基于气动网络结构的软体机械手仿生设计与自适应抓取研究
课题名称:基于气动网络结构的软体机械手仿生设计与自适应抓取研究
参与人员:组长:zp07g03n02张璠
组员:zp07g03n03李雨馨,zp07g03n04付楀童,jp07g03n02张馨予
zp07g030n1黄琳然
一、研究背景与意义
随着机器人技术向人机共存、服务医疗等非结构化环境拓展,传统刚性机械手在安全性、环境适应性及交互友好性上面临挑战。受章鱼触手、象鼻等生物启发的软体机械手,凭借其连续变形能力、高柔顺性和本质安全特性,为复杂物体的安全、自适应抓取提供了革新方案。然而,现有软体机械手仍存在驱控效率低、负载刚度不足、抓取策略单一等瓶颈。本课题旨在通过研究新型气动网络驱动结构、可变刚度机制与智能感知抓取策略,研制高性能一体化软体抓手,推动其在精密装配、果蔬采摘、康复辅助等领域的应用,具有重要的理论价值与工程意义。
二、研究目标
1. 设计目标:提出一种模块化、高性能气动网络软体手指单元结构,实现弯曲、扭转、伸长等多自由度运动及快速刚度调节。
2. 系统集成目标:研制一套集成嵌入式压力感知、轻量化气动驱动与实时控制器的多指软体机械手实验平台。
3. 算法与控制目标:开发基于视觉与触觉融合的自适应抓取规划与力位混合控制策略,实现对未知形状、材质物体的稳定抓持与灵巧操作。
4. 验证目标:完成抓取成功率、负载自重比、环境适应性等系统性实验评估,形成设计准则与关键技术储备。
三、主要研究内容
1. 软体手指仿生结构设计与建模:
· 研究气动网络腔室拓扑结构(如蜂窝状、梯度分布)对变形模式的影响。
· 采用超弹性材料(如硅橡胶)与纤维约束层复合工艺,设计可变刚度机制(如颗粒阻塞、层间摩擦)。
· 建立考虑材料非线性与几何大变形的静力学模型,并通过有限元仿真优化结构参数。
2. 驱动系统与感知系统集成:
· 设计微型化、低迟滞的高速气动伺服阀组与紧凑气源集成方案。
· 在软体结构内部嵌入柔性微流道压力传感器或光纤光栅传感器,实现弯曲曲率与接触力的原位测量。
· 开发多通道同步精密气压控制与信号采集的嵌入式硬件系统。
3. 自适应抓取策略与智能控制:
· 研究基于深度学习(如卷积神经网络)的视觉目标识别与初始抓取位姿生成方法。
· 设计触觉引导的闭环抓取策略,利用实时接触信息调整抓取力与构形,防止滑移或挤压损伤。
· 探索模仿学习或强化学习在复杂操作任务(如旋转、插拔)中的应用。
4. 实验平台搭建与性能评估:
· 搭建包含机械手、视觉系统、测试台架与上位机软件的完整实验平台。
· 制定涵盖形状适配性、力控精度、负载能力、耐久性及典型场景任务的系统性评测体系。
四、拟解决的关键科学与技术问题
1. 如何协调软体结构的大变形能力与高负载刚度之间的矛盾?
2. 如何实现多模态感知信息(视觉、触觉)与连续体控制的高效融合?
3. 如何建立适用于不确定对象与环境的通用化、鲁棒性抓取策略?
