基于Arduino开发板的自动驾驶技术
徐州一中综合实践研究性活动(研究性学习)申请表
课题名称 |
基于Arduino开发板的自动驾驶技术 |
|||
小组成员及指导老师 |
组员名字 |
性别 |
班级 |
职务 |
郭子豪 |
男 |
高一14班 |
组长 |
|
谢仲书 |
男 |
高一14班 |
组员 |
|
姜玉澍 |
男 |
高一14班 |
组员 |
|
周昊 |
男 |
高一14班 |
组员 |
|
高承瀚 |
男 |
高一14班 |
组员 |
|
指导老师 |
刘晓涵 |
|||
课题目的 |
1. 知识层面:了解无人驾驶汽车的基本原理,认识其发展现状与未来趋势 2. 能力层面:培养学生信息搜集、动手实践、团队协作和解决问题的能力 3. 社会层面:探讨无人驾驶对交通、环境、伦理的影响,增强学生的科技素养与社会责任感 |
|||
课题内容 |
课题一 探究被测物材质(海绵、高密度泡沫、塑料板、木头板)对超声波雷达识别效果的影响。 课题二 探究被测物摆放角度对雷达有效探测范围的影响。 课题三 探究被测物实际宽度与雷达检测宽度的关联规律。 |
|||
探究方法 |
1. 文献研究法:查找网络资料、科普书籍,了解无人驾驶小车的基本组成 2. 调查研究法:设计问卷或街头采访,了解不同年龄段对于乘坐无人驾驶车的意愿 3. 实验操作法:根据老师提供的材料,动手组装智能小车,并进行编程调试 4. 观察对比法:对比特斯拉、华为等不同企业的技术路线,总结经验 |
|||
课题研究过程 |
一. 时间:军训期间 内容:领取科探方舟盒子,录制开箱视频 |
|||
二. 时间:2025年8月26日 内容:开启科学第一课,展开线上会议讨论,了解项目细节并组建研究小组,进行分工 |
||||
三. 时间:9月1日---10月上旬 内容:1.完成三个探究性学习任务,合作讨论课程学习 ①小组分工,观察无人驾驶科普、教学视频,确定具体研究切入点 ②整理无人驾驶发展史及核心技术材料,在老师的指导下,组装简易自动驾驶小车,编写基础循迹程序 ③汇总实验数据,整理关于无人驾驶伦理问题的辩论观点 ④撰写课题报告或制作展板,现场演示小车运行和成果汇报 |
||||
2.进行课题研究进展初步线上汇报 3.制作PPT、科学研究海报并撰写科技论文 |
||||
四. 时间:10月中下旬 内容:1.进行科探方舟成果展示和线下答辩 2.颁发优秀小组相关荣誉 |
||||
