于Arduino开发板的自动驾驶技术研究——反射式光电传感器循迹小车实验研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
于Arduino开发板的自动驾驶技术研究——反射式光电传感器循迹小车实验研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
李泽洋 |
男 |
高一14 |
组长 |
zp05g05n0201 |
|
薛博文 |
男 |
高一14 |
组员 |
zp05g05n0202 |
|
夏浩强 |
男 |
高一14 |
组员 |
zp05g05n0203 |
|
王梓安 |
男 |
高一14 |
组员 |
zp05g05n0204 |
|
胡莫涵 |
男 |
高一14 |
组员 |
zp05g05n0205 |
|
指导老师 |
刘晓涵 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
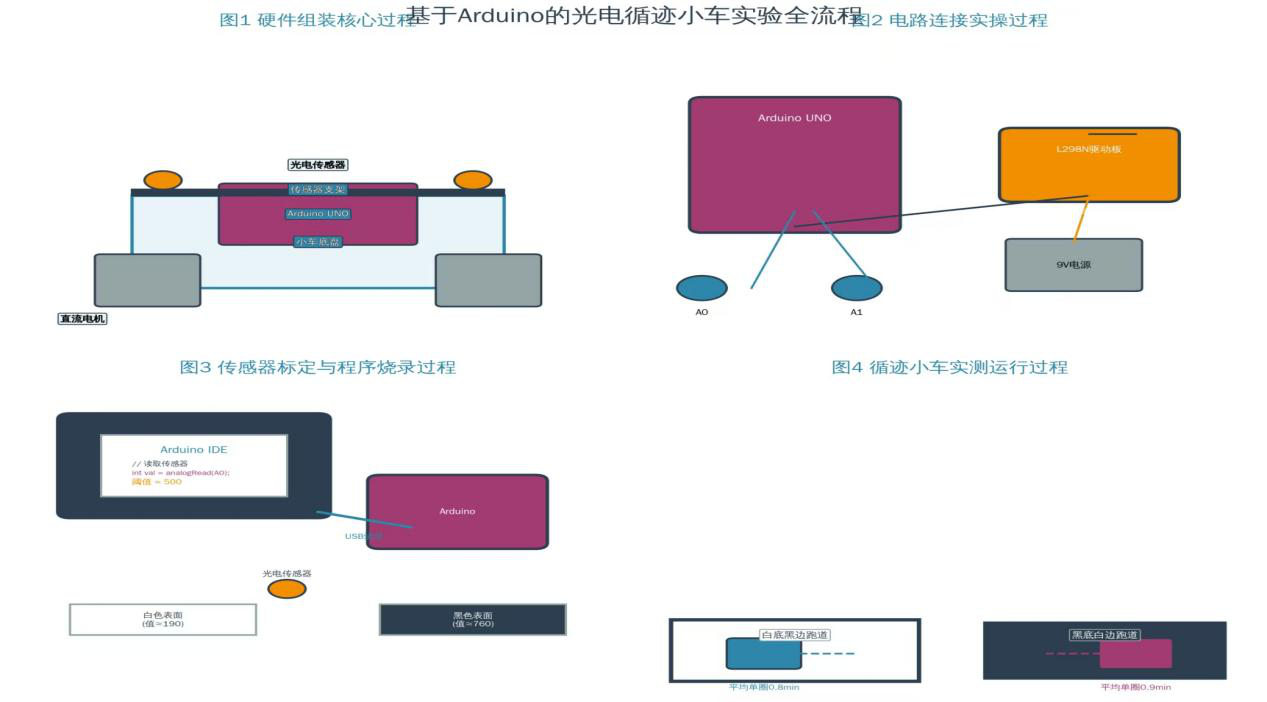
研究目的: 1. 探究自动驾驶技术中“感知-决策-执行”的核心闭环控制逻辑。 2. 掌握Arduino UNO开发板的使用、反射式光电传感器的应用及电路搭建技术。 3. 分析程序参数与跑道底色对循迹效果的影响,实现小车在不同底色跑道的自主循迹。 主要内容: 1. 搭建基于Arduino的循迹小车硬件系统,完成传感器与电机驱动板的电路连接。 2. 探究光电传感器在黑白表面的电压输出规律,确定循迹阈值。 3. 编写并优化控制程序,实现白底黑边跑道的稳定循迹及黑底白边跑道的程序适配。 |
||||
研 究 假 设 |
基于Arduino开发板与反射式光电传感器搭建的循迹小车,能精准识别跑道边缘,实现无误差自主循迹,且可直接适配不同底色的跑道循迹需求。 |
||||
研 究 方 法 |
实验法、文献研究法、小组讨论法、控制变量法 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月30日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片。 二、9月1日-9月10日 加入课题微信群、组建课题小组,参加课题群科学第一课。 