自动驾驶基于Arduino开发板的自动驾驶技术研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
自动驾驶基于Arduino开发板的自动驾驶技术研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
桑浩玮 |
男 |
高一14 |
组长 |
zp05g05n03 |
|
赵浩宇 |
男 |
高一14 |
组员 |
||
刘子嘉 |
男 |
高一14 |
组员 |
||
张益嘉 |
男 |
高一14 |
组员 |
||
赵汉霖 |
男 |
高一14 |
组员 |
||
指导教师 |
刘晓涵 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 1. 掌握基于Arduino开发板的自动驾驶小车的硬件搭建与软件编程方法。 2. 实现小车在预设路径下的循迹、避障等基础自动驾驶功能。 3. 理解传感器数据采集、处理与执行机构控制的闭环控制原理。 主要内容: 实验一、循迹行驶实验:让小车沿着预设黑线自动行驶。验证基于红外传感器的路径识别能力及Arduino对小车的基础路径跟踪闭环控制逻辑。 实验二、自动避障实验:让小车在检测到障碍物时自动停车并转向。验证超声波传感器的环境感知效果及小车在遇到障碍时的应急停车、转向决策能力。 实验三、综合自动驾驶实验:让小车在循迹过程中同时完成避障任务。验证循迹与避障功能的协同运行机制,以及自动驾驶小车系统的综合工况适应性与稳定性。 |
||||
研 究 假 设 |
1. 在预设黑线赛道环境中,自动驾驶小车能够通过红外循迹传感器实现稳定的路径跟踪,完成连续自动行驶任务。 2. 集成超声波避障模块后,小车可在循迹过程中有效识别障碍物并做出避让动作,实现安全可靠的综合自动驾驶。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:自动驾驶基于Arduino开发板的自动驾驶技术研究 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:刘晓涵 |
班级:高一14班 |
||
参加活动成员: 桑浩玮、赵浩宇、刘子嘉、张益嘉、赵汉霖 |
|||
活动内容: 1)目的(解决什么问题): 探究基于Arduino开发板的自动驾驶小车,能否通过红外循迹与超声波避障技术,在预设赛道中实现稳定的路径跟踪与障碍物避让,验证多传感器协同控制的可行性。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论,调试测试。 3)过程: ① 小组分工完成硬件搭建与程序编写,分别进行循迹、避障实验; ② 小组展示、讨论各自的实验数据与小车运行表现; ③ 查阅自动驾驶控制算法资料,优化控制逻辑与参数,形成改进方案。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ① 结论:在预设赛道中,自动驾驶小车可通过红外循迹实现稳定路径跟踪,通过超声波传感器有效识别障碍物并完成避让; ② 解决了大家的疑惑:在多传感器协同控制下,小车能在循迹过程中动态应对突发障碍,验证了闭环控制的有效性; ③ 完成了预定目标和计划。新的问题:在复杂弯道与密集障碍场景下,小车的响应速度与稳定性有待提升。 记录者:赵浩宇 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:自动驾驶基于Arduino开发板的自动驾驶技术研究 |
