微重力环境下植物及微生物生长特点的研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
微重力环境下植物及微生物生长特点的研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
孟诗雅 |
女 |
高一13 |
组长 |
zp03g06n01 |
|
刘馨忆 |
女 |
高一13 |
组员 |
zp03g06n02 |
|
施航帆 |
女 |
高一13 |
组员 |
zp03g06n03 |
|
闫惠茹 |
女 |
高一13 |
组员 |
zp03g06n04 |
|
肖舒心 |
女 |
高一13 |
组员 |
zp03g06n05 |
|
指导教师 |
曹千千 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 对于微重力环境,小组成员打算通过实验了解微重力环境对植物和微生物的影响,对目前国家空间生物学领域有初步了解。 主要内容: 实验一、基于Arduino搭建微重力模拟装置,以便于模拟后续实验中的微重力环境; 实验二、通过探究不同微重力条件下水萝卜的根系特征的差异,了解微重力环境对植物生长的影响; 实验三、通过探究不同微重力条件下刚丝绒泡菌的识别能力的差异,了解微重力环境对微生物生长的影响。 |
||||
研 究 假 设 |
1、微重力环境下,植物根系生长方向不固定,根系长度变小,根系导电率变高。 2、微重力环境下,微生物长势更迅速,但识别功能减弱。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:微重力环境下植物及微生物生长特点的研究 |
编号: |
||
活动时间:9月18日 |
第 3 次 |
活动地点:教室 |
|
指导教师:曹千千 |
班级:高一13班 |
||
参加活动成员: 组内: 孟诗雅、刘馨忆、施航帆、闫惠茹、肖舒心 |
|||
活动内容: 1)目的(解决什么问题): 微重力环境对刚丝绒泡菌生长长势与导航能力的影响 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ①各自在家进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:微重力环境下,菌丝长势更迅速,但菌丝识别能力减弱。 ②解决了大家一直疑惑的问题:观念中,菌丝长势越好,识别能力越强,为什么实验显示识别能力减弱呢。 ③完成了预定目标和计划。新的问题:如何通过调节重力加速度大小培育出长势好且识别能力强的菌丝。 记录者: 刘馨忆 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 微重力环境下植物及微生物生长特点的研究 |
编号: |
||||
课题组成员 |
组长:孟诗雅 |
组员:刘馨忆、施航帆、闫惠茹、肖舒心 |
|||
指导教师:曹千千 |
报告执笔人: 刘馨忆 |
完成时间:9月26日 |
|||
主导课程:空间生物学 |