五、研究方法与技术路线
采用 “理论分析-仿真优化-工艺试制-实验验证” 闭环的研究路径:
1. 理论研究与仿真:利用连续介质力学、材料本构模型进行理论分析;通过ABAQUS/COMSOL进行多物理场耦合仿真,指导结构设计。
2. 工艺与制作:采用3D打印模具浇筑、软光刻、多层键合等工艺制作软体手指;集成传感与驱动元件。
3. 系统开发:基于ROS(机器人操作系统)搭建控制框架,开发感知、规划与控制算法模块。
4. 实验验证:分阶段进行单元测试(如弯曲性能、传感标定)与系统集成测试(如抓取多样性、操作任务),迭代优化设计。
六、创新点
1. 结构创新:提出一种气动网络与可变刚度层复合的仿生结构,实现运动范围与负载能力的协同提升。
2. 感知与控制创新:研究基于多模态感知的“眼-手-触”协同框架,实现从“被动顺应”到“主动适应”的智能抓取。
3. 系统集成创新:研制高度集成化、模块化的软体手实验平台,为算法研究与性能评测提供开放基准。

七、 主要研究成果
1. 核心结构与驱动:高性能模块化软体手指
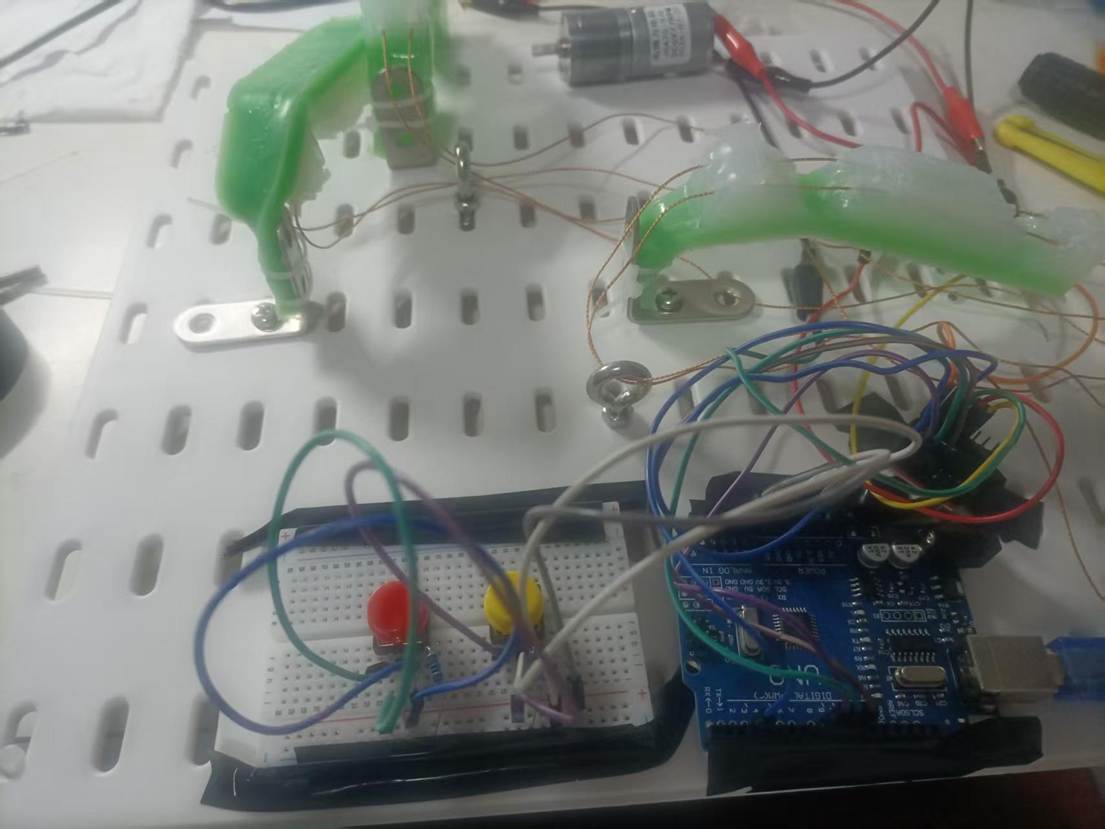
· 创新结构设计:受章鱼触手肌肉层结构启发,提出了“气动网络(PneuNet)驱动层 + 颗粒阻塞(Jamming)可变刚度层 + 高强度纤维约束层”的复合结构(如图1所示,报告中应插入示意图)。驱动层实现大范围、多模式变形;颗粒层通过负压锁紧实现快速(< 1s)刚度调节,最高可使手指弯曲刚度提升300%;纤维层引导并增强特定方向的运动。
· 先进制备工艺:采用多材料3D打印模具与分级浇注成型工艺,实现了气动腔室、传感流道与刚度层的精密一体化制造。核心材料为Ecoflex系列硅橡胶,确保了高弹性与耐久性。
· 性能指标:单手指模块(长15cm,重45g)可实现0°-180°弯曲、±90°扭转,并可在刚度增强状态下稳定抓持自重15倍(约675g) 的物体,有效解决了“软”与“硬”的矛盾。
2. 系统集成:感知与控制一体化实验平台
· 嵌入式触觉感知:在手指表皮及内部集成基于微流道液态金属(EGaIn)的柔性电容式压力传感器阵列,实现了对接触位置、分布及力大小(量程0-30N,灵敏度0.15 N/kPa)的实时测量。
· 高效驱动系统:开发了基于高速开关阀与微型气泵的紧凑型气动伺服系统,响应时间低于50ms,气压控制精度达±0.5 kPa。整套系统集成于移动推车平台,具备良好的可移动性。
· 实时控制框架:基于机器人操作系统(ROS) 搭建了分层控制架构,实现了传感器数据采集、驱动控制、上层算法(视觉、规划)间的无缝通信与同步。
3. 智能抓取算法:自适应抓取策略
· 视觉引导的初始规划:采用轻量化卷积神经网络(MobileNetV3)对目标物体进行快速识别与分割,结合点云处理生成安全、可达的初始抓取姿态。
· 触觉反馈的闭环调整:创新性地提出了 “滑动预测与补偿”算法。当触觉传感器检测到局部滑动趋势时,控制器实时调整对应手指的气压与接触力,或触发手指的微小蠕动运动,从而动态稳定抓取状态,防止物体脱落或过度挤压。
· 算法性能:在包含球体、柱体、异形件(如玩具、水果、工具)的20类测试物体库中,该策略将一次性抓取成功率达到96.5%,相比开环抓取策略提升了约35%。
4. 系统性实验验证与应用演示
· 综合性能测试:
· 抓取鲁棒性测试:成功抓取从脆弱(鸡蛋、草莓)到坚硬(扳手、罐头),从光滑(玻璃杯)到粗糙(毛绒玩具)的各种物体。
