无人探测雷达研究探索
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
无人探测雷达研究探索 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
姜冠宇 |
男 |
高一14 |
组长 |
zp06g04n03#01 |
|
李博睿 |
男 |
高一14 |
组员 |
zp06g04n03#02 |
|
戚瑞洋 |
男 |
高一14 |
组员 |
zp06g04n03#03 |
|
张一鸣 |
男 |
高一14 |
组员 |
zp06g04n03#04 |
|
指导教师 |
刘晓涵 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
研究目的: 依托科探方舟超声波雷达科学盒子,系统探究超声波雷达的核心探测特性,掌握HC-SR04超声波传感器实操、Arduino程序编写、相控阵雷达模拟等技术;明确不同外界因素对超声波雷达识别效果的影响规律,完成基于三角测距法的障碍物方位指示装置制作与调试,深化对雷达探测技术原理的理解,提升工程制作、实验探究与数据分析的综合能力。
主要内容: 实验一、探究被测物材质(海绵、高密度泡沫、塑料板、木头板)对超声波雷达识别效果的影响,明确不同材质的可检测性及探测距离差异; 实验二、探究被测物摆放角度对超声波雷达识别效果的影响,确定雷达可有效探测的角度范围,掌握雷达视角的精准测量方法; 实验三、探究被测物实际宽度对超声波雷达检测宽度的影响,分析雷达估算宽度与实际宽度的偏差规律及成因; 实验四、基于三角测距法,利用HC-SR04传感器与Arduino开发板搭建障碍物方位指示装置,完成电路连接、程序编写与多版本程序调试优化; 实验五、利用Matlab的Sensor Array Analyzer工具模拟均匀线性相控阵雷达,探究天线阵列元素数量对雷达主瓣波束宽度的影响,明确二者关联规律。 |
||||
研 究 假 设 |
1、超声波雷达对硬质致密材质(塑料板、木头板)的识别效果好,可精准检测且探测距离误差小;对多孔疏松材质(海绵、高密度泡沫)识别效果差,甚至无法检测; 2、被测物与雷达的夹角在0°-60°范围内时,雷达可有效检测并精准识别视角;夹角超过60°后,雷达检测效果显著下降甚至无法检测; 3、被测物的实际宽度与超声波雷达检测宽度呈正相关,实际宽度越宽,雷达检测宽度越宽,二者存在固定偏差且偏差可通过数据拟合修正; 4、基于三角测距法搭建的障碍物方位指示装置,经多版本程序调试后,可实现0-40cm范围内障碍物方位与距离的精准检测; 5、均匀线性相控阵雷达的天线阵列元素数量与主瓣波束宽度呈负相关,天线数量越多,主瓣波束宽度越窄,雷达定向探测精准度越高。 |
||||
研 究 方 法 |
实验法(控制变量法开展雷达探测特性实验、装置搭建与程序调试实验、Matlab相控阵雷达模拟实验); 工程制作法(完成超声波雷达障碍物方位指示装置的组装、电路连接、Arduino程序编写); 数据分析法(实验数据统计、雷达探测偏差分析、Matlab模拟结果量化分析,用统计图呈现规律); 文献研究法(查阅超声波雷达、相控阵雷达、Arduino开发相关资料); 小组讨论法(实验设计、问题分析、装置优化与成果梳理)。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:无人探测雷达研究探索 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:刘晓涵 |
班级:高一14班 |
||
参加活动成员: 姜冠宇 戚瑞洋 李博睿 张一鸣 |
|||