相关课程:生物学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:通过课题一实验,成功基于Arduino自制回转仪模拟装置。 实验二结果:随重力加速度的减弱,即微重力程度的加深,水萝卜的根的生长方向越不固定,发芽速度越慢,发芽率越低,根系长度越小,植物长势越矮小,根的相对电导率升高。 实验三结果:随重力加速度的减弱,即微重力程度的加深,菌丝长势更加迅速,识别能力减弱。 |
|||||
参考书目及资料:孙丽超,赵鹏卓,胡伟,等,空间微生物研究及生物工程应用[J]. 生物学杂志,2024,41(06):1-11. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4.微重力环境下植物及微生物生长特点的研究
徐州市第一中学高一13班 孟诗雅、刘馨忆、施航帆、闫惠茹、肖舒心
【摘要】对于微重力环境,小组成员打算通过实验了解微重力环境对植物和微生物的影响,对目前国家空间生物学领域有初步了解。实验结果发现微重力环境下水萝卜植株矮小,根系长度减小,根系伤害度提高;刚丝绒泡菌长势更迅速,识别能力减弱。
【关键词】微重力;回转器;水萝卜;刚丝绒泡菌。
一、 研究背景
当今我国航空航天技术快速发展,其独特的微重力环境使生命体进入空间飞行后引起的大部分有害因素可通过不断改进宇航设施来规避,但微重力的影响广泛且难以被排除。
人类进行长期的空间探索必须要有空间生命支持系统做保证,其中植物起关键性作用:吸收CO2、释放O2,循环利用宇航员产生的固体和液体废弃物,提供新鲜食物,甚至可以缓解宇航员的心理状况。而植物是一个高度复杂的多细胞有机体,要在空间微重力条件下正常生长发育,获得最大化的产量,必须了解微重力在植物生长发育各阶段所起的作用。迄今为止,在太空飞船或载人航天器等航天环境中发现的微生物种类已超过200种。
在空间环境下,微生物展现出与地面环境不同的生长性状和行为模式,对航天器运行和航天员的健康造成潜在影响。同时,微生物会参与太空舱内水循环、空气循环、废物处理等生命支持系统的运行环节,造成氧气消耗增加和废气排放量上升,进而对舱内气体环境产生不利影响。因此,微生物在适应航天环境的过程中,其生长性状或行为对航天环境有着不容忽视的影响,是人类太空探索中需要关注的关键因素。
本文采用水萝卜种子和刚丝绒泡菌来探究在微重力下植物及微生物的生长特点。通过在地面上模拟微重力环境探究植物和微生物的生长特点对于人类适应航天生活有重要意义。
二、实验材料
1.面包板、Arduino UNO R3 开发板、UNO R3 方口数据线、10KA 电位器、杜邦线(20cm 公对公)、杜邦线(10cm 公对公)、泡棉胶带、SG90舵机、AB胶、5V电源适配器、木板、木条、电脑、牙签、废弃A4纸
2.微重力装置、培养皿、记号笔、琼脂、酒精消毒片、电子秤、称量纸、药匙、搅拌棒、种子、镊子、泡胶带、黑色卡纸、电导率仪、离心管、量杯、滤纸、烧杯、电煮锅、剪刀、透明胶带、电脑、蒸馏水、微波炉、自来水、湿纸、手机、拍摄参照物、遮盖物、计时器
3.微重力装置、培养皿、记号笔、琼脂、电子秤、称量纸、药匙、搅拌棒、刚丝绒泡菌套装(刚丝绒泡菌、燕麦、滴管、镊子)、泡棉胶带、滤纸、迷宫模型、电煮锅、剪刀、手机、电脑、透明胶带、微波炉、烧杯、自来水、拍摄参照物
三、研究过程