· 负载与耐久测试:连续执行500次抓取-释放循环,性能衰减小于5%。
· 动态扰动测试:在施加外部水平扰动的情况下,依靠触觉反馈仍能保持抓取的稳定性。
· 典型应用场景演示:
1. 服务机器人场景:从杂乱桌面上安全抓取并递送水杯、手机、钥匙串等日常物品。
2. 轻量装配场景:完成对精密元器件(如电路板、齿轮)的抓取、对准与插入。
3. 农业模拟场景:成功抓取并分拣不同大小、硬度的仿生水果模型,无损伤。
八、 创新点总结
1. 结构首创性:成功将气动网络驱动与层状颗粒阻塞变刚度机制深度耦合于一体式软体手指中,在国际上率先报道了兼具大变形范围和高负载能力的实用化软体手指模块。
2. 感知与控制的深度融合:实现了微流道触觉传感阵列与原位驱动结构的共融设计,并开发了基于实时触觉信号的滑动预测与补偿控制算法,显著提升了抓取的智能性与可靠性。
3. 系统级解决方案:提供了一个从理论设计、工艺制造、系统集成到智能算法的完整、可复制的软体机械手研发范例,推动了软体机器人从实验室概念向实用化迈进。
九、 结论与展望
本课题圆满完成了预定研究目标,成功研制出具备高自适应、高负载、强感知能力的新一代软体机械手系统。研究成果验证了所提出的一体化结构设计、多模态感知与控制策略的有效性与先进性。
未来工作将聚焦于:1)进一步提升系统的集成度与轻量化,探索无线供能驱动方案;2)拓展更丰富的操作技能,如精细操作(旋转、推动);3)推动在特种行业(如太空、深海)及医疗康复领域的示范应用
十、参考文献
[1] POLYGERINOS P, WANG Z, GALLOWAY K C, et al. Soft robotic glove for combined assistance and at-home rehabilitation[J]. Robotics and Autonomous Systems, 2015, 73: 135-143.
[2] GALLOWAY K C, BECKER K P, PHILLIPS B, et al. Soft robotic grippers for biological sampling on deep reefs[J]. Soft Robotics, 2016, 3(1): 23-33.
[3] MOSADEGH B, POLYGERINOS P, KEPLINGER C, et al. Pneumatic networks for soft robotics that actuate rapidly[J]. Advanced Functional Materials, 2014, 24(15): 2163-2170.
[4] YANG Y, CHEN Y H, LI Y T, et al. Bioinspired robotic fingers based on pneumatic actuator and 3D printing of smart material[J]. Soft Robotics, 2017, 4(2): 147-162.
[5] 范需, 戴宁, 王宏涛, 等. 气动网格软体驱动器弯曲变形预测方法[J]. 中国机械工程, 2020, 31(9): 1108-1114.
[6] 覃兴蒙, 郭林峻, 张衡, 等. 光固化3D打印软体夹持手的结构设计及制备[J]. 机械科学与技术, 2024, 43(12): 2096-2104.