三、9月1日-10月8日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成实验探究的课程学习和课题任务的节点任务提交; 4. 利用科探方舟盒子完成课题探究实验。 四、10月11日-11月9日 进行课题研究进展线上中期汇报。 五、11月13日-11月20日 成果制作和修改 六、11月14日-11月30日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、12月初 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
研究报告(论文)、PPT演示文稿、实验数据手册、循迹小车实物 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于Arduino开发板的自动驾驶技术研究——反射式光电传感器循迹小车实验研究 |
编号:zp05g05n02 |
||
活动时间:11月1日 |
第 3 次 |
活动地点:教室 |
|
指导教师:刘晓涵 |
班级:高一14班 |
||
参加活动成员: 薛博文、李泽洋、夏浩强、王梓安、胡莫涵 |
|||
活动内容: 1. 活动目的:验证循迹小车的自主循迹能力,探究程序参数、跑道底色对循迹效果的影响,解决转向偏差、识别错误等核心问题。 2. 活动形式:分组实验、线上数据汇总、小组集中讨论。 3. 活动过程: ① 分工协作:硬件组调试电路,编程组优化代码,测试组开展对照实验。 ② 数据汇总:集中展示5版程序的测试数据、循迹视频片段。 ③ 问题研讨:针对“转向过急”“黑底白边识别失败”等问题,确定“延长转向时间”“反转阈值逻辑”的优化方案。 4. 活动结果: ① 结论:成功实现自动驾驶“感知-决策-执行”闭环控制;程序参数优化与阈值逻辑调整是提升循迹效果的关键。 ② 问题解决:解决了传感器阈值适配与跨跑道底色兼容问题。 ③ 假设修正:原“无误差循迹”假设不成立,小车受硬件精度影响存在微小偏差。 ④ 新问题提出:如何通过PID算法或多传感器融合进一步提升循迹精度? 记录者: 薛博文 |
|||
注:1、由课题组长负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
基于Arduino开发板的自动驾驶技术研究——反射式光电传感器循迹小车实验研究 |
编号:zp05g05n02 |