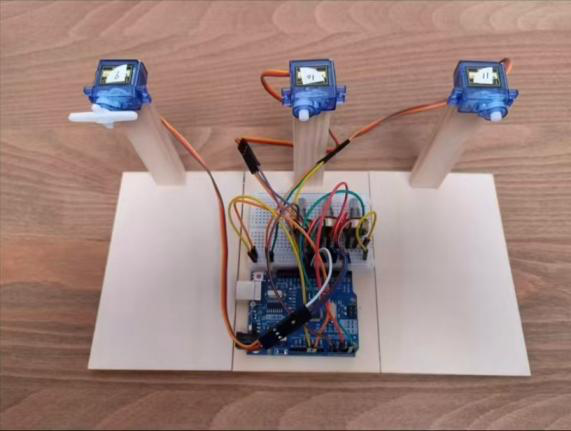
1.基于Arduino搭建微重力模拟装置
1.1电子元器件的连接
1.1.1连接面包板
首先,将Arduino的5V引脚连接到面包板上的电源总线(+),然后将Arduino的GND引脚连接到面包板上的接地总线(-);
1.1.2连接电位器
将电位器与面包板连接,因实验设计需要,总共需完成3个电位器的安装。首先,将3个电位器插入面包板上,确保每个电位器的3个引脚位于面包板不同的3行中,将每个电位器上端外部引脚连接到面包板电源总线(+),中部引脚分别连接到Arduino模拟输入引脚 A0、A2和A4,最后将下端外部引脚连接到面包板接地总线(-),确保每个电位器的位置适宜,不影响旋钮的转动;
1.1.3连接 SG90 舵机
将SG90舵机与面包板连接,因实验设计需要,总共需完成3个舵机的安装。每个SG90舵机有三根线:电源、接地和信号线,电源线通常为红色,分别连接到面包板电源总线(+)。地线为棕色,分别连接到面包板接地总线(-)。信号引脚为白色,分别连接到Arduino 板上的数字引脚 9、10和11。
1.2微重力模拟装置的搭建
1.2.2支架固定
用AB胶将舵机与木条粘连,搭建可以支撑舵机的支架,因实验设计需要,总共需完成3个支架的组装。
1.2.2装置组装
将连接好的Arduino、面包板、舵机支架和木板组装,防止电机运行过程中因误触造成的误差。具体操作:用泡棉胶带将Arduino板、面包板与木板粘黏固定,用 AB胶将木条(已固定舵机)与木板粘黏固定,即完成模拟装置的搭建。
2.回转器模拟不同重力环境对水萝卜生长特性的影响
2.1琼脂基培养基的制备
2.1.1手部及环境消毒
实验前,选择干净整洁的环境,并使用75%的酒精湿巾对环境及桌面进行消毒;
2.1.2琼脂的称量与溶解
使用电子秤、药匙、称量纸精准称量1.5g琼脂,将琼脂倒入盛有100mL 自来水的电煮锅中,开小火煮沸,期间用搅拌棒持续搅拌以防止结块,待溶液澄清后,停止加热;
2.1.3倒平板
待琼脂液冷却至不烫手(约45℃)后,将其转移至烧杯,然后倒入培养皿中,确保琼脂覆盖培养皿底面,倒入高度至皿高的约一半。盖好培养皿盖子,等待琼脂凝固(约10-20min)如有冷凝水,可短暂取下盖子使其蒸发。
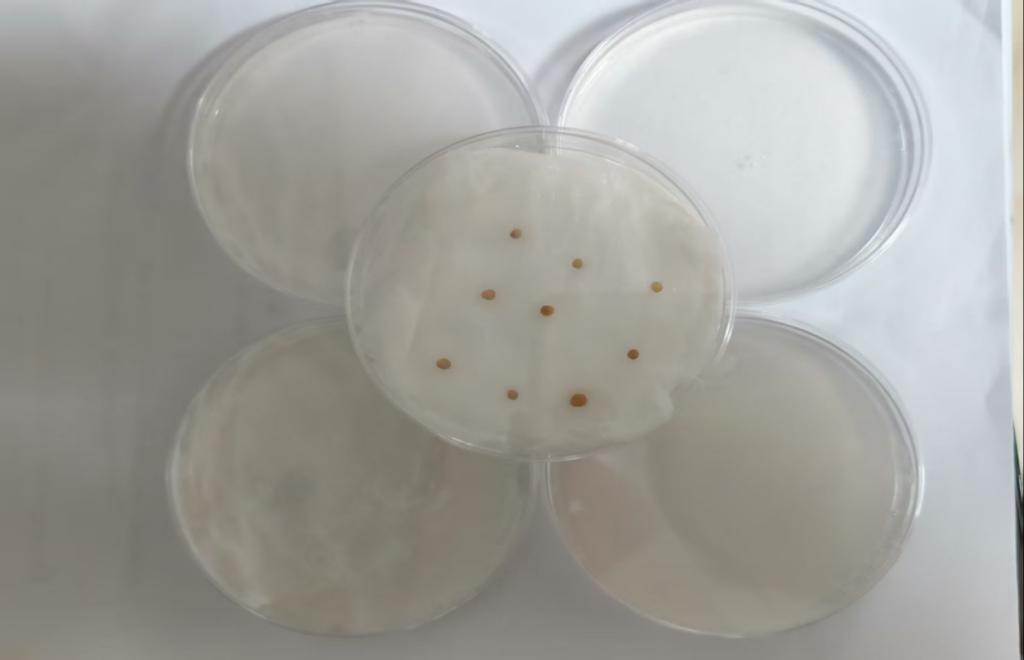
2.2种子接种与处理
2.2.1接种准备
用剪刀将滤纸剪成与培养皿等大的圆形纸片,通过折叠找到纸张中心点,并用记号笔标记,绘制田字形模板;
2.2.2接种
接种前,将种子放在垫有湿纸的培养皿中浸润过夜(促使种子萌发),待种子有明显吸胀变化后,使用镊子将9颗水萝卜种子平躺嵌入琼脂中,每个种子的珠孔应指向下方,确保珠孔裸露在琼脂外,以获得氧气,保证发育出的根不会扎到琼脂中;
2.2.3种子固定
静置10分钟,使种子外层吸收水分并粘附在琼脂上。然后尝试将培养皿垂直放置并标记种子珠孔初始朝向,检查种子是否掉落。如有掉落,则将种子放回原位并延长静置时间;
2.2.4盖子固定
用胶带把培养皿的盖子粘好,注意不要封得太紧,稍微留点缝隙保证种子能呼吸到空气)。
2.3实验设计及装置安装
2.3.1数据调研