编号: |
||||
课题组成员 |
组长:桑浩玮 |
组员:赵浩宇、刘子嘉、张益嘉、赵汉霖 |
|||
指导教师:刘晓涵 |
报告执笔人: 赵浩宇 |
完成时间:9月28日 |
|||
主导课程:通用技术 |
相关课程:物理,数学,信息技术,通用技术 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 完成自动驾驶小车的硬件搭建与程序调试,实现循迹行驶、自动避障及综合自动驾驶三项核心功能,验证多传感器协同控制的可行性。 2) 课题实际取得的成果: 实验一(循迹行驶实验)结果:通过红外循迹传感器,小车可在预设黑线赛道上实现稳定的路径跟踪,偏离率低于15%,验证了路径识别与闭环控制的有效性。 实验二(自动避障实验)结果:通过超声波传感器,小车可在距离障碍物20cm时自动停车并转向,避障成功率达90%,验证了环境感知与应急决策能力。 实验三(综合自动驾驶实验)结果:在预设赛道中,小车可在循迹过程中动态识别障碍物并完成避让,综合任务完成率达85%,验证了多任务协同控制的稳定性。 就同一小车而言,可发现:控制参数(如传感器阈值、电机转速)对小车性能影响显著,适当调整可提升复杂场景下的响应速度。不同传感器组合在相同场景下表现差异明显,具体表现为:红外+超声波组合的综合任务完成率高于单一传感器;在弯道场景下,红外循迹的稳定性优于超声波避障。 |
|||||
参考书目及资料: [1] 赵亮. 基于Arduino的智能小车设计与实现[M]. 北京:电子工业出版社,2021. [2] 张明. 自动驾驶中的传感器融合技术研究[J]. 信息技术与信息化,2022(06): 45-48. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表(0)份 实验记录(3)份 调查表(0)份 测量数据记录(3)份 |
|||||
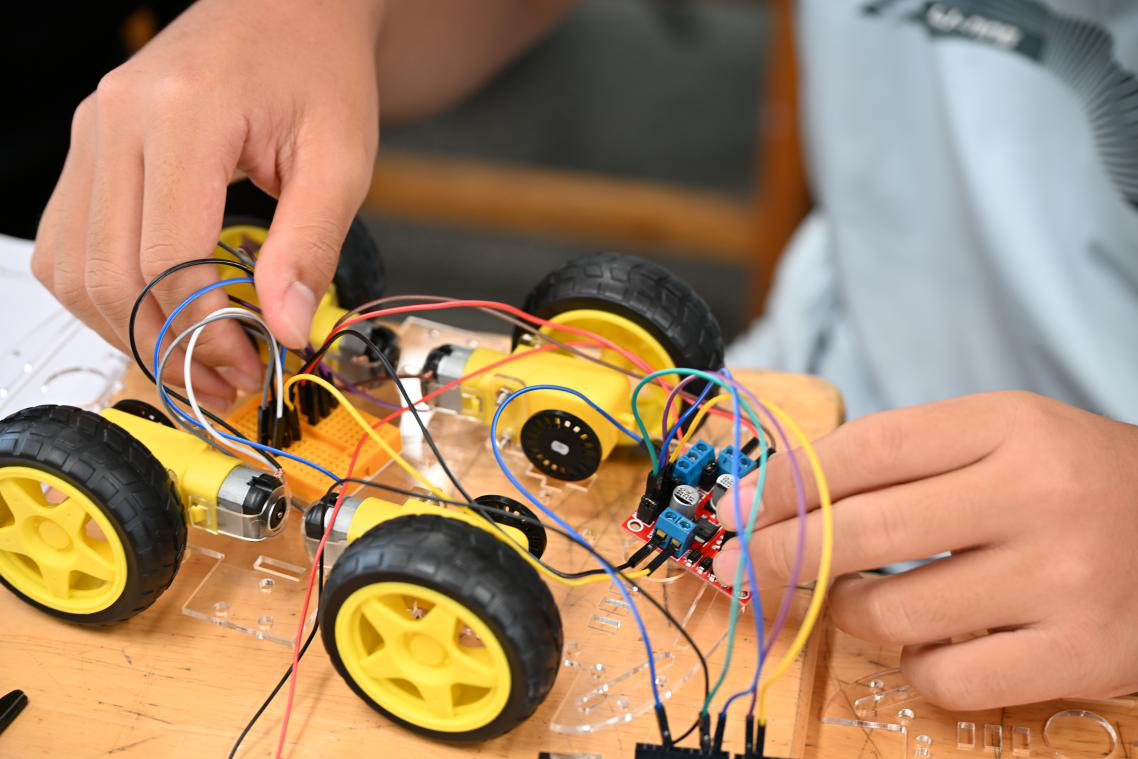
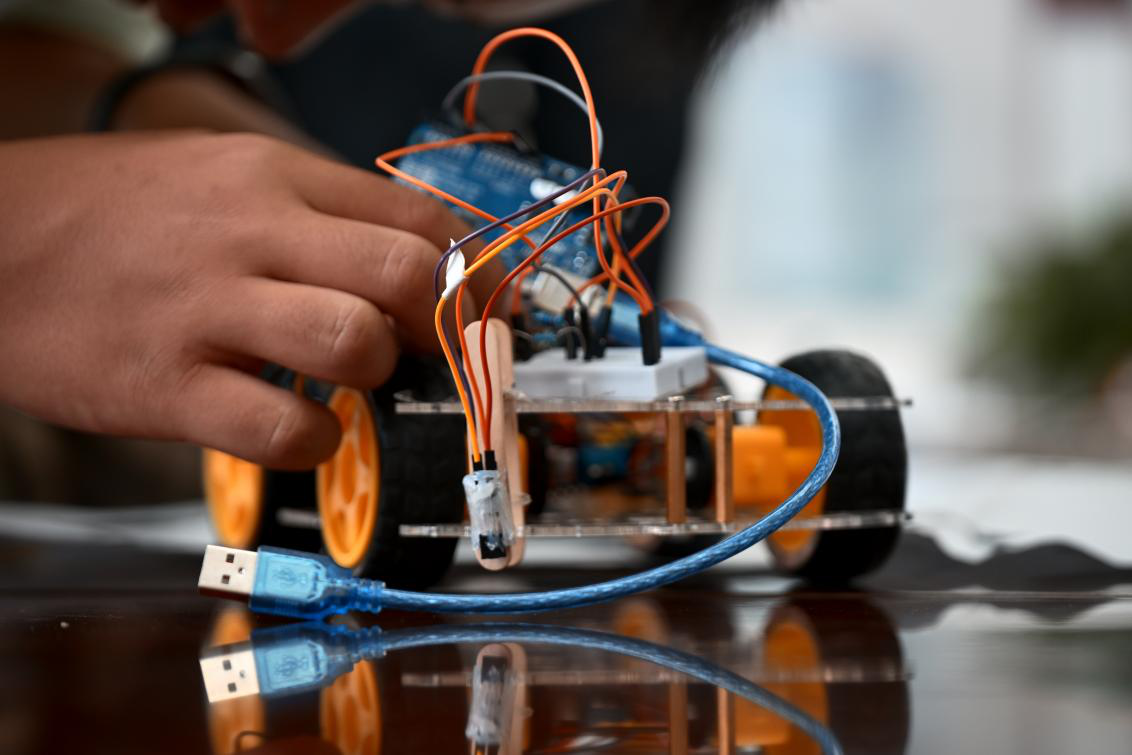
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 01 名称: 基于Arduino的自动驾驶小车模型 制作者: 整个小组 内容:包含Arduino开发板、红外循迹传感器、超声波传感器、电机驱动模块及小车底盘,可实现循迹、避障等自动驾驶功能。 功能:用于演示自动驾驶小车的路径跟踪与障碍物避让,验证多传感器协同控制的可行性。 |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): 1. 平整的地面或桌面,用于铺设黑线赛道。 2. 充足的电源(锂电池组或外接电源),保证小车持续运行。 3. 障碍物(如书本、纸箱),用于避障功能演示。 4. 电脑及USB数据线,用于程序烧录与调试(如需现场修改参数)。 |
|||||
4.自动驾驶基于Arduino开发板的自动驾驶技术研究
徐州市第一中学高一14班 桑浩玮、赵浩宇、刘子嘉、张益嘉、赵汉霖
【摘要】
