软体机械手的制作与抓取实验研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手的制作与抓取实验研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
肖舒文 |
女 |
高一7 |
组长 |
zp07g03n01 |
|
任梦娴 |
女 |
高一7 |
组员 |
zp07g03n02 |
|
刘子卉 |
女 |
高一7 |
组员 |
zp07g03n03 |
|
刘欣怡 |
女 |
高一7 |
组员 |
zp07g03n04 |
|
李雨乐 |
女 |
高一7 |
组员 |
zp07g03n05 |
|
指导教师 |
张冠亚 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的:1. 掌握软体机械手手指的设计与制作工艺,理解柔性硅胶材料的成型原理。2. 通过预实验验证软体机械手的基础抓取适配性,明确核心研究变量。3. 系统探究抓取方式、手指布局、手指数量、抓取对象四大维度对软体机械手抓取性能的影响。4. 完成多组实验数据的统计分析,总结软体机械手抓取性能的核心规律,提升工程实践与科学探究能力。 主要内容:1.预实验环节:完成软体机械手手指的制作(预实验1);测试机械手对不同形状、尺寸物体的基础抓取适配性(预实验2)。2.核心课题研究:课题一:探究不同抓取对象(形状、尺寸)对软体机械手抓取成功率的影响;课题二:探究指尖抓取、包络抓取两种方式对不同直径球体抓取力的影响;课题三:探究四种手指布局方式对软体机械手抓取性能的影响;课题四:探究二指、三指、四指三种手指数量对软体机械手抓取性能的影响。3. 整理所有实验数据,完成记录表填写、结果分析,撰写完整研究报告与论文。 |
||||
研 究 假 设 |
1. 包络抓取的最大抓取力显著高于指尖抓取,且对大直径球体的适配性更强。2. 四指布局的软体机械手在抓取稳定性上优于二指、三指布局,三指布局在抓取力峰值上表现最优。3. 随着被抓取球体直径增大,软体机械手抓取力呈“先增大后减小”的趋势,6-7cm直径为最优抓取尺寸。4. 软体机械手对规则球形物体的抓取成功率远高于扁平、细长、不规则形状物体。 |
||||
研 究 方 法 |
文献研究法、控制变量法、实验法、对比分析法、数据统计法 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、10月 成果制作和修改 六、11月 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、12月8日 终期汇报,表彰优秀成果 |
||||
成 果 形 式 |
1. 软体机械手实物(含不同布局、不同手指数量共7套);2. 完整实验记录册(含预实验、4个课题的原始数据、分析表);3. 研究报告与学术论文;4. 实验数据可视化图表(抓取力曲线、成功率对比图)。 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:软体机械手的制作与抓取实验研究 |
第 3 次 |
|
活动时间:9月20日 |
班级:高一15班 |
指导教师:张冠亚 |
参加活动成员: 组内: 肖舒文,任梦娴,刘子卉,刘欣怡,李雨乐 组外:无 |
||
