无人探测雷达研究探索
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
无人探测雷达研究探索 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
|
姜启凡 |
男 |
高一14 |
组长 |
||
蒋政霖 |
男 |
高一14 |
组员 |
||
邱子峪 |
男 |
高一14 |
组员 |
||
韩东成 |
男 |
高一14 |
组员 |
||
指导教师 |
刘晓涵 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 通过开展雷达相关模拟实验,了解雷达的基本工作原理,认识雷达在生活、科技、国防等领域的应用,培养科学探究、动手实践与问题解决能力。 主要内容: 实验一:探究被测物材质(海绵、高密度泡沫、塑料板、木头板)对超声波雷达识别效果的影响,明确不同材质的可检测性及探测距离差异; 实验二:探究被测物摆放角度对超声波雷达识别效果的影响,确定雷达可有效探测的角度范围,掌握雷达视角的精准测量方法; 实验三:探究被测物实际宽度对超声波雷达检测宽度的影响,分析雷达估算宽度与实际宽度的偏差规律及成因; 实验四:基于三角测距法,利用HC-SR04传感器与Arduino开发板搭建障碍物方位指示装置,完成电路连接、程序编写与多版本程序调试优化; 实验五:利用Matlab的Sensor Array Analyzer工具模拟均匀线性相控阵雷达,探究天线阵列元素数量对雷达主瓣波束宽度的影响,明确二者关联规律。 |
||||
研 究 假 设 |
1、被测物材质越硬和致密,识别精准度越高;而多孔疏松的材质识别效果差; 2、被测物与雷达的夹角在0°-60°范围内时,雷达识别精准度高;当夹角大于60°时,雷达检测效果显著下降,夹角过大时无法检测; 3、被测物的实际宽度与超声波雷达检测宽度呈正相关关系,且被测物与雷达的距离越大,偏差越大; 4、均匀线性相控阵雷达天线阵列元素数量越多,主瓣半波束宽度越窄; |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:无人探测雷达研究探索 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:刘晓涵 |
班级:高一14班 |
||
参加活动成员: 姜启凡 蒋政霖 邱子峪 韩东成 |
|||
活动内容: 1)目的(解决什么问题): 汇总各组员的实验数据,分析交流,总结经验,得出结论。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验数据汇总与交流,数据分析和原因探究,得出统一结论。 3)过程: ①组员各自汇报自己的实验结果与实验发现; ②对所得数据进行进一步研究,查阅相关资料; ③总结普遍规律,形成共识。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①超声波雷达对硬质、致密、平整材质(塑料、木头)识别距离远、稳定性高;对软质、多孔、疏松材质(高密度泡沫、海绵)识别距离显著缩短,海绵最难检测。 ②被测物摆放角度越大(越偏离正对雷达),反射回波越弱,识别效果越差,探测距离越短。超声波雷达对平面被测物的有效探测角度范围约为 ±30°,超过 ±30°后识别效果急剧变差,大于 ±60°基本无法有效探测。 ③当物体实际宽度小于超声波波束在检测距离处的有效直径时,雷达无法准确分辨物体边缘,会明显高估物体宽度,偏差较大;随着实际宽度增大,波束仅照射物体局部,边缘识别逐渐清晰,估算宽度与实际宽度的偏差不断减小;当物体宽度明显大于波束直径时,雷达可较准确地估算宽度,偏差趋于稳定。 ④均匀线性相控阵天线阵列元素数量越多,主瓣半波束宽度越窄,且近似成严格反比关系。 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 无人探测雷达研究探索 |