||||
课题组成员 |
组长:李泽洋 |
组员:薛博文、夏浩强、王梓安、胡莫涵 |
|||
指导教师:刘晓涵 |
报告执笔人: 李泽洋 |
完成时间:12月8日 |
|||
主导课程:自动驾驶技术与智能控制 |
相关课程:信息技术、物理、数学 |
||||
(一)书面材料 |
|||||
课题成果: 1. 预期成果:完成循迹小车搭建,编写单一程序实现不同底色跑道的无误差自主循迹。 2. 实际成果: ① 硬件成果:成功搭建硬件系统,解决了接线接触不良、电机卡滞等问题。 ② 实验成果:确定光电传感器黑白识别阈值为500;优化后小车在白底黑边跑道平均单圈时间0.8分钟,黑底白边跑道平均单圈时间0.9分钟,实现稳定循迹(存在微小偏差)。 ③ 理论成果:明确了光电循迹的物理原理与程序适配逻辑。 |
|||||
参考书目及资料: 1. [1] Arduino官方团队.《Arduino UNO R3使用手册》[Z].2023.[2] 吕栋腾.《智能检测技术与应用》[M].西北大学出版社,2024.[3] 张晓东.《基于Arduino的智能循迹小车设计与实现》[J].电子制作,2022.4. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1份)、实验原始记录(3份)、测量数据(3份)、程序代码(1份)。 |
|||||
(二)实物材料 编号:C名称:光电循迹效果影响因素探究成果集 制作者:薛博文、李泽洋、夏浩强、王梓安、胡莫涵 内容:传感器电压变化图示、程序版本对比图、小车组装图、实验照片集。 功能:直观展示研究过程与核心结论,辅助成果汇报。 |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明):1. 硬件:循迹小车实物、白底黑边/黑底白边跑道各1套。2. 软件:安装Arduino IDE的电脑1台(用于展示代码)。3. 设备:投影仪1台(用于PPT与数据展示)。 |
|||||
第四部分 学术论文成果
基于Arduino开发板的自动驾驶技术研究——反射式光电传感器循迹小车实验研究
作者:薛博文、李泽洋、夏浩强、王梓安、胡莫涵
单位:徐州市第一中学 高一14班
指导教师:刘晓涵
摘要
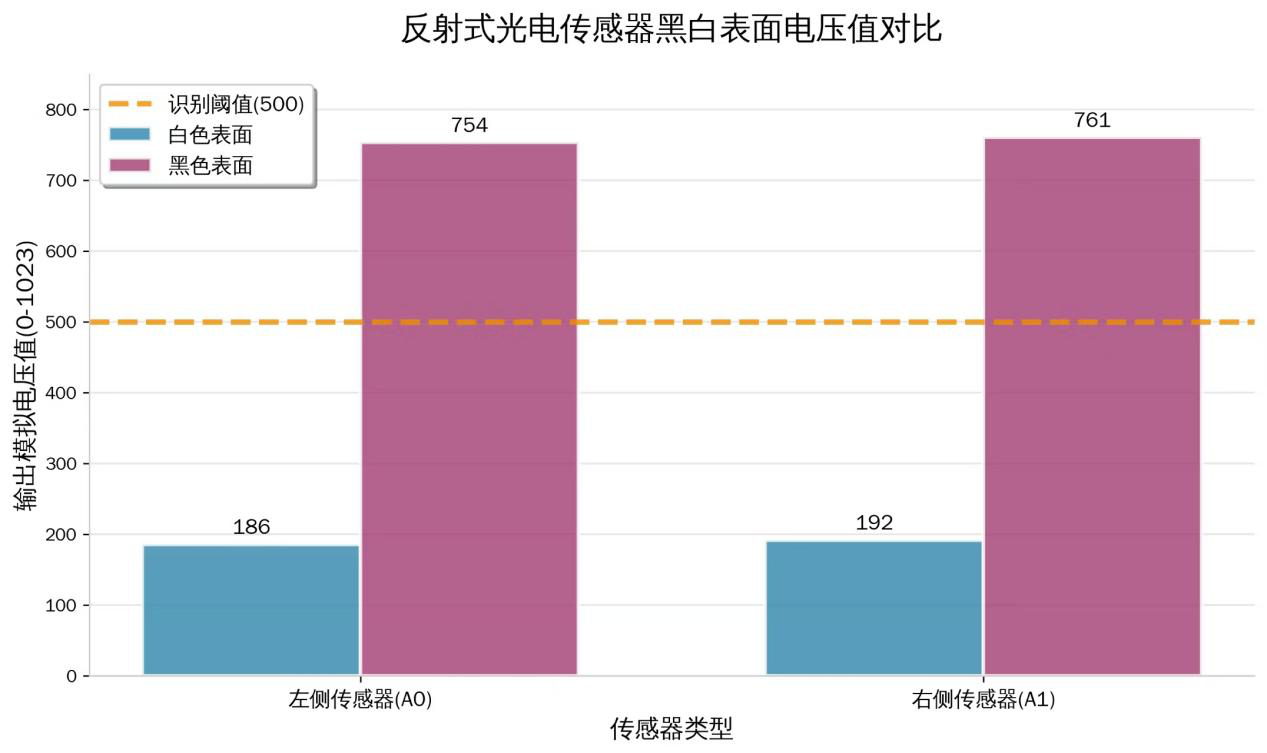