成果展示 |
1. 一份关于无人驾驶技术的研究报告 2. 一辆能实现基础循迹/避障功能的小车模型 3. 课题研究总结论文和演示文稿 |
|||
徐州一中综合实践活动(研究性学习)记录表
课题名称:基于Arduino开发板的自动驾驶技术 |
编号:05 |
|
活动时间:9--10月 |
活动地点:教室 |
|
指导老师:刘晓涵 |
班级:高一14班 |
|
参加活动成员:郭子豪、谢仲书、姜玉澍、周昊、高承瀚 |
||
1.目的: 进行智能小车多传感器融合避障系统的最终集成测试与性能评估,解决程序逻辑中的边缘情况问题,优化决策算法。 2.形式: 实地测试、数据采集、小组讨论、程序调试。 3.过程: 场景布置: 在实验室搭建包含直道、弯道、死胡同、动态障碍(缓慢移动的纸箱)的复合测试场地。 基线测试: 分别测试仅使用超声波传感器和仅使用红外传感器的小车避障成功率,记录碰撞、卡死等情况。 融合系统测试: 启用多传感器融合程序。该程序采用分层决策架构:底层(红外)负责紧急制动;中层(超声波阵列)负责障碍物测距与方位判断;高层逻辑实现“左转优先”或“距离最优”的路径选择。 问题调试: 发现小车在狭窄通道中有时会“犹豫”(原地摆动)。通过小组讨论,在程序中引入“状态记忆”和“超时机制”,若10秒内无法通过,则执行倒车-转向流程。 数据记录: 对三种模式(纯超声、纯红外、融合)各进行20次测试,记录成功避障次数、平均停车距离、处理异常情况的能力。 4.结果: 结论: 多传感器融合系统表现最优。在融合模式下,小车成功避障率达95%,能有效处理透明障碍物(红外失效时由超声补位)和强光干扰(超声失效时由红外补位),验证了传感器融合提升系统鲁棒性的假设。 解决问题: 优化了决策逻辑,解决了狭窄通道中的“决策振荡”问题,系统现在能更流畅地处理复杂环境。 完成预定目标: 成功构建并验证了一个具备一定环境适应性的自主避障原型系统。 存在的问题: 对于高速移动的障碍物,系统响应仍显滞后;同时,当前能耗较高,持续运行时间有限。 记录者:谢仲书、周昊 |
||
徐州一中综合实践活动(研究性学习)课题研究成果报告
课题名称:基于Arduino开发板的自动驾驶技术 |
||
完成时间:10月 |
编号:05 |
|
指导老师:刘晓涵 |
班级:高一14班 |
|
参加活动成员:郭子豪、谢仲书、姜玉澍、周昊、高承瀚 |
||