活动内容: 1)目的(解决什么问题): 活动内容 1、目的:汇总分析被测物材质、角度、宽度对超声波雷达探测效果的实验数据,解决装置调试中程序版本迭代的核心问题,确定相控阵雷达模拟的关键参数设置。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验数据复盘、程序调试问题研讨、Matlab模拟参数优化、小组讨论分析。 3)过程: ①组员各自汇报所负责实验的数据分析结果,分享雷达探测特性的核心发现; ②集中研讨障碍物方位指示装置的程序调试问题,梳理多版本程序的迭代思路与改进方向; ③共同优化Matlab相控阵雷达模拟的参数设置,验证天线数量与主瓣波束宽度的关联假设; ④查阅超声波雷达技术资料,结合实验结果形成统一的研究结论。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ** Expression is faulty **结论:塑料板、木头板等硬质材质是超声波雷达的易检测材质,海绵/高密度泡沫为难检测材质;雷达有效探测角度范围为0°-60°,被测物实际宽度与雷达检测宽度呈正相关;天线数量越多,相控阵雷达主瓣波束宽度越窄,定向精度越高; ②解决问题:明确了装置程序调试的核心优化点,解决了雷达探测距离偏差、方位识别不准的问题;掌握了用CorelDRAW/PPT测量雷达视角、用公式计算实际探测距离的实操方法; ③完成预定目标,达成所有研究假设;新问题:雷达对极窄(<1cm)被测物的检测精度低,相控阵雷达模拟中天线间距对探测效果的影响尚未明确,需进一步探究。 记录者: 姜冠宇 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 无人探测雷达研究探索 |
编号: |
||||
课题组成员 |
组长:姜冠宇 |
组员:戚瑞洋 李博睿 张一鸣 |
|||
指导教师:刘晓涵 |
报告执笔人: 姜冠宇 |
完成时间:9月28日 |
|||
主导课程:声呐雷达研究 |
相关课程:物理学、电子信息技术、工程制作、数据统计 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 ①完成材质、角度、宽度对超声波雷达探测影响的三大实验,明确雷达核心探测特性; ②搭建基于三角测距法的障碍物方位指示装置,完成程序编写与多版本调试,实现精准探测; ③完成Matlab相控阵雷达模拟实验,明确天线数量与主瓣波束宽度的关联规律; ④形成完整的实验数据记录与研究结论,完成科技论文与成果海报制作。 2) 课题实际取得的成果: 实验一(被测物材质对雷达识别效果的影响) 塑料板、木头板可被超声波雷达100%精准检测,20cm预设距离下探测误差≤1cm;高密度泡沫检测成功率约50%,探测误差≥5cm;海绵无法被雷达检测,因多孔结构对超声波具有强吸收性,无有效反射信号。 实验二(被测物角度对雷达识别效果的影响) 0°-60°夹角范围内,雷达可有效检测被测物,视角测量误差≤3°;60°-75°夹角时,检测成功率骤降,信号微弱且视角偏差大;>75°夹角时,雷达完全无法检测,因超声波反射信号超出传感器接收范围。 实验三(被测物宽度对雷达识别效果的影响) 被测物实际宽度从1cm增加至5cm时,雷达检测宽度同步从0.8cm增加至4.7cm,二者呈显著正相关,整体偏差约0.2-0.3cm,偏差成因主要为雷达探测视角与被测物边缘反射信号干扰。 实验四(障碍物方位指示装置制作与调试) 基于HC-SR04传感器、Arduino开发板与三角测距法,成功搭建障碍物方位指示装置,完成5版程序迭代调试;装置可稳定实现0-40cm范围内障碍物的方位与距离检测,方位误差≤5°,距离误差≤2cm,舵机可精准指向障碍物方位。 实验五(相控阵雷达Matlab模拟) 利用Matlab Sensor Array Analyzer完成均匀线性相控阵雷达模拟,天线数量从2增加至64时,雷达主瓣波束宽度持续收窄,从60°降至8°,验证了天线数量与主瓣波束宽度的负相关规律,为提升雷达定向精度提供了技术依据。 |