通过文献调查,了解并统计地外空间不同重力环境的重力加速度数据;
2.3.2实验设计
①对照组:正常重力环境,无需旋转,直接将对照组培养皿垂直放置。②③④均为实验组,用以模拟不同的重力环境。模拟不同重力组的培养皿用泡棉胶带粘黏在舵机的摇臂上,确保培养皿位于支架中心;
2.2.3转速换算及调节
转速是描述物体做圆周运动快慢的物理量,通常用转每分钟(RPM)表示根据公式①可知,角速度(ω)与轨道半径(r)和重力加速度(g)有关,根据公式②可换算出转速 RPM和重力加速度的关系,根据公式③与调研的重力加速度值,计算模拟该重力环境所需调节的转速RPM大小,旋转电位器调节转速大小,同时用手机秒表功能记录培养皿旋转圈数,以纠正转速大小。
ω=
ω=
RPM=![]()
2.4根系特征的观察与测定
2.4.1观察
每天观察2次,检查种子根系的发育情况并拍照记录,当根系开始发育后,则更频繁地观察(每2-4h一次)。每次拍摄种子时,把种子放置在黑色卡纸上,以黑色背景为底色拍摄,最下方放置已知长度的物品作为拍摄参照物;
2.4.2根系生长方向观察
观察每个培养皿中种子根系的朝向,判断其与种子初始朝向的关系;
2.4.3发芽率测定
每24h记录一次不同处理的种子发芽率;
发芽率=(培养皿内已发芽种子数/培养皿内种子总数)*100%
2.4.4根系特征测定
实验结(5d)拍摄培养内种子照片,使用ImageJ软件进行手动测定。
2.5植物细胞相对电导率测定
2.5.1蒸馏水电导率测定
取10mL蒸馏水,用电导率仪测定蒸馏水电导率平行测定3次,取平均值记为R°;
2.5.2根系细胞电导率测定
利用离体根系测量。首先,用镊子除去根系上残留的琼脂,用剪刀取根系(约0.5g)剪碎放置在离心管内,加10mL蒸馏水于离心管中,保证根系样品充分浸泡。室温放置2h后(室温不高于30°℃),将离心管中浸提液倒入10mL量杯中,用电导仪测定其电导率,每个处理平行测定3次,取平均值记为R。测完后,将浸提液倒回离心管中,离心管置于盛有沸水的300mL烧杯中,烧杯上方放置一物品,尽量减少热量流失,热浴20min后取出,自然冷却至室温,并在室温下平衡3-5min,后倒入洗净的10mL量杯,测定水浴后的电导率,平行测定3次,取平均值记为R:
2.5.3数据计算
根据实验数据分析不同处理的电导率变化,并计算不同处理下的伤害度,计算公式为:
相对导电率(%)=
伤害度(%)=
其中L为处理组别的相对电导率;Lck为对照组别的相对电导率。
3.回转器模拟不同重力环境对刚丝绒泡菌生长特性的影响
3.1绒泡菌前期处理
3.1.1菌核复苏
将滤纸垫在培养皿里,滤纸加自来水润湿,然后将多余的水分倒出。取一片菌核,正面朝上放进培养皿里,轻轻压菌核所在的滤纸,使其彻底润湿。后将培养皿的盖子盖上,放置在避光黒暗处,最佳温度约25℃左右,最低不能低于15℃,最高不能超过30℃。一般在3-15个小时后会出现黄色的脉络状的原质团;
3.1.2绒泡菌喂食
菌核复苏后,培养温度扩大范围为12~30℃,最佳25℃。喂食前,将燕麦置于培养皿内,并在燕麦上用滴管滴加几滴水润湿。约2-3小时后,黏菌完全覆盖旧食物,这时可以继续喂食了。这样反复操作,一天喂食3-5次,很快就能变肥。
3.2琼脂培养基的制备
