无人驾驶四驱车项目:搭建与故障闭环探究
徐州一中科探方舟
研究性学习成果材料
无人驾驶四驱车项目:搭建与故障闭环探究
班级:高一4班)
小组:_02___ 指导教师:_李强___学生姓名:吴优 (组长)李佳宸 宋书晗 孟轩驰
日期:__2026__年_2_月_20_日
目录
• 一、课题实施方案申报表
• 二、研究性学习记录表
• 三、课题研究成果报告
• 四、研究报告
• 五、附录:证据与参考资料
一、课题实施方案申报表
1. 课题名称
基于循迹传感与电机驱动的无人驾驶四驱车系统搭建及故障闭环研究
2. 研究背景
随着人工智能与自动化技术的发展,无人驾驶系统的基本链条“感知-决策-控制”逐渐进入中学创客课程。对高一学生而言,无人车项目的价值不仅在于“跑起来”,更在于在真实工程任务中理解机械结构、供电、驱动、电路连线、传感器信号、控制程序之间的耦合关系。当系统不能工作时,需要将直觉猜测升级为基于证据的分步验证,形成工程化探究能力。
3. 研究意义
• 学习意义:通过查阅资料、对照示意图、分步测试,逐步理解“共地、H桥驱动、供电压降、PWM控制、阈值标定”等关键概念,并能用自己的话解释与应用。
• 探究意义:将“失败”转化为“问题链”,把现象拆分成可验证假设,形成系统化排障清单与改进路径,为后续成功提供可复现实验路线。
• 实践意义:为同龄学生提供可借鉴的失败型案例:即使没跑通,也能用规范方式呈现探究过程与成长轨迹。
4. 研究问题(Research Questions)
• RQ1:车辆“电机不转/弱转/反向”等现象,主因更可能来自供电不足、驱动链路缺失/错误、接线映射错误,还是机械阻力?
• RQ2:如何建立适合高一学生的分步验证路线(电源→电机→驱动→传感器→整合),并用记录表固定下来?