|||||
参考书目及资料: 1、《科探方舟超声波雷达科学盒子实验手册》 2、《HC-SR04超声波传感器实操指南》 3、《Arduino开发板程序编写基础教程》 4、《Matlab Sensor Array Analyzer相控阵雷达模拟教程》 5、《超声波探测技术原理与应用》 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1份)、材质/角度/宽度雷达探测实验数据记录表(3份)、装置程序调试记录(1份)、Matlab相控阵雷达模拟数据记录表(1份)、实验操作与装置演示照片/视频(1套) |
|||||
(二) 实物材料,如制作的图片,模型,照片,事物样本,音像资料等 1、编号:KT-01 名称:超声波雷达障碍物方位指示装置 制作者:姜冠宇、李博睿 内容:含HC-SR04超声波传感器(2个)、Arduino UNO开发板、SG90舵机、亚克力支架,配套调试完成的Arduino探测程序,含电路连接示意图 功能:实现0-40cm范围内障碍物的方位识别与距离探测,舵机精准指向障碍物位置 2、编号:KT-02 名称:课题研究科学海报 制作者:戚瑞洋、张一鸣 内容:含五大实验设计、核心数据图表、装置实物图、相控阵雷达模拟结果、研究核心结论 功能:课题成果可视化展示,清晰呈现超声波雷达探测特性与装置制作亮点 |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): 1、硬件:多媒体设备(播放PPT、实验/装置演示视频)、制作完成的超声波雷达障碍物方位指示装置(含电源)、实验对照样本(海绵、高密度泡沫、塑料板、木头板)、量角器/直尺(现场演示角度/宽度探测); 2、软件:电脑(预装Matlab,现场展示相控阵雷达模拟过程与结果); 3、场地:需预留1m×1m无遮挡演示区域,保证雷达探测无外界干扰; 4、其他:实验数据记录表、装置程序代码打印稿(供专家查阅)。 |
|||||
4.聚焦科学技术——无人声呐雷达研究
徐州市第一中学高一14班 姜冠宇 张一鸣 李博睿 戚瑞洋
【摘要】
本研究依托科探方舟超声波雷达科学盒子,通过五大核心实验系统探究超声波雷达的探测特性,明确被测物材质、角度、宽度对雷达识别效果的影响规律,完成基于三角测距法的障碍物方位指示装置的搭建与调试,并利用Matlab实现相控阵雷达的模拟研究。实验结果表明,超声波雷达对硬质致密材质识别效果最优,有效探测角度为0°-60°,被测物实际宽度与雷达检测宽度呈显著正相关;搭建的装置可实现0-40cm范围障碍物精准探测,相控阵雷达天线数量与主瓣波束宽度呈负相关。本研究掌握了超声波雷达核心实操与开发技术,为雷达技术的基础应用与创新探究提供了实践依据。
【关键词】
超声波雷达;探测特性;三角测距法;装置制作;相控阵模拟
一、研究背景
超声波探测技术因操作简便、成本低廉、实时性强的特点,在障碍物检测、距离测量、环境感知等领域应用广泛,是无人探测技术的重要组成部分。HC-SR04超声波传感器作为基础探测元件,被广泛应用于科普实验与工程实践中,通过对其探测特性的探究,能直观理解超声波雷达的工作原理。
现阶段,关于超声波雷达的基础探究多聚焦于单一因素对探测效果的影响,缺乏多变量系统分析与实际装置制作的结合。本研究以科探方舟超声波雷达科学盒子为载体,通过控制变量法探究材质、角度、宽度三大因素对雷达识别的影响,结合Arduino开发板完成障碍物方位指示装置制作,并利用Matlab模拟相控阵雷达,实现从原理探究到装置制作再到技术深化的完整研究过程,旨在提升综合实验与工程创新能力,深化对超声波探测技术的理解与应用。
二、实验材料
1、实验耗材
