基于Arduino开发板的自动驾驶技术
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于Arduino开发板的自动驾驶技术 |
|||
小组成员及指导老师 |
组员姓名 |
性别 |
班级 |
职务 |
柳致远 |
男 |
高一14班 |
组长 |
|
陈子霄 |
男 |
高一14班 |
组员 |
|
张俊博 |
男 |
高一14班 |
组员 |
|
赵梓楷 |
男 |
高一14班 |
组员 |
|
齐中弈 |
男 |
高一14班 |
组员 |
|
指导老师 |
李嘉珞 |
|||
课题目的 |
探究自动驾驶小车的相关功能,不断完善自动驾驶小车的性能。 |
|||
课题内容 |
课题一 利用反射式光电传感器设计一款自动行驶的小车 课题二 探究不同传感器类型对于自动小车防撞效果的影响 课题三 制作可以跟随人行驶的智能小车 |
|||
探究方法 |
实验操作、查找资料 |
|||
课题研究过程 |
一、 时间:军训期间 内容:领取科学盒子,录制开箱视频。 二、 时间:2025 年 8 月 26 日 内容:开启科学第一课,在线上开展会议,了解项目细节并建设研究团队,小组分工。 三、 时间:9 月 1 日~10 月上旬 内容: 1、完成三个探究性学习任务,并合作讨论课程学习。 2、进行课题研究进展汇报。 3、制作 PPT、科学海报和科技论文。 四、 时间:10 月中旬 内容:进行科创方舟成果展示和答辩。 |
|||
成果展示 |
论文 |
|||
2.徐州一中综合实践活动(研究性学习)记录表
课题名称: 探究不同传感器类型对于自动小车防撞效果的影响(以课题二为样本) |
||
时间:2025年9月27日 |
参与成员:柳致远,陈子霄,张俊博,赵梓楷,齐中弈 指导老师:李嘉珞 |
|
实验过程 |
||
1提出问题 |
在不同情况下,超声波传感器和红外线传感器的效果谁更好? |
|
2作出假设 |
1在光线比较强烈,环境的噪音较少的条件下,超声波传感器的效果更好(预测依据:超声波传感器利用声音探测,红外线传感器利用光线进行探测,不同环境会对相应的传感器产生干扰) 2在光线比较弱,环境的噪音较大的条件下,红外线传感器的效果更好(预测依据:超声波传感器利用声音探测,红外线传感器利用光线进行探测,不同环境会对相应的传感器产生干扰) |
|
3设计实验方案 |
实验一实验1:强光+低噪(室外安静) 室外晴天(强光)、无噪音角落(低噪),两传感器对准50cm障碍物各测3次,记录数据算误差率,验证超声波传感器表现更优。 |