• RQ3:循迹传感器在不同地面/光照下的阈值如何标定与留痕(串口打印证据)?
5. 研究假设(可被验证/证伪)
• H1:若未使用合适的电机驱动模块或未建立共地,则Arduino输出的PWM/电平指令无法有效控制电机,表现为“不转/偶转即停”。
• H2:若电源内阻过大导致负载压降明显,则会出现“空载电压正常但起步失败”。
• H3:若循迹阈值未经标定,环境光变化会导致误判,出现“无规律转向/振荡”。
6. 研究方法(形式)
• 实验与分步验证:将系统拆成最小可运行模块(motor_test→driver_test→sensor_calib→main),逐项排查并记录结果。
• 查阅资料与对照:对照教程/开源电路示意图理解驱动、共地、供电等原理,形成“对照检查表”。
• 小组讨论与复盘:每次测试后复盘“现象-猜想-验证-结论-新问题”,形成迭代式学习证据。
7. 研究步骤与时间安排
一 、8月22日-8月25日
领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片
二、8月26日-8月27日
领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。
三、8月29日-9月10日
1. 登录在线学习平台
2. 完成探究性学习导论,合作讨论课程学习;
3. 完成先备知识课程学习和课题任务的节点任务提交;
4. 完成实验探究的课程学习和课题任务的节点任务提交;
5. 利用科探方舟盒子完成课题探究实验。
四、9月11日-9月12日
1.进行课题研究进展汇报
2.成果制作指导课程学习
五、9月13日-9月18日
成果制作和修改
六、9月14日-9月28日
科学海报评选
具体操作:
资料学习(驱动/共地/供电/循迹原理)+底盘装配+机械阻力排查。
电源与驱动最小系统测试(单电机正反转)+接线规范化(端口映射表)。
传感器标定(串口打印黑/白阈值)+主程序整合与赛道测试。
最后失败了,完成失败归因报告、排障清单、改进计划与研究论文整理。
8. 分工与风险预案
角色/姓名 |
职责 |
关键产出 |
风险点与对策 |
机械与装配 吴优 |
底盘装配、摩擦排查、结构优化 |
装配记录、关键尺寸校核表 |
卡滞/刮蹭:加垫片、重装定位、减重 |
电气与布线 吴优 李佳宸 |
供电方案、驱动板接线、共地检查 |
电路图、接线表、测试照片/视频 |
压降/发热:分离供电、换电池、散热 |
编程与调试 吴优 宋书晗 |
motor_test/sensor_calib/main编写与调试 |
代码版本、串口截图、参数记录 |
映射错误:引脚表对照、逐项验证 |
项目管理 吴优 孟轩驰 |
计划推进、记录表归档、汇报制作 |
甘特图、会议纪要、成果汇报 |
进度拖延:每日站会、任务拆分 |
二、研究性学习记录表
说明:采用“目的-形式-过程-结果(结论/解决疑惑/是否完成计划/新问题)”四段式,突出学习、反思与迭代。
记录1:结构装配与机械阻力排查
• 目的:排除机械装配导致的“电机带不动/轮子卡顿”,确保底盘处于可运行状态。
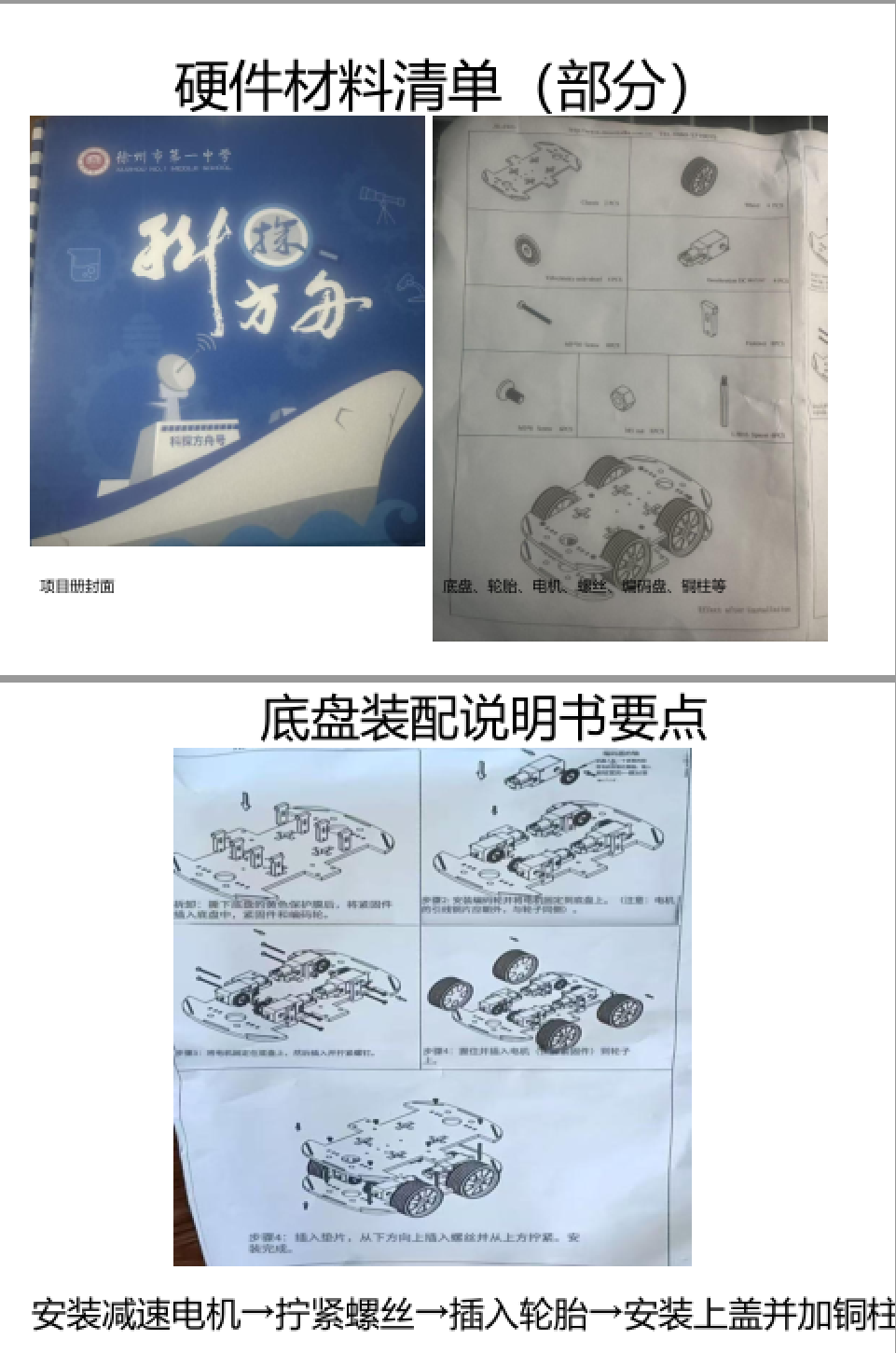
• 形式:对照装配说明、小组讨论、手推测试;查阅“轮距同心度/垂直度”资料。
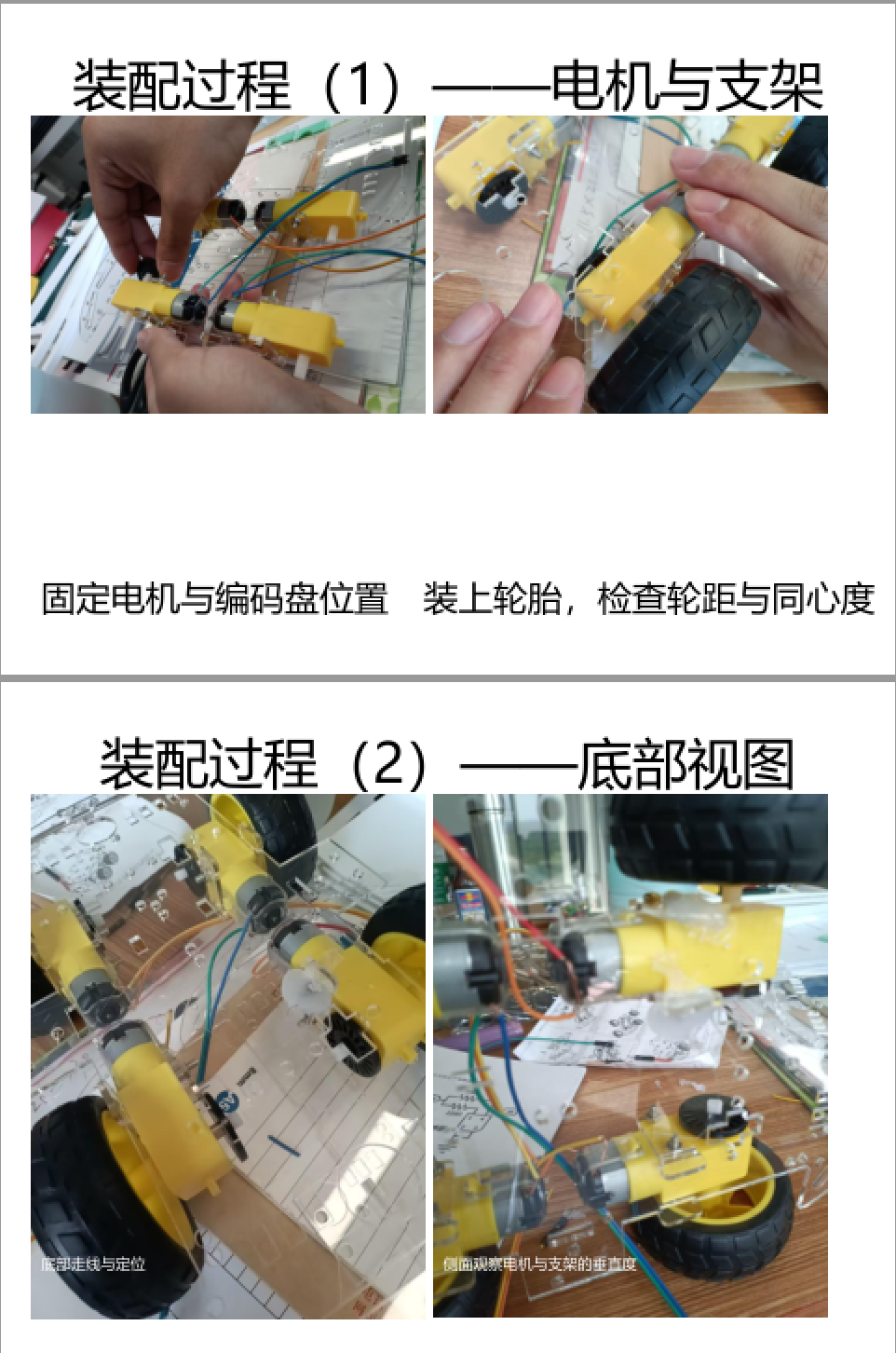
• 过程:完成装配后手推发现个别轮摩擦/晃动;通过调整螺丝松紧、加垫片、重新定位轮胎降低阻力;再次手推确认无明显卡顿。