海绵、高密度泡沫、亚克力塑料板、木头板、热熔胶棒、杜邦线、透明胶带
2、实验仪器
HC-SR04超声波传感器(2个)、Arduino UNO开发板、SG90舵机、亚克力支架、裁纸刀、螺丝刀、量角器、直尺、电子秤
3、软件与工具
电脑(预装Arduino IDE、Matlab2014b及以上、CorelDRAW、PPT+islide插件)、方口数据线、热熔胶枪
三、研究过程
本研究共设计五大实验,依次探究超声波雷达探测特性、完成装置制作与相控阵模拟,所有实验均采用控制变量法,保证单一变量变化,其余条件一致,实验数据均重复测量3次,取平均值以减小误差。
课题一、被测物材质对超声波雷达识别效果的影响
实验目的
探究海绵、高密度泡沫、塑料板、木头板四种不同材质对超声波雷达识别效果的影响,明确不同材质的可检测性及探测距离偏差规律。
实验步骤
1. 用裁纸刀将海绵、高密度泡沫裁成5×10×1.5cm的立方体,塑料板、木头板制作成同等尺寸的平板装置,用热熔胶固定成型;
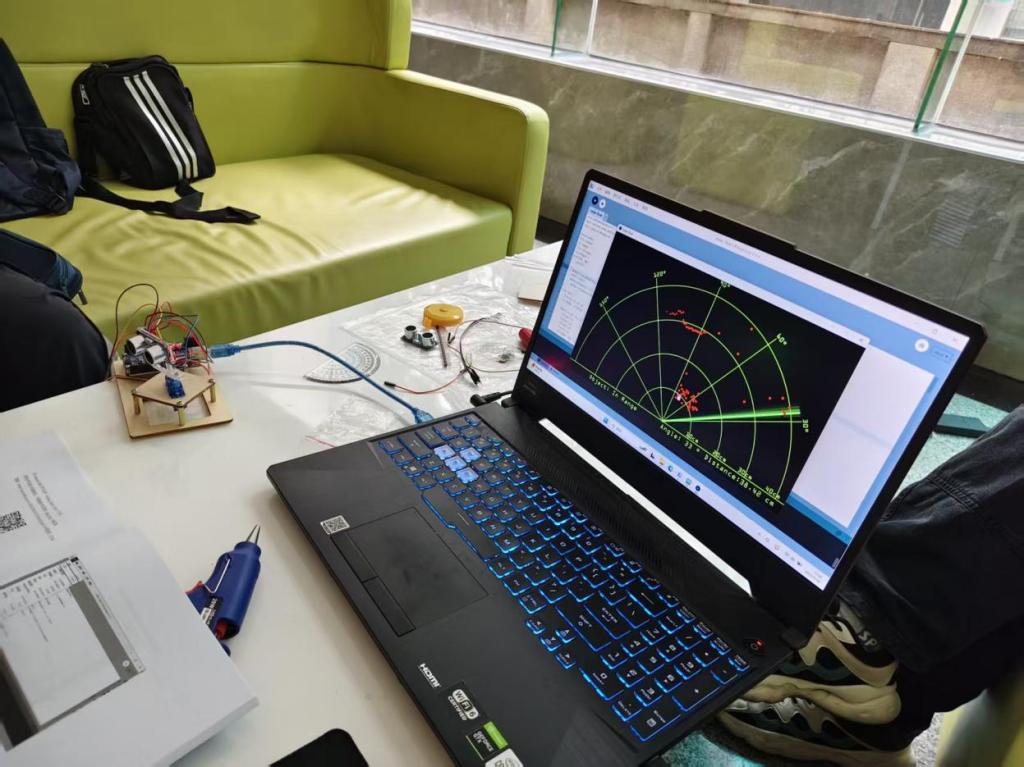
2. 将超声波雷达装置垫高5cm放置于桌面,保证雷达前、左、右三方均有超过40cm的无杂物空间;
3. 将四种材质的被测物依次放置在雷达正前方20cm处,连接Arduino开发板与电脑,打开雷达显示面板,观察雷达是否能检测到物体,截图记录探测结果;
4. 采用PPT测量法计算实际探测距离:将截图裁剪至雷达40cm半圆处,调整图片宽度为20cm,插入线条测量物体到雷达的直线距离,通过公式![]() 计算实际探测距离;
计算实际探测距离;
5. 每种材质重复实验3次,记录雷达检测结果与探测距离,计算距离偏差值。
实验数据记录
表1 被测物材质对超声波雷达检测效果的影响
材质类型 |
重复次数 |
是否检测到物体 |
探测距离(cm) |
平均探测距离(cm) |
距离偏差(cm) |
检测成功率 |
海绵 |
1 |
否 |
— |
— |
— |
0% |
2 |
否 |
— |
— |
— |
||
3 |
否 |
— |
— |
— |
||
高密度泡沫 |
1 |
是 |
24.8 |
25.2 |
5.2 |
50% |
2 |
否 |
— |
— |
— |
||
3 |
是 |
25.6 |
— |
— |
||
塑料板 |
1 |
是 |
19.5 |
19.7 |
0.3 |
100% |
2 |
是 |
19.8 |
— |
— |
||
3 |
是 |
19.8 |
— |
— |
||
木头板 |
1 |
是 |
19.6 |
19.8 |
0.2 |
100% |
2 |
是 |
19.9 |
— |
— |
||
3 |
是 |
19.9 |
— |
— |
课题二、被测物角度对超声波雷达识别效果的影响
实验目的
探究被测物与雷达的不同夹角对雷达识别效果的影响,确定雷达有效探测角度范围,掌握雷达视角的精准测量方法。
实验步骤
1. 雷达装置按课题一要求摆放,在雷达正前方20cm处放置量角器,将课题一中的塑料板T形板中点穿过量角器半圈中心;
2. 依次调整T形板与量角器0-180°边线的夹角为0°、15°、30°、45°、60°、75°,每次调整后打开雷达显示面板,观察是否能检测到物体;
3. 对能检测到的角度,分别用CorelDRAW角度量法和PPT+islide控点调节法测量物体在雷达中的视角,两种方法交叉验证,减小测量误差;
4. 每个角度重复实验3次,记录雷达检测结果与视角测量值,分析角度与检测效果的关联。
实验数据记录
表2 被测物角度对超声波雷达检测效果的影响
被测物与雷达夹角(°) |
重复次数 |
是否检测到物体 |
雷达检测视角(°) |
平均检测视角(°) |
视角测量误差(°) |
0 |
1 |
是 |
8.2 |