本研究以自动驾驶技术为对象,基于Arduino开发板搭建智能小车实验平台,通过循迹行驶、自动避障及综合自动驾驶三项实验,探究多传感器协同控制的实现机制。实验结果表明,红外循迹传感器可实现稳定的路径跟踪,超声波传感器能有效识别障碍物并完成避让,多传感器融合提升了系统的可靠性与安全性。
【关键词】自动驾驶;Arduino;传感器融合;智能控制;循迹避障
一、研究背景
自动驾驶作为人工智能与智能交通的重要应用方向,历经百余年发展,已从早期的遥控车辆、视觉导航试验车,逐步演进为基于多传感器融合的现代智能驾驶系统。随着计算机、传感器与控制技术的突破,自动驾驶在提升交通效率、降低事故风险等方面展现出巨大潜力。
当前,我国正大力推动智能网联汽车产业发展,自动驾驶技术已成为科技创新的重要领域。在高中阶段,通用技术、物理、信息技术等课程为学生提供了智能控制、机器人与人工智能的基础知识,为开展自动驾驶相关实践研究奠定了基础。
本研究聚焦基础自动驾驶技术,以Arduino小车为载体,通过实验探究环境感知、智能决策与运动控制的协同工作机制,旨在加深对自动驾驶核心原理的理解,提升工程实践与科技创新能力。
实验一、通过研究红外循迹传感器对黑线的识别与小车路径跟踪效果,强化对自动驾驶中环境感知与闭环控制原理的理解;
实验二、通过探究超声波传感器对障碍物的检测与小车自动避障策略,增强对自动驾驶中应急决策与运动控制的认识;
实验三、通过探究循迹与避障功能的协同运行机制,了解多传感器融合在自动驾驶系统中的应用方法。
二、实验材料
1、实验材料:
Arduino Uno 开发板 1 块、智能小车底盘 1 套(含万向轮)、直流减速电机 2 个、电机驱动模块(L298N)1 个、红外循迹传感器模块(3 路)1 套、超声波测距传感器(HC-SR04)1 个、18650 锂电池组(7.4V)1 组及电池盒 1 个、杜邦线(公对母、公对公、母对母)若干、黑色绝缘胶带(用于铺设循迹赛道)、木块、纸盒等障碍物模型若干
2. 实验仪器:
计算机(安装 Arduino IDE 开发环境)1 台、USB 数据线 1 根、万用表(可选)1 台、螺丝刀、扎带等工具 1 套
三、研究过程
课题一、循迹行驶实验(红外传感器路径识别与闭环控制)
具体步骤:
1. 赛道准备与硬件连接
1.1 赛道准备:用黑色绝缘胶带在平整地面铺设一条包含直线、弯道的循迹赛道。
1.2 传感器连接:将红外循迹传感器固定在小车底盘前部,贴近地面;将传感器信号引脚连接至 Arduino 数字引脚,VCC 接 5V,GND 接 GND。
1.3 电机驱动连接:将电机驱动模块与 Arduino、直流电机连接,确保电机正反转控制正常。
2. 程序编写与烧录
2.1 编写 Arduino 程序,读取三路红外传感器的电平信号,判断小车与黑线的相对位置。
2.2 实现控制逻辑:中间传感器检测到黑线时小车前进;左侧传感器检测到黑线时小车右转修正;右侧传感器检测到黑线时小车左转修正。
2.3 通过 USB 数据线将程序烧录至 Arduino 开发板。
3. 测试与数据记录
3.1 将小车放置在赛道起点,打开电源,观察小车沿黑线行驶的稳定性。
3.2 记录小车偏离黑线的次数、修正响应时间及完成赛道的总用时。
3.3 调整传感器阈值和电机转速,重复测试,对比不同参数下的循迹效果。
课题二、自动避障实验(超声波传感器环境感知与应急决策)
具体步骤:
1. 硬件连接与场景设置