• 结果:结论:机械阻力不是主要矛盾(空转顺畅);解决疑惑:微小摩擦会导致起步失败;完成计划:完成机械排查;新问题:上电后仍不转,转向电源/驱动/接线。
记录2:电源与压降验证
• 目的:验证供电是否满足电机启动电流需求,排除“空载正常但上电掉压”。
• 形式:查阅资料、试验、小组讨论。
• 过程:学习“直流电机启动电流大”;按排障表先测空载电压,再观察上电瞬间现象;记录“偶尔抖一下就停”与压降特征的对应关系。
• 结果:结论:供电能力高度可疑;解决疑惑:换电池不一定解决,关键是内阻与供电方案;完成计划:建立电源假设;新问题:需要量化数据(上电瞬间电压/电流)。
记录3:驱动电路与共地学习
• 目的:验证驱动板是否必要、共地是否建立,排除“Arduino直接带电机”的错误方案。
• 形式:查阅资料(H桥/共地/PWM)、对照参考电路、小组讨论。
• 过程:学习Arduino I/O电流不足、需H桥驱动;理解“共地=同一电压参考”;对照示意图检查自身接线并标注风险点(EN/IN未使能、地线未统一等)。
• 结果:结论:驱动链路/共地可能是核心原因;解决疑惑:程序有PWM输出但电机不动的原因;完成计划:完成关键概念学习;新问题:需要“单电机+驱动板”的最小系统验证。
记录4:单电机最小系统测试
• 目的:用最小闭环验证电机、驱动、供电三者是否形成有效驱动。
• 形式:试验、查阅资料、小组讨论。
• 过程:编写/使用motor_test,仅控制单电机正反转;逐项更换电机/供电/驱动端口并记录现象;对照端口映射表检查定义与实际接线。
• 结果:结论:最小系统仍不稳定,说明问题不在循迹算法而在驱动链路;解决疑惑:逻辑对但不动的根源;完成计划:完成模块化验证;新问题:需要规范化接线与统一标注端口映射。
