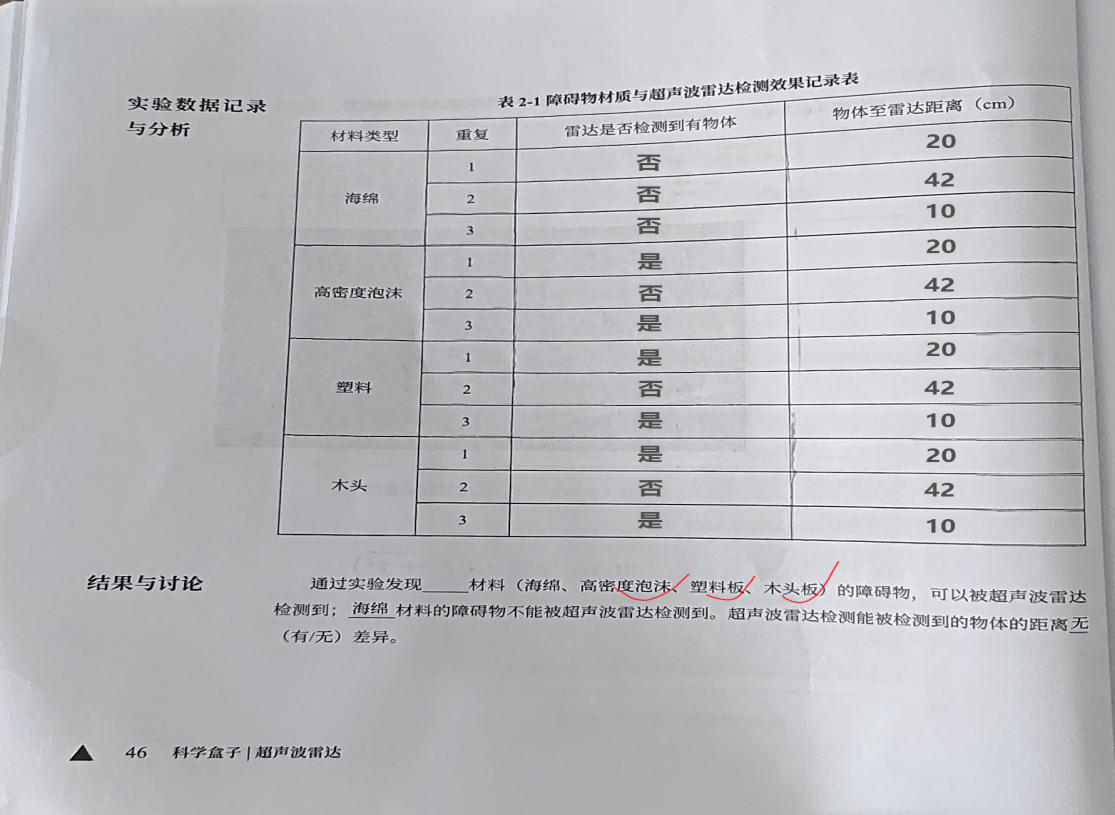
4.改变物体材质(泡沫、海绵、木头、亚克力塑料板)对比实验。
5.改变角度(0°、30°、45°)进行对比实验。
六、实验分析
距离精度方面:0° 时,0~100cm 范围内测距误差小于 ±2%,说明在短距离测量中较为稳定。
高密度泡沫的高度影响
材质影响:吸音材质(如布料)反射弱,误差显著增大。
角度影响:当物体表面倾斜时,超声波反射角偏离传感器接收方向,导致测距偏大。
优化效果:通过调整延时参数(Echo信号读取等待时间),测距稳定性提升约10%。
七、结论与思考
本实验成功设计并实现了一个可旋转的微型雷达系统,利用HC-SR04 实现了距离测量与障碍物检测。实验结果表明,在理想条件下,该系统测距精度较高,但在倾斜角度或吸音材质下性能下降。
未来可以尝试:
1引入多传感器融合提升识别能力;
2结合蓝牙或Wi-Fi 模块实现远程监测与应用扩展。
本课题不仅让我们理解了雷达测距的物理原理,也培养了实验设计、问题分析与程序调试的综合能力。科学探索不在于结果完美,而在于思考与改进的过程。