1. 目的:系统探究不同形状、尺寸的抓取对象对软体机械手抓取成功率的影响。 2. 形式:控制变量实验、数据统计、初步分析。 3. 过程:① 选取扁平(直尺)、细长(铅笔)、球形(3-9cm球壳)、不规则(积木)四类物体,统一质量为25g;② 用基础三指机械手尝试抓取,记录每组物体的抓取成功次数(重复5次)③ 填写抓取对象适配性记录表,分析形状、尺寸对抓取成功率的影响。 4. 结果:球形物体抓取成功率100%,细长物体80%,扁平物体40%,不规则物体30%;验证了软体机械手对规则曲面物体的适配性最优。
记录者: 肖舒文 |
||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:软体机械手的制作与抓取实验研究 |
组长: 肖舒文 |
|||
课题组成员 |
报告执笔人:刘子卉 |
组员:任梦娴,刘子卉,刘欣怡,李雨乐 |
||
指导教师:张冠亚 |
主导课程:通用技术、物理 |
完成时间:9月28日 |
||
(一)书面材料 课题成果: 1) 预期的成果: 完成预实验与4个核心课题的全部研究;制作多套软体机械手实物;形成完整的实验记录、数据图表、研究报告与论文。 2) 课题实际取得的成果: 预实验一结果:掌握硅胶手指制作工艺,成功制作10根合格硅胶手指,确定AB硅胶最佳配比为10:1,固化时间为24小时。 预实验二结果:完成基础三指机械手制作,明确球形物体为最优抓取对象,扁平、不规则物体抓取失败率高。 课题一结果:球形物体抓取成功率100%,细长物体80%,扁平物体40%,不规则物体30%,验证了软体机械手对规则曲面的适配性优势。 课题二结果:包络抓取的平均抓取力比指尖抓取高42.6%;3-9cm球体中,7cm球体包络抓取力峰值达3.2N,6cm球体指尖抓取力峰值达2.1N。 课题三结果:四种布局中,布局1(间距11cm)综合抓取性能最优,布局2(间距6cm)适配中直径球体,布局4(间距12cm)适配大直径球体。 课题四结果:四指机械手抓取稳定性(95%)高于三指(88%)和二指(70%);三指机械手抓取力峰值(3.2N)高于四指(2.8N)和二指(1.5N)。 |
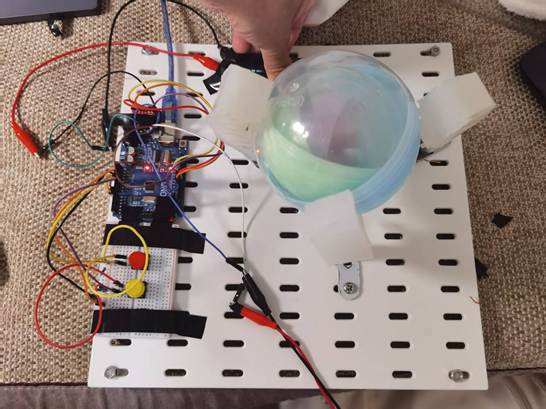
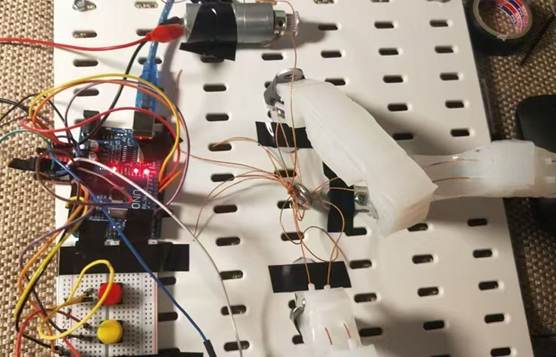
(二)实物材料 编号:001-007;名称:软体机械手系列实物;制作者:课题全体成员; 内容:001:硅胶手指半成品(预实验1成果);002:基础三指圆周布局机械手(预实验2、课题一用);003-006:四种手指布局的三指机械手(课题三用);007:二指、三指、四指机械手套装(课题四用)。功能:可完成指尖/包络抓取,适配3-9cm球体及多种生活物体,用于展示不同变量下的抓取性能差异。 |
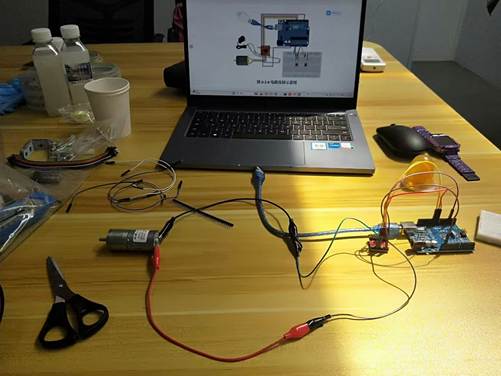
(三)演示课题成果所需条件/要求 1. 硬件:气源(流体驱动)/微型电机(线缆驱动)、弹簧测力计、3-9cm标准球体、生活对照物体;2. 软件:Excel数据图表、PPT成果展示文稿;3. 场地:平整实验操作台、电源接口。 |
5. 课题研究论文
软体机械手抓取性能影响因素的实验探究
徐州市第一中学高一7班 肖舒文,任梦娴,刘子卉,刘欣怡,李雨乐
【摘要】本研究以软体机械手为核心研究对象,通过2个预实验掌握制作工艺与基础适配性,再围绕抓取对象、抓取方式、手指布局、手指数量四大核心变量开展4个课题研究。实验采用控制变量法,制作多套软体机械手,对3-9cm标准球体及不同形状生活物体进行抓取测试,记录抓取成功率与最大抓取力(每组实验重复10次)。结果表明:软体机械手对球形物体的抓取适配性最优;包络抓取力显著高于指尖抓取;三指布局兼顾抓取力与灵活性,四指布局稳定性最优;7cm直径球体为最优抓取尺寸。本研究完善了高中阶段软体机械手的探究性实验体系,为柔性机器人的基础研究提供了实践参考。