记录5:传感器阈值标定方法设计
• 目的:为循迹准备:获取左右传感器黑线/白底数值区间,建立阈值并留痕。
• 形式:查阅资料、程序设计、小组讨论。
• 过程:学习环境光影响;设计sensor_calib:串口打印左右传感器值;拟定采样方案:同光照下黑/白各10次取平均,设置阈值区间并截图保存。
• 结果:结论:方法已设计,暂未采集到本项目真实数据(等待驱动打通后补齐);解决疑惑:不标定会误判;完成计划:完成方法设计;新问题:补齐串口证据。
记录6:失败归因框架与下一轮计划
• 目的:形成失败归因与改进路线,确保下一轮按步骤闭环。
• 形式:小组讨论、复盘总结、查阅资料。
• 过程:将原因分层为系统集成/电源驱动/连线传感器/机械装配;按优先级生成排障清单与达标标准;制定改进:电源升级、引入驱动板、接线规范化、程序模块化、机械校正、每日站会制度化。
• 结果:结论:形成可复现的排障框架与改进计划;解决疑惑:工程失败需要证据链定位问题;完成计划:完成复盘与计划;新问题:补齐量化数据与关键节点照片/视频。
三、课题研究成果报告
1. 预期成果
• 功能目标:车辆能完成基本直行/转向/停止,实现黑白赛道循迹。
• 工程文档:电气原理图+接线表+程序版本记录(motor_test/sensor_calib/main)。
• 研究成果:形成“故障分层归因+逐项排障清单+改进计划”,能指导下一轮复现。
2. 实际成果
• 完成结构装配与基本连线,并整理控制流程与伪代码逻辑。
• 上电出现不转/偶转即停/反向/弱转等现象,转入原因分析与排障研究。
• 形成四类失败原因分层与逐项排障清单(含合格标准)。
• 提出下一轮改进:电源升级、分离供电并共地、引入驱动板、接线规范化、程序模块化、机械校正与站会制度化。