琼脂培养基的制备同2.1琼脂培养基的制备;
3.3绒泡菌接种
3.3.1培养皿接种
将养肥后的绒泡菌按原质团在滤纸上的扇面面积裁剪均分为4组,分别将裁剪后的绒泡菌滤纸放入已经有琼脂培养基的培养皿中,如滤纸较为干燥,滴一滴清水使其湿润,利于其爬行,并在每个已经有琼脂培养基的培养皿内放入等量的燕麦,引导其爬行;
3.3.2盖子固定
使用透明胶带固定培养皿盖子,避免完全密封,否则绒泡菌滋生杂菌。
3.4实验设计及装置安装
3.4.1实验设计
设①对照常重力环境,无需转,直接将对照组培养皿避光放置在纸盒内(保证黑暗环境)。②③④均为实验组,用以模拟不同的重力环境。模拟不向重力组的培养皿需小心安装在何服电机支架上,确保培养皿位于支架中心;
3.4.2转速换算及调节
参考课题二中“2.2.3实验设计及装置安装一(3)转速换算及调节”进行转速换算及调节设置。
3.5绒泡菌生长特性的观察与测定
3.5.1原质团形态观察
在原质团形成后,每天加入适量的燕麦(同时燕麦上滴加清水使其湿润)。在25℃下进行黑暗培养。,每天拍照并规察其形成原质团后的生长状态,进而完成对其生活史的很意。
3.5.2爬行范围测定
以生长的原质团面积和扇形前缘的爬行范围来表示原质团的长势,用不同等级标记原质团扇形前缘的爬行范围,“+++”表示爬行范围很远;“++”表示爬行范围较远;“+”表示爬行范围几乎没有;
3.5.3原质团面积测定
将拍摄的实验照片上传至电脑,用Image软件测定原质团面积。
3.6绒泡菌识别功能的验证
3.6.1迷宫模型前处理
由于绒泡菌无法在塑料材质上生存,所以需要将迷宫模型灌注琼脂以保证绒泡菌生存。首先将迷宫模型边缘四周的塑料按扣拆卸,具体方法为:用剪刀将上层的塑料膜边缘剪开3-5厘米的开口,捏住剪开的膜片,来回掰动剪开的角,使最近的按扣脱落,首个按扣松脱后,顺势向上掀起塑料膜,陆续使其余的按扣松脱;
3.6.2加热琼脂液
将2g琼脂与100mL自来水按比例混合,使用小电锅将其加热至沸腾,搅拌至琼脂完全溶解,形成透明的溶液;
3.6.3琼脂迷宫的制备
待琼脂液冷却至室温,避免过热使迷宫模型变形。使用滴管吸取冷却的琼脂液,滴入经过前处理的迷宫模型内,使琼脂液铺满迷宫轨道,滴入琼脂液的高度约为轨道高度的 1/2-2/3。后静置冷却至室温,待琼脂完全凝固(约15-30min);
3.6.4放置食物
在凝固的琼脂迷宫终点位置放置燕麦片(滴加清水使其湿润);
3.6.5接种绒泡菌
用镊子将各处理的绒泡菌接种在琼脂迷宫的起点位置,保证各处理的接种量一致,确保其健康且活跃,参考课题二“2.4.4根系特征测定”使用ImageJ测量迷宫起点至终点的最短路径,后盖上上层塑料膜,防止绒泡菌逃离迷宫,并将琼脂迷宫放置在适宜的环境中(黑暗、25℃左右);
3.6.6观察记录
每隔一定时间(由于迷宫路线对绒泡菌而言较为复杂,前三天可放宽观察间隔,如6-8h,当绒泡菌处于最外缘迷宫轨道时,根据实际情况缩小观察间隔,如1-2h)观察绒泡菌的移动路径,记录不同处理组的绒泡菌是否能够找到食物源。同时使用相机/手机拍摄绒泡菌的移动过程照片,以便后续分析其路径,;
3.6.7数据分析
比较绒泡菌实际移动的路径与迷宫中预设的最短路径,讨论不同的重力环境是否影响绒泡菌最短路径的“导航”能力。