|
实验2:强光+高噪(室外+噪音源) 室外晴天(强光),用吹风机/手机播放嘈杂音乐(高噪),两传感器对准50cm障碍物各测3次,记录数据算误差率,观察两者受干扰情况。 |
||
实验3:弱光+低噪(室内安静) 拉遮光帘的室内(弱光)、关闭声源(低噪),两传感器对准50cm障碍物各测3次,记录数据算误差率,观察两者稳定性。 |
||
实验4:弱光+高噪(室内+噪音源) 拉遮光帘的室内(弱光),用吹风机/手机播放嘈杂音乐(高噪),两传感器对准50cm障碍物各测3次,记录数据算误差率,验证红外线传感器表现更优。 |
||
4实施实验 |
||
5数据分析处理 |
以数据,表格等方式呈现 |
|
6实验结论 |
光线较强的条件下,超声波传感器的效果较好。 噪音较大的条件下,红外线传感器效果较好。 |
|
记录人:柳致远 |
||
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:基于Auduino开发板的自动驾驶技术研究。 |
||||
课题组成员 |
柳致远,陈子霄,张俊博,赵梓楷,齐中弈 |
|||
指导教师:李嘉珞 |
报告执笔人: 柳致远 |
完成时间:10月5日 |
||
主导课程:自动驾驶 |
相关课程:信息学,物理学 |
|||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:通过不断地对版本改动和完善,使自动驾驶小车能够完成一圈的行驶,并且控制时间在1-2min之间 实验二结果:通过四种不同情况、不同环境的实验,可以发现:环境的光线强度对于红外距离传感器的影响比较大,环境的噪音高低对超声波距离传感器的影响较大。 实验三结果:通过调整小车confidence(置信度)的值,发现confidence(置信度)的值在60%-70%时小车跟踪效果较好 |
||||
参考书目及资料: [1] 陈广祥,张治斌.基于红外反射式传感器的循迹车系统设计[J].中国工控网,2010. [2] 赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013,28(5):1-4. [3] Arduino毕业设计——基于Arduino+PID+AI的自动驾驶小车[D].CSDN,2025. |
||||
成果展示: 论文及相关照片 |
||||
4.论文
自动驾驶——基于Arduino开发板的自动驾驶技术研究