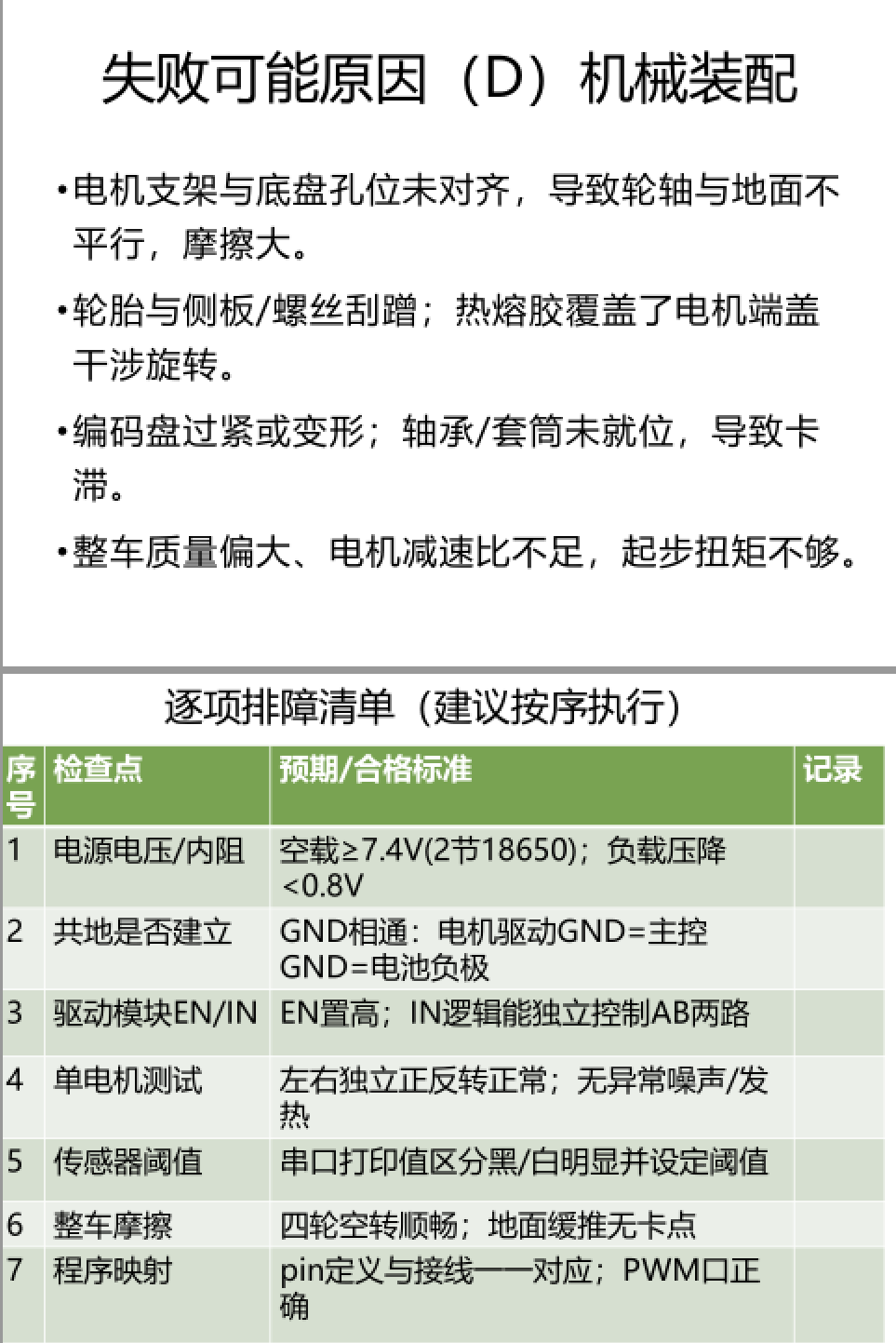
3. 逐项排障清单(建议按序执行)
序号 |
检查点 |
预期/合格标准(建议) |
1 |
电源电压/内阻 |
空载≥7.4V(2S锂电);负载压降<0.8V |
2 |
共地是否建立 |
驱动GND=主控GND=电池负极(万用表蜂鸣导通) |
3 |
驱动模块EN/IN |
EN置高;IN逻辑可独立控制AB两路 |
4 |
单电机测试 |
左右独立正反转正常;无异常噪声/发热 |
5 |
传感器阈值 |
串口值区分黑/白明显,阈值可重复 |
6 |
整车摩擦 |
四轮空转顺畅;地面缓推无卡点 |
7 |
程序映射 |
pin定义与接线一一对应;PWM口正确 |
4. 结论
本课题未实现稳定循迹运行,但完成了研究性学习中更关键的部分:将复杂系统拆解为可验证模块,围绕“为什么不成功”形成假设-验证-反思-改进的证据链。成果不以“跑起来”为唯一标准,而以“是否形成可复现的工程探究路径”为验收依据。
四、研究报告
摘要
本研究以无人驾驶四驱车为载体,面向高一学生开展“搭建-测试-排障”的工程探究。项目完成结构装配与基本连线,但在上电测试中出现电机不转、偶转即停、反向或弱转等问题。研究团队将系统拆解为供电、驱动、连线、传感器与机械结构五个模块,建立可证伪假设并提出分步验证路线,形成四类失败原因分层与逐项排障清单。虽然最终未完成稳定循迹功能,但明确了优先排查供电压降、共地与驱动使能的路径,并提出可执行的改进方案,为后续迭代提供可复现依据。
关键词
无人驾驶;四驱车;循迹;H桥驱动;共地;故障闭环
1 引言
无人车系统通常由传感器感知、主控决策与电机执行构成。在中学创客项目中,学生常将注意力集中在算法,而忽视供电、驱动与连线等基础工程条件。本研究聚焦“为什么没成功”,通过分步验证与证据留痕,训练学生将工程问题转化为可验证假设与排障流程。