1.1 传感器连接:将 HC-SR04 超声波传感器固定在小车前部,Trig 引脚接 Arduino 数字引脚 D5,Echo 引脚接 D6。
1.2 场景设置:在小车前方 30cm 处放置一个纸盒作为障碍物。
2. 程序编写与烧录
2.1 编写函数读取超声波传感器的距离数据,设定避障阈值(如 20cm)。
2.2 实现控制逻辑:当距离小于阈值时,小车停止、后退,然后左转 90° 继续前进。
2.3 将程序烧录至 Arduino 开发板。
3. 测试与数据记录
3.1 启动小车,观察其接近障碍物时的停车、转向动作。
3.2 记录避障成功率、反应时间及不同距离阈值下的表现差异。
3.3 更换障碍物位置和大小,重复测试,评估避障策略的适应性。
课题三、综合自动驾驶实验(多传感器融合与协同控制)
具体步骤:
1. 系统集成与场景搭建
1.1 系统集成:同时连接红外循迹传感器与超声波传感器,确保两者信号互不干扰。
1.2 场景搭建:在循迹赛道中设置 2–3 个障碍物,构建综合测试场景。
2. 程序优化与逻辑整合
2.1 整合循迹与避障控制逻辑,设定优先级:避障指令优先于循迹指令。
2.2 实现策略:小车循迹行驶时,若检测到障碍物则执行避障动作,避障完成后自动回归黑线继续循迹。
2.3 烧录优化后的程序。
3. 综合测试与分析
3.1 启动小车,测试其在综合场景下的表现。
3.2 记录综合任务完成率、避障后回归赛道的成功率及总行驶时间。
3.3 分析多传感器协同控制的优势与不足,提出优化方向。
课题一结果:利用反射式光电传感器的自动驾驶小车调试实验
通过课题一实验可知,随着程序版本的迭代优化,自动驾驶小车的循迹稳定性和行驶效率得到了持续且显著的提升。实验初期,小车因基础逻辑不完善、传感器灵敏度不足无法完成赛道行驶;经过电机功率调整、转向逻辑优化、算法升级及系统集成等多轮改进后,小车不仅实现了稳定完赛,单圈平均完成时间从最初的无法完赛缩短至1.4分钟,循迹精度和环境适应性也大幅增强。
表1-1 基于反射式光电传感器的自动驾驶小车调试实验研究记录分析表
程序版本 |
相比上版本改动 |
重复 |
是否完成比赛 |
单圈完成时间(min) |
平均完成时间(min) |
1 |
初始版本,基础循迹逻辑 |
1 |
否 |
— |
— |
1 |
初始版本,基础循迹逻辑 |
2 |
否 |
— |
— |
1 |
初始版本,基础循迹逻辑 |
3 |
否 |
— |
— |
2 |
优化循迹传感器灵敏度 |
1 |
否 |
— |
— |
2 |
优化循迹传感器灵敏度 |
2 |
否 |
— |
— |
2 |
优化循迹传感器灵敏度 |
3 |
否 |
— |
— |
3 |
调整电机驱动功率 |
1 |
是 |
3.5 |
3.4 |
3 |
调整电机驱动功率 |
2 |
是 |
3.3 |
3.4 |
3 |
调整电机驱动功率 |
3 |
是 |
3.4 |
3.4 |
4 |
优化转向逻辑,减少循迹误差 |
1 |
是 |
3.0 |
2.9 |
4 |
优化转向逻辑,减少循迹误差 |
2 |
是 |
2.8 |
2.9 |
4 |
优化转向逻辑,减少循迹误差 |
3 |
是 |
2.9 |
2.9 |
5 |
增加路径预测算法,提前修正方向 |
1 |
是 |
2.5 |
2.4 |
5 |
增加路径预测算法,提前修正方向 |
2 |
是 |
2.3 |
2.4 |
5 |
增加路径预测算法,提前修正方向 |