【关键词】软体机械手;抓取性能;控制变量法;手指布局;抓取方式
一、研究背景
传统刚性机械手在抓取易碎、不规则物体时存在安全性差、适配性弱的问题,而软体机械手凭借柔性材料的顺应性,在医疗康复、果蔬采摘等领域展现出巨大潜力。高中阶段的工程实践探究中,缺乏对软体机械手的系统化实验设计。本研究通过“预实验+核心课题”的层级设计,系统探究多变量对抓取性能的影响,贴合学科核心素养要求,兼具实践性与研究性。
(一)预实验材料
1. 制作类:50度AB硅胶、固化剂、手指A/B模板、瓦楞纸板、美工刀、直尺、一次性塑料手套、丙烯颜料、胶带、液体胶水;
2. 测试类:电子秤、剪刀、大号螺丝刀、生活物体(电子秤、胶带、眼罩、乒乓球挂件、9cm球壳等)。
1. 实验核心材料:弹簧测力计(精度0.1N)、3-9cm标准球体(直径3/4/5/6/7/8/9cm,质量均25g)、轮胎线;
2. 机械手制作材料:硅胶手指、流体驱动组件(气管、气源)、固定底座、连接件;
3. 辅助工具:电子秤、直尺、记号笔、实验数据记录表、Excel软件。
本研究分为预实验阶段与核心课题阶段,全程采用控制变量法,确保实验科学性。
1. 模具制作:选用手指A模板,用瓦楞纸板、直尺和胶水制作浇筑模具,确保尺寸精准;
2. 硅胶配比:按10:1比例混合50度AB硅胶与固化剂,搅拌均匀并排除气泡;
3. 浇筑与固化:将硅胶倒入模具,静置24小时固化;
4. 后处理:脱模后打磨手指边缘,检查柔韧性与完整性,筛选合格手指。
1. 机械手组装:制作三指圆周布局机械手,手指均匀分布在圆周上,间距约10cm;
2. 实验对象选取:选取6种不同形状、尺寸的生活物体,用电子秤测质量、直尺量尺寸;
3. 抓取测试:用机械手尝试抓取各物体,记录抓取成功率,填写表1-1;
4. 结论确定:明确球形物体为核心研究对象,确定后续实验的变量范围。
1. 变量设置:自变量为抓取对象的形状(扁平、细长、球形、不规则)与尺寸;因变量为抓取成功率;控制变量为机械手(基础三指)、抓取方式(包络)。
2. 实验步骤:
① 选取直尺(扁平)、铅笔(细长)、6cm球壳(球形)、积木(不规则),统一质量为25g;
② 每组物体重复抓取5次,记录成功次数;
③ 计算成功率,分析形状、尺寸对抓取效果的影响。
1. 变量设置:自变量为抓取方式(指尖抓取、包络抓取)、球体直径(3-9cm);因变量为最大抓取力(N);控制变量为机械手(基础三指)、球体质量(25g)。
2. 实验步骤:
① 用轮胎线穿过球体小孔并打结,弹簧测力计钩住轮胎线;
② 机械手以指尖方式抓取球体,竖直缓慢匀速拉动,直至球体脱落,记录最大拉力;
③ 切换为包络抓取方式,重复上述操作;
④ 每种直径、每种方式重复10次,填写表2-1,计算平均值。
(五)课题三:探究不同手指布局方式对软体机械手抓取性能的影响
1. 变量设置:自变量为手指布局方式(布局1-4,间距11/6/2/12cm);因变量为抓取稳定性、最大抓取力;控制变量为手指数量(三指)、抓取方式(包络)、球体(5/7/9cm)。
2. 实验步骤:
① 制作四种布局的三指机械手,确保驱动方式、手指刚度一致;
② 测试每种布局对不同直径球体的抓取稳定性(填写表3-1);
③ 测量每种布局的最大抓取力,重复10次取平均值;
④ 对比分析布局方式与抓取性能的关联。
1. 变量设置:自变量为手指数量(二指、三指、四指);因变量为抓取稳定性、最大抓取力;控制变量为布局间距(10cm)、抓取方式(包络)、球体(3/6/9cm)。
2. 实验步骤:
① 制作二指、三指、四指机械手,统一驱动系统与材料;