四、结果与分析
1. 回转器模拟不同重力环境对水萝卜生长特性的影响
回转器在不同旋转速度下的植物发芽率及根系观察记录表
观测时间 |
实验组编号 |
回转器转速(r/mmin) |
发芽率(%) |
根系生长方向(如有发芽的种子,描述其生长方向) |
36h |
CK |
0 |
86% |
向下 |
MO1 |
30 |
78% |
略向左倾斜 |
|
MO2 |
60 |
75% |
更向左倾斜 |
|
MO3 |
90 |
64% |
完全偏移 |
|
44h |
CK |
0 |
90% |
向下 |
MO1 |
30 |
80% |
略向左倾斜 |
|
MO2 |
60 |
75% |
更向左倾斜 |
|
MO3 |
90 |
70% |
完全偏移 |
回转器不同旋转速度下的植物根系长度数据记录表
生长周期:7d |
测定指标:根系长度(L/cm) |
||||
实验组编号 |
回转器转速(r/min) |
种子编号 |
平均值 |
||
1 |
2 |
3 |
|||
①:CK |
0 |
6.2 |
6.5 |
6.3 |
6.3 |
②:MO1 |
30 |
5.6 |
5.6 |
5.7 |
5.7 |
③:MO2 |
60 |
4.7 |
4.7 |
4.8 |
4.8 |
④:MO3 |
90 |
4.0 |
4.0 |
4.2 |
4.1 |
回转器不同旋转速度下的植物电导率数据记录表
实验组编号 |
回转器转速(r/min) |
R0: |
相对电导率(%) |
|||||||
R1 |
R2 |
|||||||||
1 |
2 |
3 |
均值 |
1 |
2 |
3 |
均值 |
|||
①:CK |
0 |
12.5 |
12.8 |
12.6 |
12.6 |
25.3 |
25.1 |
25.4 |
25.3 |
49.8 |
②:MO1 |
30 |
13.2 |
13.5 |
13.3 |
13.3 |
26.5 |
26.8 |
26.6 |
26.6 |
50.0 |
③:MO2 |
60 |
14.1 |
14.3 |
14.2 |
14.2 |
28.4 |
28.2 |
28.5 |
28.4 |
50.0 |
④:MO3 |
90 |
15.3 |
15.4 |
15.4 |
15.4 |
30.6 |
30.5 |
30.5 |
30.6 |
50.2 |
回转器模拟不同重力环境水萝卜的生长特性分析表
实验组编号 |
回转器转速(r/min) |
根系长度(cm) |
相对导电率(%) |
伤害度(%) |
①:CK |
0 |
6.3 |
49.8 |
12.5 |
②:MO1 |
30 |
5.7 |
50.0 |
15.2 |
③:MO2 |
60 |
4.8 |
50.0 |
18.7 |
④:MO3 |
90 |
4.1 |
50.3 |
22.3 |
通过上述实验,我们观察到:
不论在哪种环境中,植物种子的发芽率随实验天数增加逐渐增大,其中,正常重力环境中,种子的发芽率最大,种子发芽最快。
在不同重力环境下,植物的根系生长方向不同,其中,重力环境下,根系生长方向为竖直向下生长。微重力环境中,根系生长方向为四面八方随机生长。