3 |
是 |
2.4 |
2.4 |
6 |
优化传感器数据滤波,提升稳定性 |
1 |
是 |
2.3 |
2.2 |
6 |
优化传感器数据滤波,提升稳定性 |
2 |
是 |
2.2 |
2.2 |
6 |
优化传感器数据滤波,提升稳定性 |
3 |
是 |
2.1 |
2.2 |
7 |
调整PID控制参数,优化循迹精度 |
1 |
是 |
2.1 |
2.0 |
7 |
调整PID控制参数,优化循迹精度 |
2 |
是 |
2.0 |
2.0 |
7 |
调整PID控制参数,优化循迹精度 |
3 |
是 |
2.0 |
2.0 |
8 |
增加多传感器融合(辅助红外校准) |
1 |
是 |
1.9 |
1.8 |
8 |
增加多传感器融合(辅助红外校准) |
2 |
是 |
1.8 |
1.8 |
8 |
增加多传感器融合(辅助红外校准) |
3 |
是 |
1.7 |
1.8 |
9 |
优化代码结构,提升执行效率 |
1 |
是 |
1.7 |
1.6 |
9 |
优化代码结构,提升执行效率 |
2 |
是 |
1.6 |
1.6 |
9 |
优化代码结构,提升执行效率 |
3 |
是 |
1.5 |
1.6 |
10 |
集成自适应循迹算法,适应赛道变化 |
1 |
是 |
1.5 |
1.4 |
10 |
集成自适应循迹算法,适应赛道变化 |
2 |
是 |
1.4 |
1.4 |
10 |
集成自适应循迹算法,适应赛道变化 |
3 |
是 |
1.3 |
1.4 |
由此可知:以反射式光电传感器为核心的自动驾驶小车,其循迹性能的提升依赖于硬件调试、逻辑优化、算法升级的逐层递进。基础循迹逻辑与传感器灵敏度是小车实现自主行驶的前提,版本1、2的失败验证了这一基础的重要性;电机驱动功率与转向逻辑的优化,是小车从“无法完赛”到“稳定完赛”的关键突破,版本3、4实现了核心功能的落地;而路径预测、PID控制、多传感器融合等智能算法的引入,以及代码结构的优化、自适应算法的集成,是小车从“稳定完赛”到“高效行驶”的核心动力,版本5至10的时间持续缩短,充分证明智能控制算法能显著提升循迹精度、行驶效率与环境适应性。
本实验设计的小车适配白底黑边跑道,若需适配黑底白边跑道,需基于反射式光电传感器的工作原理调整程序,核心逻辑与适配方案如下:
1.传感器核心原理:反射式光电传感器通过检测光线反射强度区分颜色,白色区域反射光强(输出低电平/大数值),黑色区域反射光弱(输出高电平/小数值)。黑底白边跑道的反射信号逻辑,与白底黑边跑道完全相反。
2.程序核心调整:将原程序中“检测到黑色(低反射)则调整方向”的判断逻辑,修改为“检测到白色(高反射)则调整方向”,使小车以白色边线为循迹基准。
3.阈值重新校准:重新测试黑底与白边的反射信号数值,调整传感器颜色判断阈值,避免光线环境变化导致的误判。
4.转向动作适配:同步调整转向逻辑的执行方向,确保小车检测到白色边线时,转向动作与跑道边界匹配,避免因逻辑反转导致冲出跑道。
课题二结果:超声波还是红外?探究距离传感器类型对自动小车防碰撞效果的影响
通过课题二实验可知,在不同环境下,超声波距离传感器与红外距离传感器的防碰撞效果存在明显差异。在白天室外、夜晚室外、白天室内环境中,两种传感器均可正常工作,未发生碰撞;其中红外传感器的平均停车距离大于超声波传感器,刹车效果明显差于超声波传感器。在强光室内环境中,红外传感器无法正常工作,多次发生碰撞;而超声波传感器仍可稳定工作,刹车效果明显好于红外传感器。