8.3 |
≤3 |
2 |
是 |
8.4 |
— |
||
3 |
是 |
8.3 |
— |
||
15 |
1 |
是 |
8.5 |
8.6 |
≤3 |
2 |
是 |
8.7 |
— |
||
3 |
是 |
8.6 |
— |
||
30 |
1 |
是 |
8.8 |
8.9 |
≤3 |
2 |
是 |
8.9 |
— |
||
3 |
是 |
8.9 |
— |
||
45 |
1 |
是 |
9.1 |
9.2 |
≤3 |
2 |
是 |
9.2 |
— |
||
3 |
是 |
9.3 |
— |
||
60 |
1 |
是 |
9.5 |
9.6 |
≤3 |
2 |
是 |
9.6 |
— |
||
3 |
是 |
9.7 |
— |
||
75 |
1 |
否 |
— |
— |
— |
2 |
否 |
— |
— |
— |
|
3 |
否 |
— |
— |
— |
课题三、被测物宽度对超声波雷达识别效果的影响
实验目的
探究被测物实际宽度对超声波雷达检测宽度的影响,分析雷达估算宽度与实际宽度的偏差规律及成因
实验步骤
1. 用裁纸刀将高密度泡沫裁成1×10×1.5cm、2×10×1.5cm、3×10×1.5cm、4×10×1.5cm、5×10×1.5cm的5组立方体,保证长度、高度一致,仅宽度为变量;
2. 将雷达装置按要求摆放,将5组不同宽度的泡沫立方体依次放置在雷达正前方20cm处,连接设备并打开雷达显示面板;
3. 参考课题一的距离测量方法,测量雷达检测到的物体宽度,截图记录数据;
4. 每组宽度重复实验3次,记录实际宽度与雷达检测宽度,计算偏差值,用Excel绘制散点图,分析二者的关联规律。
实验数据记录
表3 被测物实际宽度与超声波雷达检测宽度的关联
被测物实际宽度(cm) |
重复次数 |
雷达检测宽度(cm) |
平均检测宽度(cm) |
宽度偏差(cm) |
偏差率(%) |
1 |
1 |
0.7 |
0.8 |
0.2 |
20.0 |
2 |
0.8 |
— |
— |
||
3 |
0.9 |
— |
— |
||
2 |
1 |
1.7 |
1.8 |
0.2 |
10.0 |
2 |
1.8 |
— |
— |
||
3 |
1.9 |
— |
— |
||
3 |
1 |
2.7 |
2.8 |
0.2 |
6.7 |
2 |
2.8 |
— |
— |
||
3 |
2.9 |
— |
— |
||
4 |
1 |
3.7 |
3.8 |
0.2 |
5.0 |
2 |
3.8 |
— |
— |
||
3 |
3.9 |
— |
— |
||
5 |
1 |
4.6 |
4.7 |
0.3 |
6.0 |
2 |
4.7 |
— |
— |
||
3 |
4.8 |
— |
— |
课题四、基于三角测距法的障碍物方位指示装置制作与调试
实验目的
利用HC-SR04超声波传感器与Arduino开发板,基于三角测距法搭建障碍物方位指示装置,完成电路连接、程序编写与多版本调试,实现障碍物方位与距离的精准探测。
实验步骤
1. 装置搭建:准备长20cm以上的亚克力板,将两个HC-SR04超声波传感器间距保持8cm以上、传感器与SG90舵机间距保持10cm以上,用热熔胶粘贴在亚克力板上,测量并记录各部件实际间距;
2. 电路连接:按规范连接传感器、舵机与Arduino开发板,左超声波传感器GND接开发板GND、VCC接3.3V、Trig接10脚、Echo接11脚;右超声波传感器GND接GND、VCC接5V、Trig接2脚、Echo接3脚;舵机红线接5V、棕线接GND、黄线接12脚;
3. 程序编写:基于Arduino IDE,以雷达探测基础模板程序为框架,结合三角测距法原理编写程序,核心逻辑为:检测两侧传感器到目标的距离→通过余弦定理计算夹角 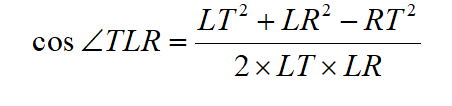 →计算舵机到目标的距离