与正常重力环境相比,其他重力环境中的植物根系长度更小,植物长势更矮小。随着回转器转速的增加,植物所受到的力增大,植物根系长度逐渐减小。
随着回转器转速的增加,植物根系细胞相对导电率和伤害度逐渐增大,推测产生这种现象的原因可能是转速过快导致植物根系细胞受到伤害。
2.回转器模拟不同重力环境对刚丝绒泡菌生长特性的影响
(1) 微重力环境下绒泡菌的生长爬行(一个对照组,三个实验组,变量是舵机转速)
观测时间 |
实验组编号 |
回转器转速(r/min) |
图片 |
爬行范围 |
原质团生长面积(cm²) |
初始 |
CK |
0 |
|
+ |
23 |
G1 |
20 |
|
++ |
31 |
|
G2 |
30 |
|
++ |
37 |
|
G3 |
40 |
|
+++ |
45 |
|
12h |
CK |
0 |
|
+ |
22 |
G1 |
20 |
|
++ |
30 |
|
G2 |
30 |
|
++ |
35 |
|
G3 |
40 |
|
+++ |
42 |
|
24h |
CK |
0 |
|
+ |
27 |
G1 |
20 |
|
++ |
33 |
|
G2 |
30 |
|
++ |
38 |
|
G3 |
40 |
|
+++ |
52 |
|
36h |
CK |
0 |
|
++ |
35 |
G1 |
20 |
|
++ |
44 |
|
G2 |
30 |
|
+++ |
52 |
|
G3 |
40 |
|
+++ |
82 |
|
48h |
CK |
0 |
|
++ |
56 |
G1 |
20 |
|
++ |
72 |
|
G2 |
30 |
|
+++ |
85 |
|
G3 |
40 |
|
+++ |
93 |
|
60h |
CK |
0 |
|
+++ |
61 |
G1 |
20 |
|
+++ |
89 |
|
G2 |
30 |
|
+++ |
90 |
|
G3 |
40 |
|
+++ |
136 |
不同的重力环境下,绒泡菌的长势不同。与正常重力环境相比,微重力环境的绒泡菌长势更好。其中,回转器旋转速度最快的装置中,绒泡菌的爬行范围最远,新生长原质团面积最大,这表明了低重力环境可能更有利于绒泡菌的生长。而通过查资料得到,绒泡菌的生长可受重力抑制,低重力环境可解除或减弱这种抑制作用。在不同重力环境中,随回转器旋转速度增加,绒泡菌长势逐渐变迅速。
(2) 微重力环境下绒泡菌的导航能力(一个静止迷宫做对照组,一个旋转迷宫做实验组)
绒泡菌识别能力验证实验记录表
培养周期:3d |
||||||
实验组标号 |
回转器转速(r/min) |
是否寻到食物 |
用时(h) |
是否为最短路径 |
最短路径(cm) |
实际路径(cm) |
CK |
0 |
是 |
36 |
否 |
43 |
62 |
MO |
40 |
是 |
60 |
否 |
43 |
74 |
不同的重力环境下,绒泡菌在迷宫内均能寻找到食物源,表明重力对绒泡菌的识别能力影响不大。其中,静止迷宫中的绒泡菌用时短,旋转迷宫的绒泡菌用时最长。
绒泡菌的实际爬行路径与迷宫中预设的最短路径不同。其中,在静止迷宫中,绒泡菌在迷宫第2、3层绕了弯路,在第4层(最外层)走了最短路径。而在旋转迷宫中,绒泡菌在每一层都饶了弯路。