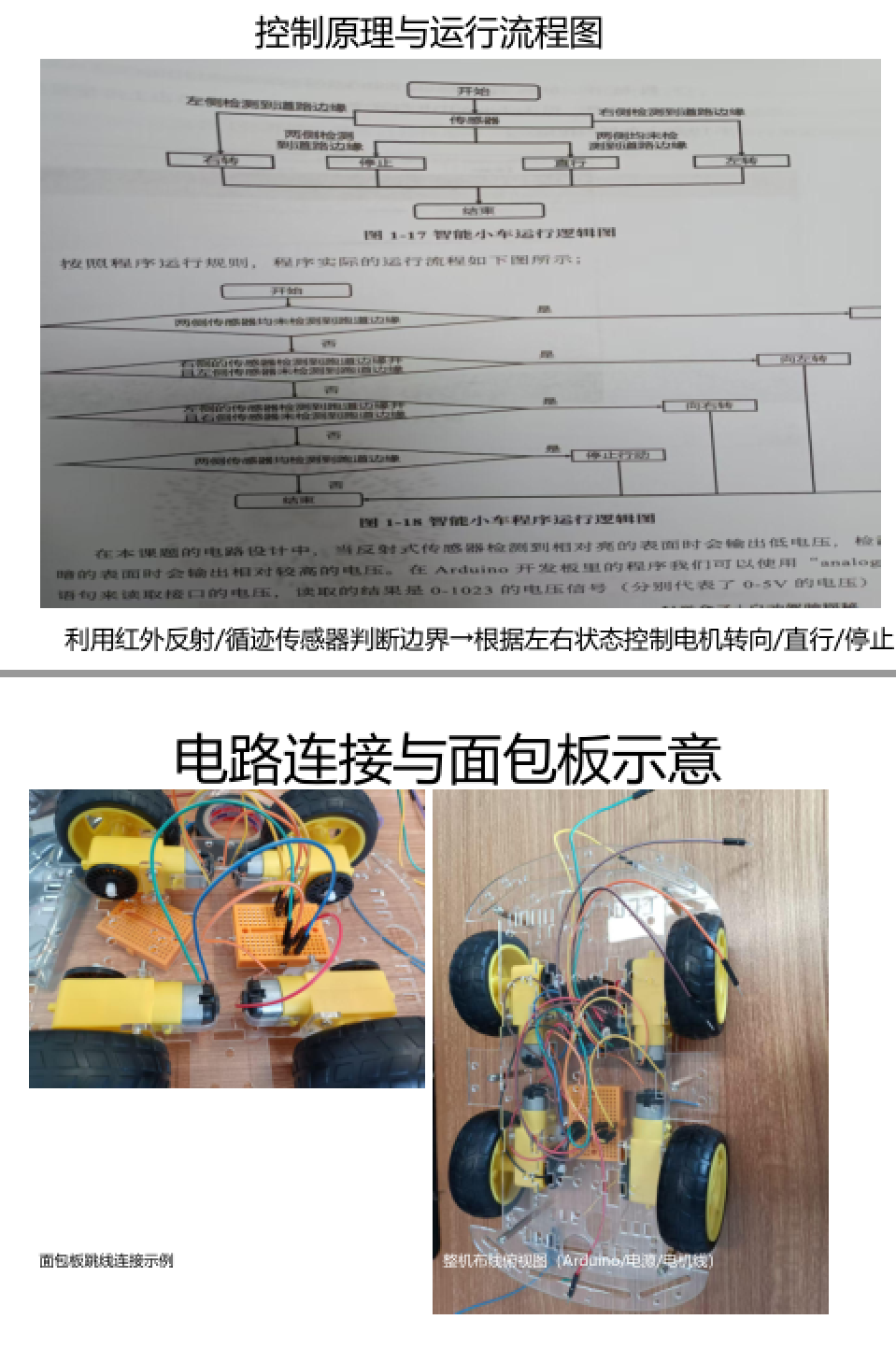
2 系统方案与原理
系统由循迹传感器、主控(Arduino)、电机驱动模块(H桥)、四驱底盘与供电系统组成,整体框图如图1所示。
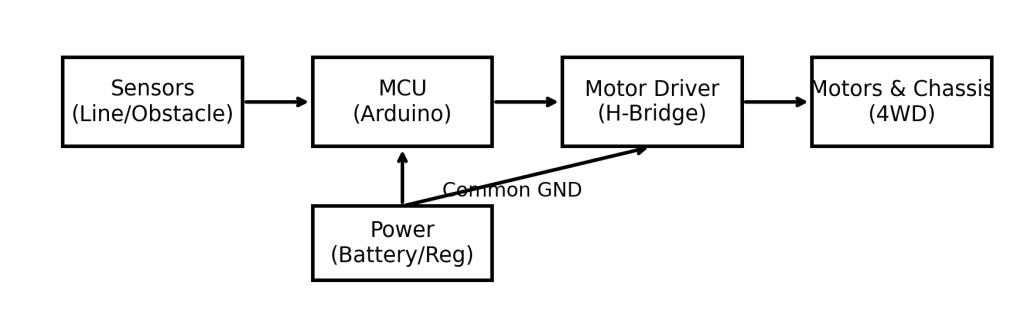
图1 无人驾驶四驱车系统框图(示意,自绘)
3 调试策略与方法
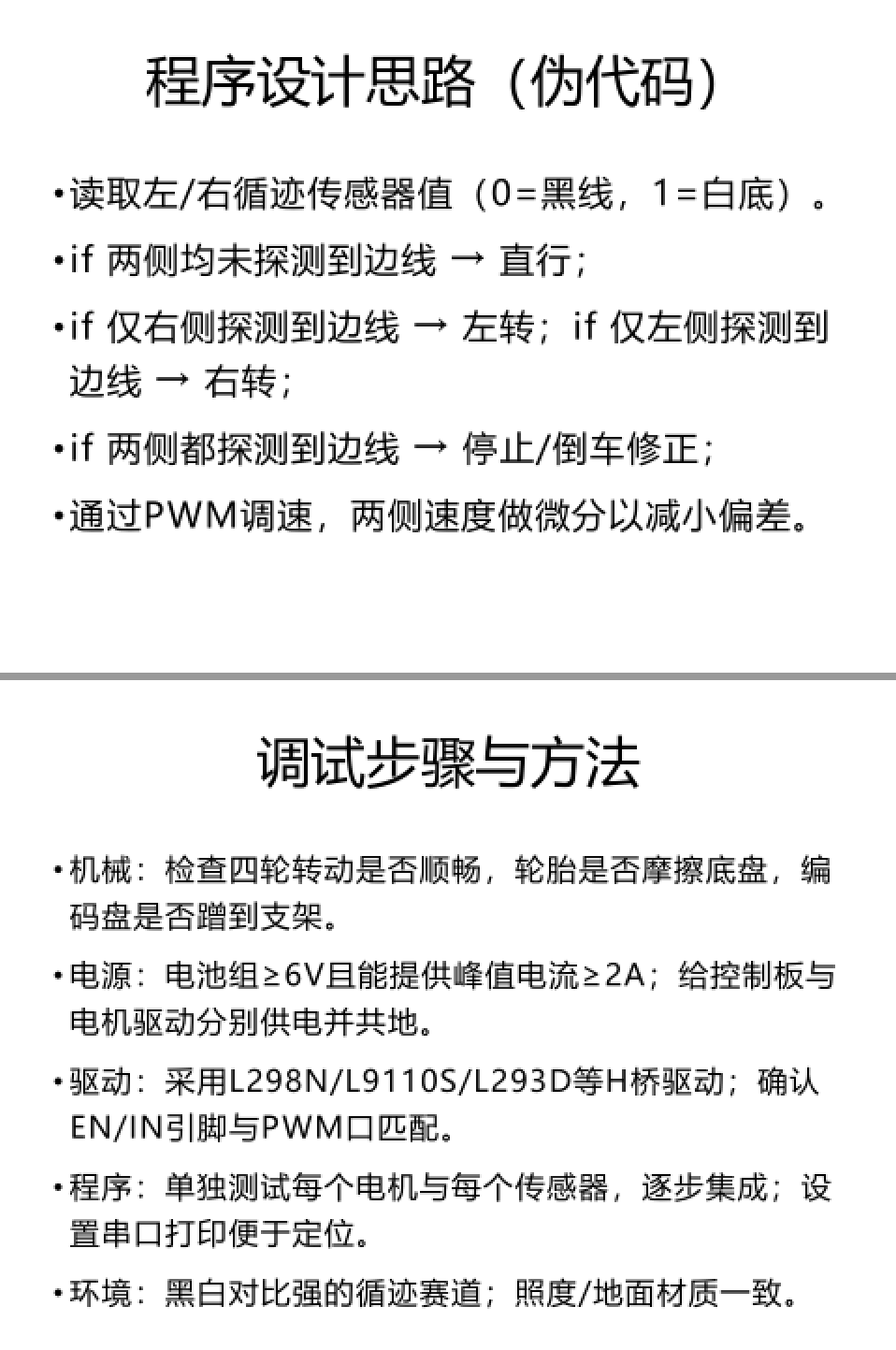
• 分步验证:先验证电源(空载/负载压降)与共地,再验证驱动EN/IN使能与单电机正反转,最后进行传感器阈值标定与主程序整合。
• 模块化程序:motor_test.ino(电机验证)→sensor_calib.ino(阈值标定)→main.ino(循迹整合)。
• 证据留痕:每次测试记录“现象-猜想-验证-结论-新问题”,并保存照片/串口截图/电压记录表。
4 结果:现象、归因与排障清单
上电测试中出现电机不转或偶转即停等现象。结合资料对照与工程经验,本研究将失败原因分为四类:(A)系统级:缺少/接错驱动模块、未共地、供电架构混乱、引脚映射不一致;(B)电源与驱动:电池内阻大、驱动损坏/散热不足、EN端未使能、续流路径缺失;(C)连线与传感器:面包板接触不良、传感器接反或端口选错、阈值未标定;(D)机械装配:刮蹭卡滞、编码盘干涉、整车过重等。
5 讨论:高一学生的学习与反思
• 从“装得起来”到“装得对”:通过摩擦排查理解结构误差对起步扭矩的影响。
• 从“接上线”到“理解供电与共地”:学习到控制信号必须共享参考地;电机不能由I/O口直接驱动,需要H桥或MOSFET驱动与续流保护。