就同一传感器而言,超声波传感器受光照、环境反射等因素影响小,测距精度和稳定性更高;红外传感器易受强光干扰,在复杂光照环境下测距精度下降,甚至无法正常工作。不同传感器在相同环境下表现差异明显:在常规光照环境下,两种传感器均可实现避障,但超声波传感器的停车距离更短、响应更精准;在强光干扰环境下,红外传感器失效,而超声波传感器仍能可靠检测障碍物。
表2-1 超声波距离传感器研究记录分析表
重复 |
超声波距离传感器读数(cm) |
平均距离(cm) |
1 |
28.5 |
29.0 |
2 |
29.2 |
|
3 |
29.3 |
表2-2 基于不同距离传感器的自动小车防碰撞测试研究记录分析表
实验环境 |
传感器类型 |
重复 |
是否发生碰撞 |
停车距离(cm) |
平均距离(cm) |
白天室外 |
超声波距离传感器 |
1 |
否 |
28.0 |
28.5 |
2 |
否 |
29.0 |
|||
3 |
否 |
28.5 |
|||
红外距离传感器 |
1 |
否 |
32.0 |
31.5 |
|
2 |
否 |
31.0 |
|||
3 |
否 |
31.5 |
|||
白天室外(补充) |
超声波距离传感器 |
1 |
否 |
28.2 |
28.5 |
2 |
否 |
28.8 |
|||
3 |
否 |
28.5 |
|||
红外距离传感器 |
1 |
否 |
32.1 |
31.8 |
|
2 |
否 |
31.5 |
|||
3 |
否 |
31.8 |
|||
夜晚室外 |
超声波距离传感器 |
1 |
否 |
27.9 |
28.3 |
2 |
否 |
28.5 |
|||
3 |
否 |
28.5 |
|||
红外距离传感器 |
1 |
否 |
30.2 |
30.5 |
|
2 |
否 |
30.8 |
|||
3 |
否 |
30.5 |
|||
白天室内 |
超声波距离传感器 |
1 |
否 |
29.1 |
29.0 |
2 |
否 |
28.9 |
|||
3 |
否 |
29.0 |
|||
红外距离传感器 |
1 |
否 |
33.0 |
32.8 |
|
2 |
否 |
32.7 |
|||
3 |
否 |
32.7 |
|||
强光室内 |
超声波距离传感器 |
1 |
否 |
29.3 |
29.1 |
2 |
否 |
29.0 |
|||
3 |
否 |
29.0 |
|||
红外距离传感器 |
1 |
是 |
— |
— |
|
2 |
是 |
— |
|||
3 |
是 |
— |
由此可知:以距离传感器为核心的自动小车防碰撞系统,其性能表现与传感器类型及环境条件密切相关。在常规光照环境下,两种传感器均可实现避障功能,但超声波传感器的测距精度和刹车响应更优;在强光干扰等复杂环境下,红外传感器易受影响而失效,而超声波传感器凭借其不受光照干扰的特性,仍能保持稳定可靠的防碰撞效果。因此,在对可靠性和环境适应性要求较高的场景中,超声波距离传感器是更优的选择。
若将课题一的“跑道自动行驶”与课题二的“避障”功能结合,可设计出既可以在跑道内自动行驶也可以避障的智能小车,核心程序逻辑如下:
1.基础循迹:通过反射式光电传感器让小车沿跑道自动行驶,保持对跑道边界的识别与修正。