高一14班 柳致远
【摘要】
本文以Arduino开发板为核心,开展自动驾驶小车相关的技术研究。完成了自动循迹,防撞测试对比,人体跟随三项实验。研究可为易简自动驾驶小车的设计提供参考
【关键词】
反射式光电传感器,距离传感器,confidence值
一、研究背景
目前,随着人工智能、计算机技术和传感技术的不断突破与发展,自动驾驶汽车逐渐得到普及与应用。我国是世界上自动驾驶技术发展较为完善的国家之一,众多车企也在持续开展相关技术研发,这为我们了解和探索自动驾驶提供了良好的环境。
在传统驾驶中,许多交通事故是由疲劳驾驶等人为因素造成的。如果自动驾驶技术能够进一步普及和完善,将有助于大幅减少此类事故的发生。例如,通过辅助制动、定速巡航等功能,可以有效提升交通安全性,保障人们的出行安全。
但当前我国自动驾驶技术仍存在不足,在实际应用中对驾乘人员的安全保障仍有待提升。基于此,我们小组对自动驾驶技术产生了浓厚的探究兴趣,并围绕基于Arduino开发板的自动驾驶技术开展研究,具体研究内容包括以下三个课题:
1. 利用反射式光电传感器设计一款自动行驶的小车
2. 探究不同传感器类型对于自动小车防撞效果的影响
3. 制作可以跟随人行驶的智能小车
二、实验材料
1. Arduino 主控板、电机、车轮、小车面板、各种传感器、导线等(学校提供)
2. 直尺、螺丝刀、记号笔、电池、胶带等(自备)
三、实验过程
课题一:利用反射式光电传感器设计一款自动行驶的小车
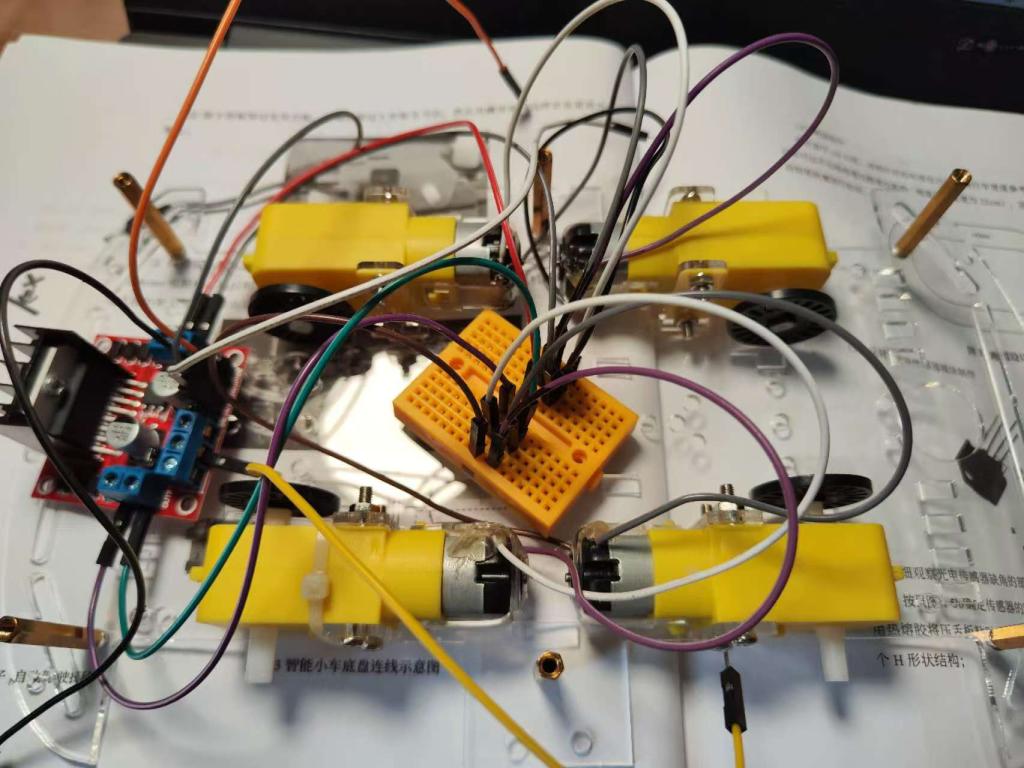
1. 连接电路,将 Arduino 主控板、电机、传感器等元件正确接线。
2. 组装小车底盘、电机、面板、车轮,并安装反射式光电传感器。
3. 根据自动行驶的功能需求编写并上传程序。
4. 使用直尺、记号笔等工具设计并制作实验跑道。
5. 对小车进行通电测试,根据运行情况不断调整程序,使小车稳定行驶
课题二:探究距离传感器类型对自动小车防碰撞效果的影响
1. 在小车上安装超声波传感器,连接电路并完成程序调试,使小车处于初始正常工作状态。
2. 在室内环境下,于小车正前方 50 厘米处放置同一障碍物,启动小车进行防碰撞测试。
3. 观察并记录小车是否发生碰撞,以及小车停下时与障碍物的距离,重复实验 3 次,取平均值。
4. 改变实验环境,分别在室外、嘈杂与安静等不同条件下,重复上述实验并记录数据。
5. 取下超声波传感器,更换为红外距离传感器,在相同条件下重复以上实验步骤,对比两种传感器的防碰撞效果。