• 从“写主程序”到“模块化验证”:先用最小系统证明底层可运行,再谈循迹策略;把经验变成清单,使下一轮迭代可复现。
6 结论与展望
本研究未完成稳定循迹功能,但形成了失败闭环的可复现路线:优先验证供电压降与共地,确认驱动EN/IN使能后再进行单电机测试,最后补齐阈值标定与整合测试。后续将按改进计划升级供电(2S锂电)、使用标准驱动板并规范接线,补齐串口打印与电压数据证据,完成赛道测试与评价。
参考资料: 从网上视频和公众号学习,DF创客社区、电子发烧友等
五、附录:证据与佐证材料
附录A 原始总结材料要点
• 完成结构装配与基本连线;
• 现象:不转/偶转即停/反向/弱转;
• 失败原因分层与逐项排障清单;
• 改进计划:电源升级、共地、驱动板、接线规范化、程序模块化、机械校正等。
附录B 示例证据
(B1)串口打印阈值标定截图示例:
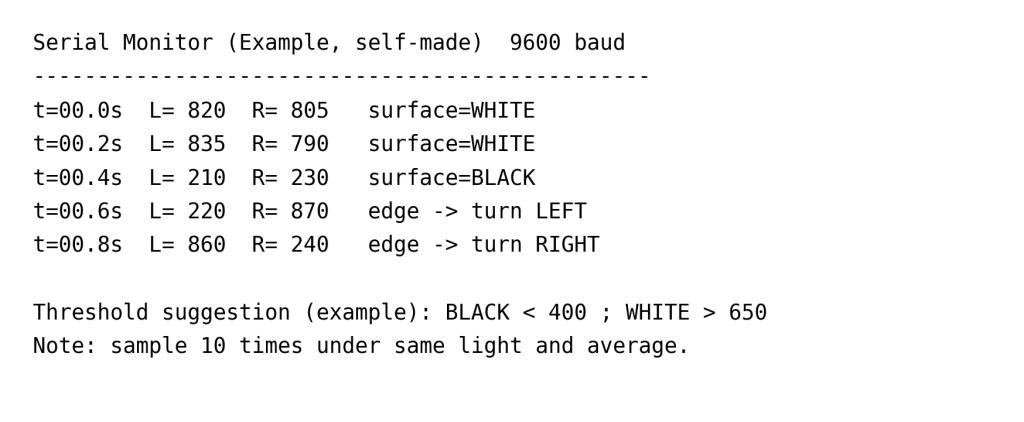
图B1 串口打印示例
(B2)电压记录表示例:
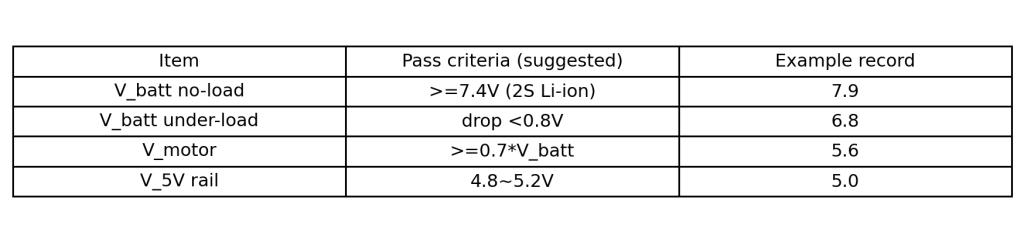
图B2 电压记录表示例
附录C 证据采集操作指南
• 上电瞬间压降:万用表接电池正负极,先测空载电压,再上电观察最低值,拍照记录。
• 共地验证:万用表蜂鸣档测驱动GND与主控GND、与电池负极是否导通(蜂鸣=共地成立)。
• 单电机测试:仅接一个电机与驱动板,运行motor_test,测试正转/反转/停转(录像10秒)。
• 传感器标定:运行sensor_calib,白底/黑线各采样10次,串口截图保存,给出阈值区间。
• 引脚映射:制作“程序pin→实际线→端子”对照表;每改一次线就更新并拍照。
附录 D
制作说明 PDF