→计算舵机到目标的距离  →调整舵机角度指向障碍物;
→调整舵机角度指向障碍物;
4. 程序调试:编写完成后上传程序,用不同材质、不同距离的障碍物进行测试,记录装置探测偏差,依次优化程序版本,解决方位识别不准、距离偏差大等问题;
5. 记录各版本程序的调试内容与探测效果,确定最优程序版本,完成装置最终调试。
实验数据记录
表4 障碍物方位指示装置多版本程序调试效果
程序版本 |
调试优化内容 |
探测距离范围(cm) |
方位检测误差(°) |
距离检测误差(cm) |
舵机响应效果 |
V1.0 |
基础程序编写,实现核心探测逻辑 |
0-20 |
≥10 |
≥5 |
响应延迟大 |
V2.0 |
优化距离计算公式,修正数据偏差 |
0-30 |
8-10 |
3-5 |
响应延迟减小 |
V3.0 |
调整传感器采样频率,提升数据稳定性 |
0-35 |
5-8 |
2-3 |
响应及时,无明显延迟 |
V4.0 |
优化舵机角度控制代码,精准指向目标 |
0-40 |
≤5 |
2 |
指向精准,无偏移 |
V5.0 |
整合优化代码,修复程序漏洞,精简运行步骤 |
0-40 |
≤5 |
≤2 |
响应快速、指向精准、运行稳定 |
课题五、基于Matlab的相控阵雷达模拟——天线数量对主瓣波束宽度的影响
实验目的
利用Matlab的Sensor Array Analyzer工具模拟均匀线性相控阵雷达,探究天线阵列元素数量对雷达主瓣波束宽度的影响,明确二者的关联规律
实验步骤
1. 安装Matlab2014b及以上版本,打开软件后选择APPS选项卡中的Sensor Array Analyzer工具,进入模拟界面;
2. 参数设置:Array Type选择Uniform Linear(均匀线性),Element Type选择Istropic Antenna(全向天线),勾选BackBaffled(天线后方信号屏蔽),Element Spacing(天线间距)设为0.5,View选择2D Array Directivity(二维阵列方向图),Cut Type选择Azimuth Cut-Polar(方位极坐标切面),信号频率设为3e+08Hz;
3. 变量调整:依次将Number of Elements(天线数量)调整为2、4、8、16、32、48、64,每次调整后点击Apply,等待模拟图像生成;
4. 数据测量:记录每次模拟的最高功率值,找到最高功率-3dB的位置,测量并记录雷达主瓣波束宽度(3dB波束宽度);
5. 将天线数量与对应的主瓣波束宽度整理成表格,用Excel绘制折线图,分析二者的关联规律。
实验数据记录
表5 均匀线性相控阵雷达天线数量与主瓣波束宽度的关联
天线阵列元素数量 |
最高功率(dB) |
主瓣波束宽度(°) |
定向探测精准度 |
2 |
6.02 |
60 |
低 |
4 |
9.03 |
35 |
较低 |
8 |
12.04 |
20 |
中等 |
16 |
15.05 |
15 |
较高 |
32 |
18.06 |
10 |
高 |
48 |
21.07 |
9 |
高 |
64 |
24.08 |
8 |
极高 |
四、结果与分析
课题一结果:被测物材质对雷达识别效果的影响
塑料板、木头板两种硬质致密材质可被超声波雷达100%精准检测,20cm预设距离下探测距离偏差≤0.3cm,反射信号稳定、辨识度高;高密度泡沫为多孔半硬质材质,检测成功率仅50%,探测距离偏差达5.2cm,信号微弱且易中断;海绵为多孔疏松材质完全无法被雷达检测,因超声波在海绵内部被大量吸收,无有效反射信号传回传感器。材质的致密性是影响超声波雷达识别效果的核心因素,材质越致密,超声波反射效果越好,雷达检测精度越高。