自动驾驶技术的核心是“感知-决策-执行”的闭环控制。本研究以Arduino UNO R3开发板为控制核心,搭载反射式光电传感器与L298N电机驱动板,搭建智能循迹小车实验平台。通过控制变量法,探究了光电传感器在不同颜色表面的电压输出规律,确定了黑白识别阈值,并完成了循迹程序的编写与优化。研究结果表明:反射式光电传感器在白色表面输出低模拟值(约190),在黑色表面输出高模拟值(约760),以500为阈值可实现精准识别;优化转向时间与电机转速后,小车可在白底黑边跑道稳定循迹(平均单圈0.8分钟);通过反转阈值判断逻辑,可实现黑底白边跑道的无缝适配。本研究验证了低成本硬件实现自动驾驶基础功能的可行性,深化了对智能控制逻辑的理解。
关键词:Arduino;自动驾驶;反射式光电传感器;循迹小车;阈值逻辑
一、研究背景
自动驾驶技术是人工智能领域的研究热点,其核心在于通过传感器获取环境信息,经控制器处理后驱动执行器完成动作。商用自动驾驶系统依赖激光雷达、高清摄像头等高端设备,门槛较高。Arduino作为开源嵌入式平台,具有低成本、易上手的特点,搭配反射式光电传感器,可构建简易循迹小车,模拟自动驾驶的核心逻辑。
高中阶段开展此项研究,不仅能将物理(光的反射)、信息技术(编程与电路)、数学(数据处理)等学科知识融会贯通,还能培养跨学科实践能力与团队协作精神。本研究旨在通过搭建循迹小车,探索光电循迹的原理与优化方法,为自动驾驶技术的入门学习提供实践参考。
二、实验材料与设备
本实验所用器材均由徐州市第一中学提供,核心材料如下:
控制单元:Arduino UNO R3开发板、方口USB数据线;
感知单元:反射式光电传感器(2个)、10kΩ电阻、220Ω电阻、公对母杜邦线;
执行单元:智能小车套件(车轮、直流电机、亚克力底板)、L298N电机驱动板;
辅助材料:9V电池、电池扣、热熔胶、压舌板、A4白纸、黑胶带、秒表。
三、研究过程与方法
本研究采用递进式实验设计,分为硬件搭建、传感器标定、程序优化三个阶段,全程采用控制变量法,确保实验结果的有效性。
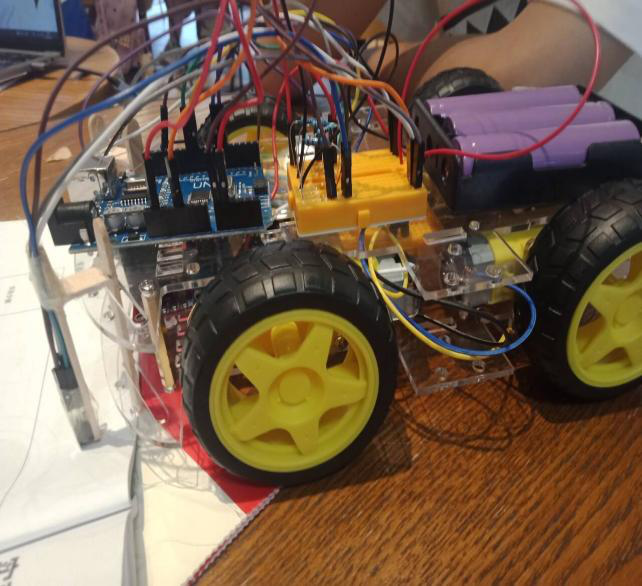
(一)阶段一:循迹小车硬件系统搭建
底盘组装:将直流电机通过T形板固定在亚克力底板,安装车轮,搭建双层硬件支架。
传感器固定:用热熔胶将压舌板制作成H形支架,将两个光电传感器对称固定于小车车头,确保离地高度一致(约2mm)。
电路连接:
传感器电路:5V电源串联10kΩ电阻接传感器1号引脚,2号引脚接地,4号引脚串联220Ω电阻后分别接入Arduino A0、A1端口。
电机电路:L298N驱动板与Arduino数字端口(ENA=5、ENB=6、IN1-IN4=8-11)连接,驱动板接电机与9V电源。
(二)阶段二:光电传感器黑白识别阈值标定
实验设计:将传感器分别对准白色白纸与黑色胶带,使用Arduino IDE的analogRead()函数读取输出值。
数据采集:每个表面重复测试3次,记录并计算平均值。
阈值确定:根据数据差异,确定黑白识别的核心阈值。
实验数据:
检测表面 |
左侧传感器(A0)平均值 |
右侧传感器(A1)平均值 |
白色白纸 |
186 |
192 |
黑色胶带 |
754 |
761 |
结论:黑白表面数值差异显著,确定500为识别阈值。
(三)阶段三:循迹程序编写与优化
基础程序编写:基于阈值编写“直行-左转-右转-停止”的控制逻辑,烧录至开发板。
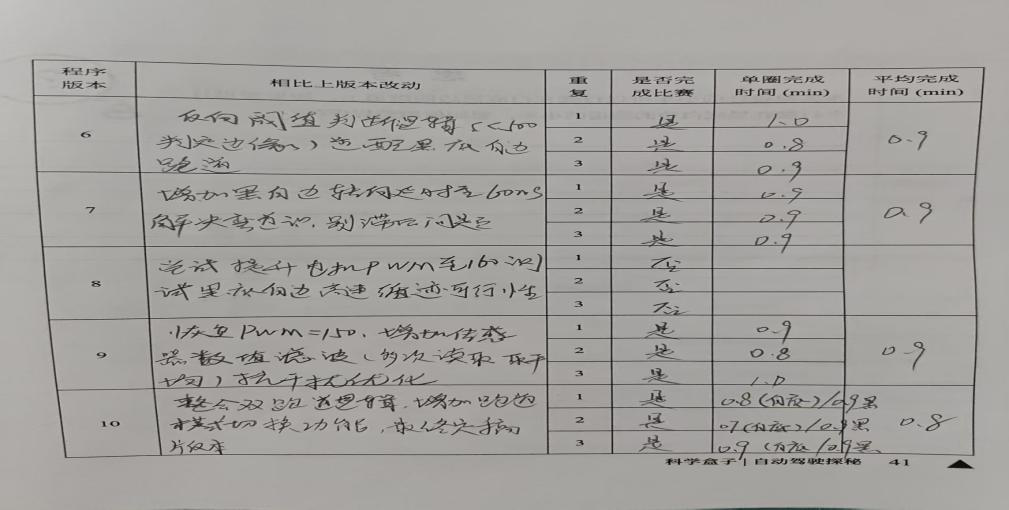
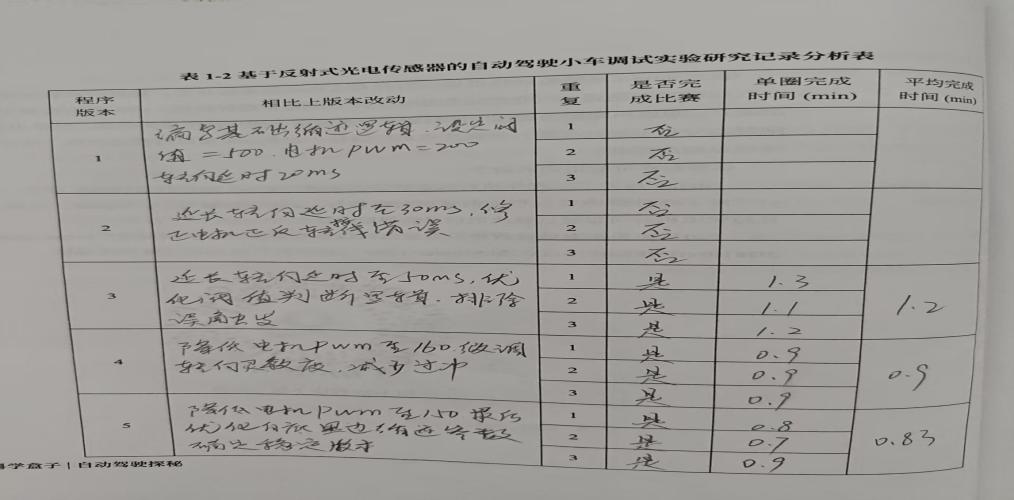
参数优化实验:针对基础程序“转向过急”的问题,调整转向时间(delay值)与电机转速(PWM值),共迭代5版程序,每版测试3次。
跨底色适配实验:制作黑底白边跑道,测试基础程序适配性,通过反转阈值逻辑编写适配程序。
核心程序逻辑:
白底黑边:模拟值 > 500 → 识别为边缘,执行转向。
黑底白边:模拟值 < 500 → 识别为边缘,执行转向。
四、实验结果与分析
(一)硬件搭建结果
成功完成硬件系统组装,解决了接线接触不良、传感器偏移、电机卡滞等问题。Arduino开发板可正常接收传感器信号并驱动电机,硬件系统稳定可靠,为后续实验奠定了基础。
(二)程序优化结果
程序版本 |
改动内容 |
白底黑边循迹结果 |
平均单圈时间 |
V1.0 |
基础逻辑,PWM=200,delay=20ms |
无法完成循迹(转向过急) |
- |
V3.0 |
延长转向时间至50ms |
可完成循迹,存在轻微偏差 |
1.2分钟 |
V5.0 |
降低PWM至150,优化阈值逻辑 |
稳定循迹,偏差极小 |
0.8分钟 |
分析:电机转速过快会导致转向精度不足,转向时间过短无法完成纠偏。通过降低转速、延长转向时间,可显著提升循迹稳定性。