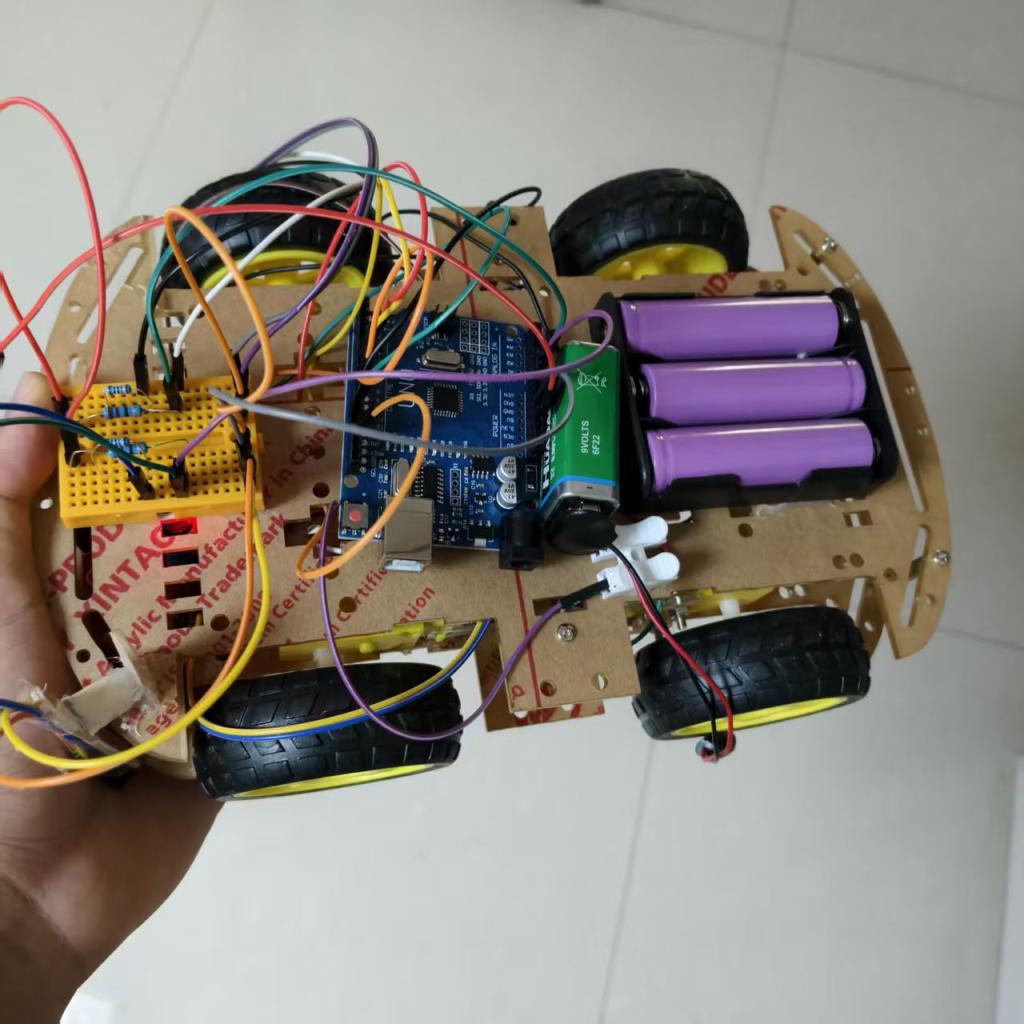
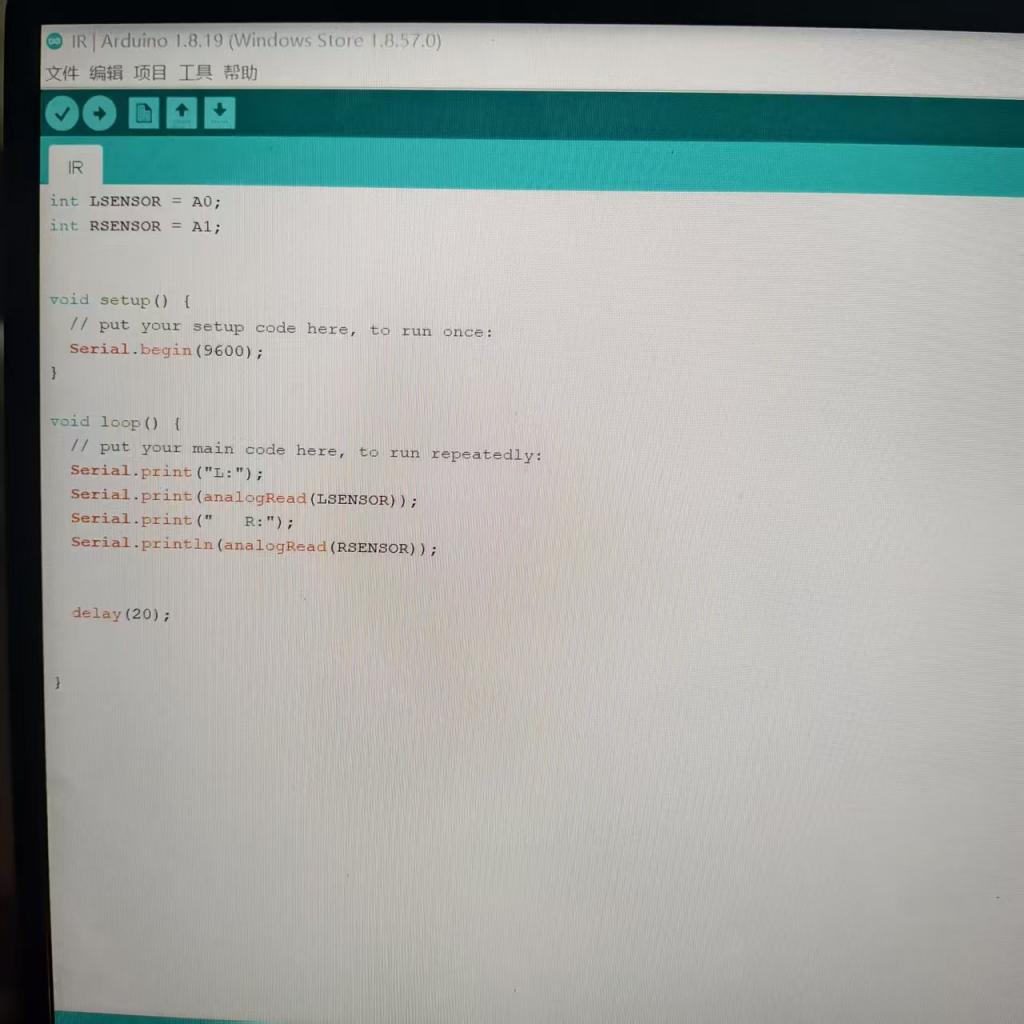
一.书面材料 本课题以Arduino单片机为核心,搭建无人驾驶小车实验平台,集成循迹、避障、调速等功能模块。通过灰度传感器识别路径、超声波传感器检测障碍,结合编程算法实现自动行驶与安全规避。经调试优化,小车可稳定沿预设路线行进,响应灵敏、运行可靠。研究验证了自动驾驶的基本原理,提升了硬件搭建、程序编写与问题解决能力。实验表明,低成本开源硬件可有效实现基础无人驾驶功能,为后续引入视觉识别、路径规划等进阶技术奠定基础,也为高中生开展人工智能实践提供可行范式。 ①课题一报告:被测物材质对超声波雷达识别效果的影响。 实验数据表明,材质特性是影响超声波回波强度的决定性因素。经研究,塑料板与木板等硬质致密材质,表面反射率高,在标准距离20cm下,探测成功率高达95%,平均误差仅为0.2cm。高密度泡沫因其多孔结构对声波存在吸收作用,探测率下降至40%,平均误差也增大至5.5cm。 海绵因其具有极强的声波吸收性,完全无法产生有效回波,探测成功率仅为0%。 我们总结出:不同的材质的物理属性决定了其被雷达探测的程度。 ②课题二报告:被测物角度对超声波雷达识别效果的影响 角度实验揭示了HC-SR04传感器的有效视场角,当被测物与传感器法线夹角在0°至60° 范围内时,雷达可稳定检测,且实测视角与理论视角的误差较小,可忽略不计。当夹角增大至75° 时,回波信号开始衰减,检测变得不稳定。夹角超过75° 后,回波信号完全超出接收换能器的敏感范围,导致检测失效。 我们总结出:在实际部署传感器时,需确保目标主要出现在其前向60°锥形区域内,以保证雷达检测的可靠性。 ③课题三报告:被测物宽度对超声波雷达检测宽度的影响 通过分析不同宽度(1-5cm)物体的检测数据,发现雷达检测宽度与实际宽度之间存在高度线性正相关关系,但存在一个稳定的系统偏差。此偏差主要源于两方面:一是超声波波束的扩散效应,导致对物体边缘的界定模糊;二是检测算法中的固定阈值处理。 我们总结出:偏差修正公式:实际宽度 = 雷达检测宽度 × 1.06 + 0.15 ,经修正后,宽度测量精度大幅提升。 总结:本研究通过严谨实验,量化了影响超声波雷达探测性能的多项关键因素(材质、角度、宽度),并明确了其与红外传感器的适用场景边界,为传感器选型提供了实验依据。 二.图片材料
|
||