课题三:制作可跟随人行驶的智能小车
1. 拆除小车上之前实验使用的超声波传感器、红外传感器等元件。
2. 使用压舌板制作并安装手机支架,将手机固定在小车上。
3. 将手机调试至开发者模式,完成相关参数设置与程序调试。
4. 设置一系列不同的 confidence 数值梯度,如 30%、40%、50%、60% 等,在每个数值下进行小车跟随测试,每组重复三次。
5. 观察并记录小车是否能直线追踪、能否完成左右转弯追踪,以及是否会被第二人干扰等情况。
四、实验结果
(一)课题一:反射式光电传感器自动行驶小车实验结果
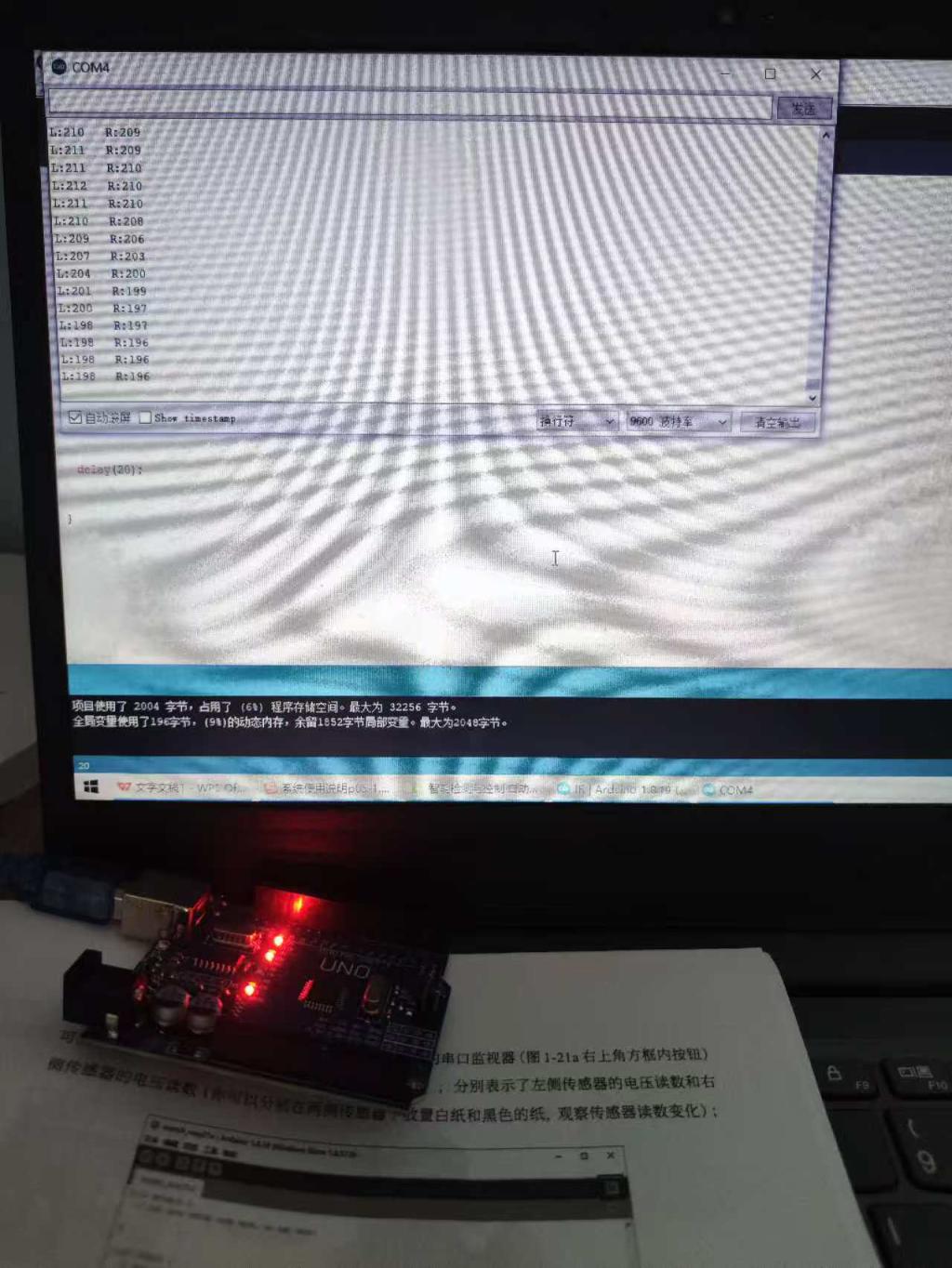
本课题通过10个版本的程序调试,逐步优化反射式光电传感器的电信号强度参数,最终实现小车稳定完成跑道行驶。
程序版本 |
完成比赛情况(3次重复) |
单圈平均完成时间 |
核心现象 |
1-5 |
多次压线、出线 |
1min15s-2min15s |
行驶轨迹偏移明显,稳定性差 |
6-9 |
偶发压线,无出线 |
1min19s-1min35s |
轨迹贴合度提升,速度趋于稳定 |
10 |
3次均胜利完成 |
1min15s |
行驶轨迹精准,全程稳定无偏移 |
表1 自动驾驶小车调试实验结果汇总
结果:
随着程序版本迭代,小车行驶稳定性不断提升,最终在版本10实现稳定、无压线、无出线的自动行驶,达到预期效果。
(二)课题二:不同距离传感器对小车防撞效果的影响实验结果
本课题在室内、室外、安静、嘈杂等多种环境下,对超声波传感器与红外距离传感器进行对比测试,每组实验重复3次并取平均值。
实验环境 |
传感器类型 |
碰撞次数 (3次) |
有效停车距离平均值(cm) |
核心表现 |
白天室外且安静 |
超声波距离传感器 |
0 |
9.1 |
防撞精准,无碰撞 |
红外距离传感器 |
2 |
3.4 |
易误判,碰撞率高 |
|
白天室外且嘈杂 |
超声波距离传感器 |
2 |
5.2 |
受环境干扰,防撞失效。 |
红外距离传感器 |
3 |
— |
完全失效,全程碰撞。 |
|
室内拉窗帘,安静 |
超声波距离传感器 |
1 |
10.05 |
防撞效果较好,偶发失误。 |
红外距离传感器 |
0 |
8.43 |
环境适配性增强,无碰撞 |
|
室内拉窗帘嘈杂 |
超声波距离传感器 |
3 |
8.5 |
受噪音干扰完全失效。 |
红外距离传感器 |
3 |
4.9 |
受嗯环境干扰,全程碰撞。 |