对于此实验现象有以下推测:
绒泡菌借助细胞识别气体分子,在前三层,两组中的绒泡菌都无法准确依据气味识别路径长短。而到了第四层,在正常重力时,绒泡菌出现了识别功能的提高,但旋转中的绒泡菌由于气味被扰乱,还是无法准确识别气味。
注:由于实验次数有限,得到的实验现象不一定准确,推论有限。另外,实验中也存在特殊情况,见第三组实验原质团增长曲线图,我组采用忽略少量特殊情况的方法得出结论。
五、结论
1.回转器模拟不同重力环境对水萝卜生长特性的影响
(1)微重力环境影响植物根的生长方向。重力越小,根的生长方向越不固定;
(2)微重力环境下种子发芽速度慢,发芽率较小;
(3)微重力环境中的植物根系长度更小,植物长势更矮小;
(4)伤害度随相对导电率的增大而增大,重力越小,水萝卜相对电导率越高,其细胞所受伤害越大。
2.回转器模拟不同重力环境对刚丝绒泡菌生长特性的影响
(1)微重力环境更有利于绒泡菌的生长;
(2)随回转器旋转速度增加,绒泡菌长势逐渐变迅速;
(3)重力对绒泡菌的识别能力有影响,重力作用越弱,绒泡菌识别功能减弱。
六、参考文献
期刊文章:
[1]孙丽超,赵鹏卓,胡伟,等,空间微生物研究及生物工程应用[J].
生物学杂志,2024,41(06):1-11.
[2]郑慧琼,空间微重力条件下的植物生长发育[J].世界科学,2024,
(10):31-34.
[3]龙勉.如何在地球表面模拟空间微重力环境或效应:从空间细胞生
长对微重力响应谈起[J].科学通报,2014,59(20):2004-2015.
[4]王俊表,范志杰,陈来夫.北京落塔:探索微重力科学前沿[J].科
学新闻,2024,26(05):37-39.
[5] 田大可,范小东,郑夕健,等.空间可展开天线微重力环境模拟研
究现状与展望[J].机械工程学报,2021,57(03):11-25.
[6]朱战霞,张志昊,孙冲,等.月面重力环境效应的地面模拟方法[J].
载人航天,2022,28(01):121-127.
[7]赵光显,王佳平,高建义,等,失重/模拟失重对真菌影响的研究
进展[J].航天医学与医学工程,2018,31(05):571-576.
[8] 邓素芳,杨有泉,陈敏.两种能模拟微重力效应的植物回转装置[J]
农机化研究,2014,36(04):249-252.
[9]贾磊,胡玉龙,施博洋,一种面向空间增材制造的微重力环境地面
模拟试验方法[J].科技创新与应用,2024,14(34):18-21.
学位论文:
[1] 翁宜敬.模拟微重力效应对果蝇发育及相关基因的影响[D].大连海事大
学,2010.
[2]朱相杨.绒泡菌目几种黏菌的培养、代谢产物及其生物活性的研究[D].
吉林农业大学,2017.
[3]张奕婷.微重力环境对螺旋藻生长影响的研究[D].贵州大学,2008.
[4]黄静.模拟微重力下植物细胞生理及细胞电融合研究[D].首都师范大学,
2007.
[5]雷姗姗.刚丝绒泡菌P.rigidum个体发育及其原质团耐酸碱胁迫机制研
究[D].吉林农业大学,2022.
[6]陈曦.模拟微重力效应的单轴回转器转速设定的研究[D].大连海事大学,
2011.
实验一相关图片

实验二相关图片

实验三相关图片