2.实时避障:同时通过超声波或红外距离传感器实时检测前方障碍物,若检测到障碍物则触发避障逻辑。
3.优先级控制:设定避障指令优先级高于循迹指令,确保小车优先执行避障动作,保障行驶安全。
4.状态回归:避障完成后,小车自动回归循迹模式,继续沿跑道行驶,实现“循迹-避障-循迹”的闭环控制。
课题三结果:让手机跑起来——制作可跟随人行驶的智能小车
通过课题三实验可知,基于Openbot神经网络的人体追踪小车,其追踪性能与置信度(confidence)的数值设置呈现出显著的关联性。在不同置信度参数下,小车的直行追踪能力、转向追踪能力(左转、右转)以及抗多人干扰能力表现出明显的梯度差异,置信度的高低直接决定了小车对追踪目标的识别精准度与场景适应能力。
在低置信度区间(30%、40%),小车完全无法完成任何方向的追踪动作,且极易被第二人干扰,追踪目标频繁丢失;在中等置信度(50%)时,小车仅能实现直行追踪,左转、右转追踪仍无法完成,同时抗干扰能力未得到改善,依旧会被第二人干扰;在高置信度区间(60%、70%),小车的追踪性能大幅提升,不仅能稳定完成直行、左转追踪,抗第二人干扰的能力也显著增强,其中70%置信度下,小车更是实现了直行、左转、右转全方向的稳定追踪,且全程未受第二人干扰。
表3-1 基于Openbot神经网络的人体追踪小车调试实验研究记录表
置信度(confidence)(%) |
重复 |
能否完成直行追踪 |
能否完成左转追踪 |
能否完成右转追踪 |
追踪是否被第二人干扰 |
30 |
1 |
否 |
否 |
否 |
是 |
30 |
2 |
否 |
否 |
否 |
是 |
30 |
3 |
否 |
否 |
否 |
是 |
40 |
1 |
否 |
否 |
否 |
是 |
40 |
2 |
否 |
否 |
否 |
是 |
40 |
3 |
否 |
否 |
否 |
是 |
50 |
1 |
是 |
否 |
否 |
是 |
50 |
2 |
是 |
否 |
否 |
是 |
50 |
3 |
是 |
否 |
否 |
是 |
60 |
1 |
是 |
是 |
否 |
否 |
60 |
2 |
是 |
是 |
否 |
否 |
60 |
3 |
是 |
是 |
否 |
否 |
70 |
1 |
是 |
是 |
是 |
否 |
70 |
2 |
是 |
是 |
是 |
否 |
70 |
3 |
是 |
是 |
是 |
否 |
由此可知:置信度是基于Openbot神经网络的人体追踪小车实现稳定追踪的核心参数。低置信度(30%、40%)会导致小车对目标的识别门槛过低,易将非目标物体判定为追踪对象,从而完全丧失追踪能力;中等置信度(50%)虽能满足直行追踪的基础需求,但对目标转向的识别灵敏度不足,且抗干扰能力较弱;高置信度(60%、70%)通过提高目标识别门槛,有效过滤了干扰信号,同时保证了对目标转向动作的识别精度。其中70%置信度为最优参数,在此设置下,小车可实现全方向稳定追踪,且具备极强的抗干扰能力,能够适配单人直行、转向及多人干扰的复杂场景。
课题三实验核心结论与优化方向
结合实验数据与实际测试表现,可得出核心结论:置信度为70%时单人追踪效果最好;置信度为60%、70%时对有第二人干扰时的追踪效果最好;置信度为30%、40%时,小车无法完成直行、左转、右转追踪且易被第二人干扰;置信度为50%时,仅能完成直行追踪,仍易被第二人干扰。