表2 不同传感器防撞测试结果
结果:
超声波传感器在安静环境下防撞效果更稳定;红外传感器更适合室内安静环境;嘈杂、强光等复杂环境对两种传感器均有明显干扰。
(三)课题三:可跟随人行驶的智能小车实验结果
本实验设置30%、40%、50%、60%、70%、80%、90%、100%共8个置信度梯度,每组重复3次,记录小车追踪效果。
置信度(%) |
直行追踪完成率 |
左转追踪完成率 |
右转追踪完成率 |
抗第二人干扰率 |
核心表现 |
30 |
33.3% |
0% |
0% |
100% |
仅能偶尔直行,无转弯能力 |
40 |
66.7% |
33.3% |
33.3% |
100 |
直行较稳定,转弯能力弱 |
50 |
66.7% |
66.7% |
66.7% |
33.3 |
追踪能力均衡,易被干扰 |
60 |
100% |
100% |
100% |
33.3 |
直行、左转稳定,右转一般 |
70 |
100% |
100% |
100% |
0 |
全场景追踪效果好 |
80 |
100% |
100% |
100% |
0 |
追踪最稳定,易被干扰 |
90 |
100% |
100% |
100% |
33.3 |
追踪稳定,抗干扰小幅回升 |
100 |
100% |
66.7% |
66.7% |
33.3 |
直行稳定,转弯能力下降 |
表3 人体追踪小车测试结果
结果:
置信度越低,抗干扰能力越强,但追踪效果越差;置信度越高,追踪越灵敏,但越容易被他人干扰。70%~80%为单人跟随的最优区间。
五、结论
课题一实验结论:
通过组装小车、连接电路、编写程序、设计跑道和多次测试调整,小车能够利用反射式光电传感器实现沿跑道自动行驶,达到了课题设计的预期目标。
课题二实验结论:
通过多组对比实验可以得出,不同距离传感器的防碰撞效果存在明显差异,且受环境影响较大,超声波传感器整体防撞效果更稳定。
课题三实验结论:
confidence 值在 60%~70% 左右时,小车的直线、转弯跟踪效果更均衡,总体跟踪效果更好。
六、参考文献
[1] 陈广祥,张治斌.基于红外反射式传感器的循迹车系统设计[J].中国工控网,2010.
[2] 赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013,28(5):1-4.
[3] Arduino毕业设计——基于Arduino+PID+AI的自动驾驶小车[D].CSDN,2025.