(三)跨底色适配结果
跑道类型 |
程序逻辑 |
循迹结果 |
平均单圈时间 |
黑底白边 |
阈值反转(<500为边缘) |
稳定循迹 |
0.9分钟 |
分析:跑道底色切换后,边缘与背景的反射率属性互换。仅通过反转阈值判断逻辑,无需改动硬件,即可实现适配,验证了程序设计的灵活性。
(四)研究假设验证
原假设“实现无误差自主循迹”不成立。实验发现,小车受传感器精度、机械组装偏差、地面摩擦力等因素影响,存在微小的循迹偏差,但该偏差在可接受范围内,不影响核心功能实现。
五、研究结论
物理原理层面:反射式光电传感器的输出值与表面反射率呈负相关,白色表面输出低模拟值,黑色表面输出高模拟值,通过设定合理阈值(本研究为500),可实现跑道边缘的精准识别。
技术实现层面:基于Arduino的循迹小车,通过“感知-决策-执行”的闭环控制,可实现自动驾驶基础的循迹功能。程序参数(转向时间、电机转速)的优化是提升循迹性能的关键。
适配性层面:面对不同底色的跑道,无需改变硬件结构,仅通过反转阈值判断逻辑,即可完成程序适配,实现跨场景循迹。
局限性层面:低成本循迹小车无法实现绝对“无误差”循迹,受硬件与环境因素影响,存在微小偏差,这是后续优化的核心方向。
六、研究展望
本研究搭建的循迹小车为基础智能系统,未来可从以下方向进行优化:
算法升级:引入PID控制算法,根据传感器偏离阈值的程度动态调整转向,实现偏差的实时修正。
硬件拓展:增加超声波传感器,实现循迹与避障的融合;为传感器加装遮光罩,提升抗光干扰能力。
功能升级:搭载蓝牙模块,实现远程控制与数据传输;构建多传感器阵列,适配复杂弯道与岔路跑道。
Arduino智能小车作为自动驾驶技术的入门载体,具有广阔的教育与研究价值。未来,可进一步结合人工智能算法,探索更高级的自主导航技术,为智能设备的研发奠定基础。
参考文献
[1] Arduino Official Team. Arduino UNO R3 User Manual[Z]. 2023.
[2] 吕栋腾. 智能检测技术与应用[M]. 西安:西北大学出版社, 2024.
[3] 张晓东. 基于Arduino的智能循迹小车设计与实现[J]. 电子制作, 2022, (08): 45-47.
[4] 教育部基础教育课程教材发展中心. 普通高中综合实践活动课程指导纲要[Z]. 2017.
附录:
实验场景记录


实验过程
数据记录
原始数据