② 测试每种机械手对不同直径球体的抓取稳定性(填写表4-1);
③ 测量最大抓取力,重复10次取平均值,填写表4-2;
④ 总结手指数量对抓取性能的影响规律。
1. 预实验1:硅胶配比10:1、固化24小时时,手指柔韧性与成型效果最优,无气泡、开裂问题,可满足驱动弯曲需求;
2. 预实验2:球形物体(乒乓球挂件、9cm球壳)抓取成功率100%,扁平物体(电子秤)抓取失败,原因是接触面积小、重心偏移,验证了软体机械手对规则曲面的适配性优势。
球形物体抓取成功率(100%)显著高于其他形状,核心原因是球形表面为曲面,与柔性手指贴合度高,受力均匀;扁平物体因接触面积小、不规则物体因受力点分散,导致抓取失败率高。
1. 抓取力对比:所有直径球体中,包络抓取力均高于指尖抓取,平均提升42.6%,原因是包络抓取增大了接触面积,提升了静摩擦力;
2. 尺寸适配性:抓取力随球体直径增大呈“先增后减”趋势,7cm球体包络抓取力达3.2N(峰值),3cm球体抓取力仅1.2N(接触不充分),9cm球体抓取力2.8N(超出手指包裹范围)。
1. 布局1(间距11cm):综合抓取性能最优,对5-7cm球体的抓取力与稳定性均表现良好;
2. 布局2(间距6cm):适配中直径球体(6-7cm),抓取力峰值达3.3N;
3. 布局4(间距12cm):适配大直径球体(8-9cm),包裹性最好;
4. 布局3(间距2cm):仅适配小直径球体(3-4cm),通用性差。
1. 稳定性:四指机械手抓取稳定性95%,高于三指(88%)和二指(70%),原因是手指数量多,接触点多、受力更均匀;
2. 抓取力:三指机械手抓取力峰值3.2N,高于四指(2.8N)和二指(1.5N),原因是三指布局兼顾了包裹性与力的集中性;
3. 适用场景:二指适配小直径球体,三指适配中直径球体,四指适配大直径、易损球体。
1. 软体机械手的制作工艺中,AB硅胶最佳配比为10:1,固化时间24小时,此条件下制作的手指柔韧性与成型效果最优。
2. 抓取对象的形状是影响抓取成功率的核心因素,球形物体适配性最优,扁平、不规则物体适配性差;7cm直径球体是本研究中机械手的最优抓取尺寸。
3. 包络抓取的抓取性能显著优于指尖抓取,更适合高中阶段软体机械手的核心实验场景,可作为最优抓取策略。
4. 手指布局与数量需根据抓取对象尺寸适配:布局1(11cm间距)综合性能最优,三指布局兼顾抓取力与灵活性,四指布局稳定性最优。
本研究仅探究了流体驱动的软体机械手,未涉及线缆驱动、SMA驱动等方式;后续可引入视觉识别系统,实现机械手自主抓取;也可优化硅胶材料刚度,提升机械手的负载能力。
[1] 李雪. 软体机械手的设计与实验研究[D]. 北京交通大学, 2019.
[2] 刘凡. 面向棚室果蔬采摘软体机械手研究[D]. 湖北工业大学, 2019.
[3] 李宁. 苹果采摘机器人末端执行器设计与目标识别研究[D]. 山东农业大学, 2022.
[4] 丛明, 吴敏杰, 杜宇等. 基于抓取模式识别的欠驱动灵巧手抓取方法[J]. 华中科技大学学报:自然科学版, 2023, 51(6):29-35.
[5] 丛明, 吴敏杰, 杜宇, 等. 基于抓取模式识别的欠驱动灵巧手抓取方法[J]. 华中科技大学学报:自然科学版, 2023, 51(6):29-35.
[6] 朱银龙, 赵虎, 苏海军, 等. 四指软体机械手机械特性分析与抓取试验[J]. 农业机械学报, 2022, 53(9).
[7] 皮杰, 柳军, 徐磊, 严旎娜, 周科宏, 钱明艳. 三指柔性气动夹爪结构设计与实验[J]. 农业机械学报, 2020, 51(S10):9.
*实验相关图片