编号: |
||||
课题组成员 |
组长:姜启凡 |
组员:蒋政霖 邱子峪 韩东成 |
|||
指导教师:刘晓涵 |
报告执笔人: 姜启凡 |
完成时间:9月28日 |
|||
主导课程:声呐雷达研究 |
相关课程:物理学 |
||||
(一) 书面材料 |
|||||
课题成果: (1)预期的成果: 五个实验均成功,符合预定推测。 ①完成材质、角度、宽度对超声波雷达探测影响的三大实验,明确雷达核心探测特性; ②搭建基于三角测距法的障碍物方位指示装置,完成程序编写与多版本调试,实现精准探测; ③完成Matlab相控阵雷达模拟实验,明确天线数量与主瓣波束宽度的关联规律; ④形成完整的实验数据记录与研究结论,完成科技论文与成果海报制作。 (2)课题实际取得的成果 实验一结果:超声波雷达对硬质、致密、平整材质(塑料、木头)识别距离远、稳定性高;对软质、多孔、疏松材质(高密度泡沫、海绵)识别距离显著缩短,海绵最难检测。 实验二结果:被测物摆放角度越大(越偏离正对雷达),反射回波越弱,识别效果越差,探测距离越短。超声波雷达对平面被测物的有效探测角度范围约为 ±30°,超过 ±30°后识别效果急剧变差,大于 ±60°基本无法有效探测。 实验三结果:当物体实际宽度小于超声波波束在检测距离处的有效直径时,雷达无法准确分辨物体边缘,会明显高估物体宽度,偏差较大;随着实际宽度增大,波束仅照射物体局部,边缘识别逐渐清晰,估算宽度与实际宽度的偏差不断减小;当物体宽度明显大于波束直径时,雷达可较准确地估算宽度,偏差趋于稳定。 实验四结果:基于HC-SR04传感器、Arduino开发板与三角测距法,成功搭建障碍物方位指示装置,在0-40cm内可精确检测障碍物方位,误差较小。 实验五结果:均匀线性相控阵天线阵列元素数量越多,主瓣半波束宽度越窄,且近似成严格反比关系。 |
|||||
参考书目及资料: 1、《科探方舟超声波雷达科学盒子实验手册》 2、《HC-SR04超声波传感器实操指南》 3、《Arduino开发板程序编写基础教程》 4、《Matlab Sensor Array Analyzer相控阵雷达模拟教程》 5、《超声波探测技术原理与应用》 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1份)、材质/角度/宽度雷达探测实验数据记录表(3份)、装置程序调试记录(1份)、Matlab相控阵雷达模拟数据记录表(1份)、实验操作与装置演示照片/视频(1套) |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 1、编号:KT-01 名称:超声波雷达障碍物方位指示装置 制作者:姜启凡 蒋政霖 邱子峪 韩东成 内容:含HC-SR04超声波传感器(2个)、Arduino UNO开发板、SG90舵机、亚克力支架,配套调试完成的Arduino探测程序,含电路连接示意图 功能:实现0-40cm范围内障碍物的方位识别与距离探测,舵机精准指向障碍物位置 2、编号:KT-02 名称:课题研究科学海报 制作者:姜启凡 蒋政霖 邱子峪 韩东成 内容:含五大实验设计、核心数据图表、装置实物图、相控阵雷达模拟结果、研究核心结论 功能:课题成果可视化展示,清晰呈现超声波雷达探测特性与装置制作亮点 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4.聚焦科学技术——无人声呐雷达研究
徐州市第一中学高一14班 薛博文 李泽洋 胡莫涵 王梓安
【摘要】
针对科学探究问题,小组成员通过三个小实验对雷达性能有进一步的了解,对目前国家实施的科教兴国战略有深入认识。实验结果发现在
【关键词】雷达;声音;材料;
一、研究背景