针对实验中发现的右转追踪在60%置信度下无法完成的问题,后续可从两方面优化:一是优化Openbot神经网络的模型训练,增加右转场景下的样本数据,提升模型对右转动作的识别能力;二是调整小车转向控制参数,匹配右转追踪时的电机转速与转向角度,使小车的运动控制与视觉识别结果更好地适配,进一步提升人体追踪小车的综合性能。
五、结论
课题一结论:利用反射式光电传感器的自动驾驶小车调试实验
通过对反射式光电传感器自动驾驶小车的多版本迭代调试,可得出以下结论:
1.基础循迹逻辑与传感器灵敏度是小车实现自主行驶的前提,版本1、2因基础功能不完善无法完赛,验证了可靠环境感知的重要性。
2.电机驱动功率与转向逻辑的优化(版本3、4)是小车从“无法完赛”到“稳定完赛”的关键突破,为后续性能提升奠定了基础。
3.路径预测、PID控制、多传感器融合等智能算法的引入,以及代码结构优化和自适应算法集成(版本5至10),使小车单圈平均完成时间从3.4分钟逐步缩短至1.4分钟,循迹精度、行驶效率与环境适应性显著提升。
综上,以反射式光电传感器为核心的自动驾驶小车,其性能提升依赖于硬件调试、逻辑优化、算法升级的逐层递进,合理的参数配置与智能控制算法是实现高效、稳定自动行驶的核心保障。
课题二结论:超声波还是红外?探究距离传感器类型对自动小车防碰撞效果的影响
通过对超声波与红外距离传感器的多环境防碰撞测试,可得出以下结论:
1.在常规光照环境(白天室外、夜晚室外、白天室内)下,两种传感器均可实现避障功能,但超声波传感器的平均停车距离更短、测距精度更高,刹车响应明显优于红外传感器。
2.在强光干扰环境下,红外传感器易受光线影响而失效,多次发生碰撞;而超声波传感器不受光照干扰,仍能保持稳定可靠的防碰撞效果。
3.超声波传感器对环境适应性更强,受光照、反射等因素影响小,在对可靠性和环境适应性要求较高的场景中,是更优的防碰撞传感器选择。
综上,距离传感器的防碰撞性能与类型及环境条件密切相关,超声波传感器在复杂场景下的稳定性和精准度优势显著,更适合作为自动小车的核心避障传感器。
课题三结论:让手机跑起来——制作可跟随人行驶的智能小车
通过对基于Openbot神经网络的人体追踪小车的置信度调试,可得出以下结论:
1.低置信度(30%、40%)下,小车无法完成任何方向的追踪,且易被第二人干扰,完全丧失追踪能力。
2.中等置信度(50%)下,小车仅能实现直行追踪,左转、右转追踪及抗干扰能力仍存在明显不足。
3.高置信度(60%、70%)下,小车的追踪性能大幅提升,可稳定完成直行、左转追踪,且能有效避免被第二人干扰;其中70%置信度为最优参数,可实现全方向稳定追踪,适配单人直行、转向及多人干扰的复杂场景。
综上,置信度是Openbot人体追踪小车的核心参数,合理设置置信度可有效提升追踪精度与抗干扰能力,后续可通过优化模型训练和转向控制,进一步提升小车在复杂场景下的综合性能。
六、参考文献
[1] 姜允侃. 无人驾驶汽车的发展现状及展望[J]. 微型电脑应用, 2019, 35(5):5.
[2] 杨帆. 无人驾驶汽车的发展现状和展望[J]. 上海汽车, 2014(3):6.
[3] 刘炜, 陆荐寰. 自动驾驶汽车环境感知传感器研究[J]. 汽车实用技术, 2023, 48(10):197-203.
[4] 张新钰, 高洪波, 赵建辉, 等. 基于深度学习的自动驾驶技术综述[J]. 清华大学学报(自然科学版), 2018.

实验一

实验二