课题二结果:被测物角度对雷达识别效果的影响
被测物与雷达的夹角在0°-60°范围内,雷达可稳定检测到物体,视角测量误差≤3°,且夹角越小,检测效果越好、视角偏差越小;夹角>75°时,雷达完全无法检测,因超声波反射信号超出HC-SR04传感器40°的有效接收范围,无法被传感器捕捉。0°-60°为超声波雷达的有效探测角度范围,实际应用中需保证探测目标处于该角度范围内,以提升探测精度。
课题三结果:被测物宽度对雷达识别效果的影响
被测物实际宽度与超声波雷达检测宽度呈显著正相关,实际宽度从1cm增加至5cm时,雷达检测宽度从0.8cm同步增加至4.7cm,整体偏差稳定在0.2-0.3cm之间,偏差率随实际宽度增加呈下降趋势。偏差成因主要为雷达探测视角的边缘效应与被测物边缘的反射信号干扰,极窄被测物(<1cm)因反射信号面积过小,雷达识别精度更低。
课题四结果:障碍物方位指示装置制作与调试
基于三角测距法成功搭建超声波雷达障碍物方位指示装置,经5版程序迭代优化后,装置可稳定实现0-40cm范围内障碍物的方位与距离探测,方位检测误差≤5°,距离检测误差≤2cm,SG90舵机响应快速、指向精准且运行无明显延迟。装置核心优势为体积小、操作简便、实时性强,通过优化距离计算公式、调整传感器采样频率、精准控制舵机角度,有效解决了初始版本的探测偏差大、响应延迟等问题,满足基础障碍物探测的实际需求。
课题五结果:相控阵雷达模拟——天线数量与主瓣波束宽度的关联
利用Matlab模拟均匀线性相控阵雷达发现,天线阵列元素数量与主瓣波束宽度呈显著负相关:天线数量从2增加至64时,雷达最高功率从6.02dB提升至24.08dB,主瓣波束宽度从60°持续收窄至8°。天线数量越多,雷达的信号聚焦能力越强,主瓣波束宽度越窄,定向探测的精准度越高。该结果为优化超声波雷达的定向探测能力提供了重要技术依据,后续可通过增加天线数量提升雷达对特定目标的探测精度。
五、结论
1. 超声波雷达的识别效果与被测物材质紧密相关,硬质致密材质(塑料板、木头板)为最优检测材质,多孔疏松材质(海绵)无法被检测,实际应用中需根据探测目标的材质特性选择适配的超声波雷达,或对探测目标进行材质处理以提升反射效果。
2. 超声波雷达存在固定有效探测角度范围(0°-60°),此范围内探测精度高、信号稳定,超出该范围后检测效果显著下降甚至无法检测,实际使用中需通过调整雷达安装角度、控制探测范围,保证目标处于有效探测角度内。
3. 被测物实际宽度与超声波雷达检测宽度呈显著正相关,二者偏差值稳定,可通过数据拟合建立宽度修正公式,对雷达检测宽度进行精准修正,有效提升对不同宽度目标的探测精度。
4. 基于HC-SR04超声波传感器与Arduino开发板,利用三角测距法可成功搭建简易障碍物方位指示装置,通过多版本程序迭代调试,能解决探测偏差、响应延迟等核心问题,实现小范围障碍物的精准探测,该装置为超声波雷达的基础工程应用提供了可复制的实践参考。
5. 均匀线性相控阵雷达中,天线数量与主瓣波束宽度呈负相关,与定向探测精准度呈正相关,增加天线数量可显著提升雷达的信号聚焦能力与定向探测精度,该结论为超声波雷达的技术优化与升级提供了理论依据,为后续研发高精度定向雷达提供了实验支撑。
六、研究展望
本研究完成了超声波雷达探测特性的系统探究与基础装置制作,但仍存在一定的探究空间:可进一步探究天线间距、探测距离、环境温度等因素对相控阵雷达探测效果的影响,完善相控阵雷达的基础理论研究;可对搭建的障碍物方位指示装置进行功能升级,增加蓝牙数据传输、数字显示屏实时显示、远距离探测等功能,提升装置的实用性与拓展性;可结合智能小车、环境监测等实际应用场景,将超声波雷达技术与物联网、人工智能等技术结合,实现从基础实验探究到实际工程应用的进一步延伸,让超声波雷达技术在更多领域发挥实践价值。