当今时代,科技飞速发展。随着物联网与人工智能技术的深度融合,超声波雷达凭借其成本低廉、技术成熟及近距离探测精度高的核心优势,在智能汽车、服务机器人和工业检测等领域发挥着不可替代的基础感知作用。当前,该技术正经历从模拟到数字、从单点探测到阵列协同的演进,并与AI算法相结合以提升环境适应性。然而,在极端天气下的性能衰减、多机串扰以及复杂障碍物的精准识别等方面仍存在技术痛点。因此,本课题旨在突破传统超声波的探测瓶颈,对于提升智能系统在“最后一米”的感知可靠性与安全性具有重要的理论价值与现实意义。
二、实验材料
1、实验耗材:
海绵、高密度泡沫、亚克力塑料板、木头板、热熔胶棒、杜邦线、透明胶带
2、实验仪器:
HC-SR04超声波传感器(2个)、Arduino UNO开发板、SG90舵机、亚克力支架、裁纸刀、螺丝刀、量角器、直尺、电子秤
3、软件与工具:
电脑(预装Arduino IDE、Matlab2014b及以上、CorelDRAW、PPT+islide插件)、方口数据线、热熔胶枪
三、研究过程
课题一:被测物材质对超声波雷达识别效果的影响
实验目的:探究海绵、高密度泡沫、塑料板、木头板四种不同材质对超声波雷达识别效果的影响,明确不同材质的可检测性及探测距离偏差规律。
实验步骤:
1.用裁纸刀将海绵、高密度泡沫裁成5×10×1.5cm的立方体,塑料板、木头板制作成同等尺寸的平板装置,用热熔胶固定成型;
2.将超声波雷达装置垫高5cm放置于桌面,保证雷达前、左、右三方均有超过40cm的无杂物空间;
3.将四种材质的被测物依次放置在雷达正前方20cm处,连接Arduino开发板与电脑,打开雷达显示面板,观察雷达是否能检测到物体,截图记录探测结果;4.采用PPT测量法计算实际探测距离:将截图裁剪至雷达40cm半圆处,调整图片宽度为20cm,插入线条测量物体到雷达的直线距离,通过公式 计算实际探测距离;
5.每种材质重复实验3次,记录雷达检测结果与探测距离,计算距离偏差值。
课题二:被测物角度对超声波雷达识别效果的影响
实验目的:探究被测物与雷达的不同夹角对雷达识别效果的影响,确定雷达有效探测角度范围,掌握雷达视角的精准测量方法。
实验步骤:
1.雷达装置按课题一要求摆放,在雷达正前方20cm处放置量角器,将课题一中的塑料板T形板中点穿过量角器半圈中心;
2.依次调整T形板与量角器0-180°边线的夹角为0°、15°、30°、45°、60°、75°,每次调整后打开雷达显示面板,观察是否能检测到物体;
3.对能检测到的角度,分别用CorelDRAW角度量法和PPT+islide控点调节法测量物体在雷达中的视角,两种方法交叉验证,减小测量误差;
4.每个角度重复实验3次,记录雷达检测结果与视角测量值,分析角度与检测效果的关联。
课题三:被测物宽度对超声波雷达识别效果的影响
实验目的:探究被测物实际宽度对超声波雷达检测宽度的影响,分析雷达估算宽度与实际宽度的偏差规律及成因
实验步骤:
1.用裁纸刀将高密度泡沫裁成1×10×1.5cm、2×10×1.5cm、3×10×1.5cm、4×10×1.5cm、5×10×1.5cm的5组立方体,保证长度、高度一致,仅宽度为变量;
2.将雷达装置按要求摆放,将5组不同宽度的泡沫立方体依次放置在雷达正前方20cm处,连接设备并打开雷达显示面板;
3.参考课题一的距离测量方法,测量雷达检测到的物体宽度,截图记录数据;
4.每组宽度重复实验3次,记录实际宽度与雷达检测宽度,计算偏差值,用Excel绘制散点图,分析二者的关联规律。
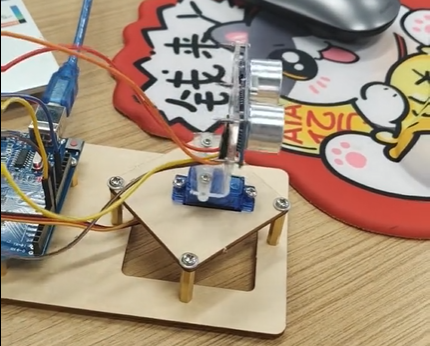
课题四:基于三角测距法的障碍物方位指示装置制作与调试
实验目的:利用HC-SR04超声波传感器与Arduino开发板,基于三角测距法搭建障碍物方位指示装置,完成电路连接、程序编写与多版本调试,实现障碍物方位与距离的精准探测。
实验步骤:
1.装置搭建:准备长20cm以上的亚克力板,将两个HC-SR04超声波传感器间距保持8cm以上、传感器与SG90舵机间距保持10cm以上,用热熔胶粘贴在亚克力板上,测量并记录各部件实际间距;
2.电路连接:按规范连接传感器、舵机与Arduino开发板,左超声波传感器GND接开发板GND、VCC接3.3V、Trig接10脚、Echo接11脚;右超声波传感器GND接GND、VCC接5V、Trig接2脚、Echo接3脚;舵机红线接5V、棕线接GND、黄线接12脚;
3.程序编写:基于Arduino IDE,以雷达探测基础模板程序为框架,结合三角测距法原理编写程序,核心逻辑为:检测两侧传感器到目标的距离→通过余弦定理计算夹角 →计算舵机到目标的距离 →调整舵机角度指向障碍物;
4.程序调试:编写完成后上传程序,用不同材质、不同距离的障碍物进行测试,记录装置探测偏差,依次优化程序版本,解决方位识别不准、距离偏差大等问题;
5.记录各版本程序的调试内容与探测效果,确定最优程序版本,完成装置最终调试。
课题五:基于Matlab的相控阵雷达模拟——天线数量对主瓣波束宽度的影响
实验目的:利用Matlab的Sensor Array Analyzer工具模拟均匀线性相控阵雷达,探究天线阵列元素数量对雷达主瓣波束宽度的影响,明确二者的关联规律
实验步骤:
1.安装Matlab2014b及以上版本,打开软件后选择APPS选项卡中的Sensor Array Analyzer工具,进入模拟界面;
2.参数设置:Array Type选择Uniform Linear(均匀线性),Element Type选择Istropic Antenna(全向天线),勾选BackBaffled(天线后方信号屏蔽),Element Spacing(天线间距)设为0.5,View选择2D Array Directivity(二维阵列方向图),Cut Type选择Azimuth Cut-Polar(方位极坐标切面),信号频率设为3e+08Hz;
3.变量调整:依次将Number of Elements(天线数量)调整为2、4、8、16、32、48、64,每次调整后点击Apply,等待模拟图像生成;
4.数据测量:记录每次模拟的最高功率值,找到最高功率-3dB的位置,测量并记录雷达主瓣波束宽度(3dB波束宽度);
5.将天线数量与对应的主瓣波束宽度整理成表格,用Excel绘制折线图,分析二者的关联规律。
四、结果与分析
实验一结果:超声波雷达对硬质、致密、平整材质(塑料、木头)识别距离远、稳定性高;对软质、多孔、疏松材质(高密度泡沫、海绵)识别距离显著缩短,海绵最难检测。
实验二结果:被测物摆放角度越大(越偏离正对雷达),反射回波越弱,识别效果越差,探测距离越短。超声波雷达对平面被测物的有效探测角度范围约为 ±30°,超过 ±30°后识别效果急剧变差,大于 ±60°基本无法有效探测。
实验三结果:当物体实际宽度小于超声波波束在检测距离处的有效直径时,雷达无法准确分辨物体边缘,会明显高估物体宽度,偏差较大;随着实际宽度增大,波束仅照射物体局部,边缘识别逐渐清晰,估算宽度与实际宽度的偏差不断减小;当物体宽度明显大于波束直径时,雷达可较准确地估算宽度,偏差趋于稳定。
实验四结果:基于HC-SR04传感器、Arduino开发板与三角测距法,成功搭建障碍物方位指示装置,在0-40cm内可精确检测障碍物方位,误差较小。
实验五结果:均匀线性相控阵天线阵列元素数量越多,主瓣半波束宽度越窄,且近似成严格反比关系。
五、问题与展望
基于当前技术背景,针对超声波雷达的研究主要聚焦于解决复杂环境下的感知可靠性与多维信息获取能力两大核心问题。具体而言,在雨雪、泥泞或强干扰环境下,如何通过信号处理算法有效滤除噪声并克服多传感器串扰,是保障其全天候稳定工作的关键;在智能感知层面,研究重点正从单一的测距功能转向如何利用阵列化设计与深度学习,实现对障碍物类别的精准识别及三维空间的定位成像。展望未来,超声波雷达技术将朝着智能化、融合化与微型化的方向发展。它不仅是独立的感知单元,更将成为多模态感知系统中的重要一环,通过与视觉、毫米波雷达的深度融合,弥补各自在特定场景下的不足。随着新材料与新工艺的应用,其性能有望进一步突破,在自动驾驶、全自动化机器人及万物互联的泛在感知领域中持续发挥不可替代的基础作用。