基于HC-SR04超声波传感器的微型雷达设计与探究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于HC-SR04超声波传感器的微型雷达设计与探究 |
||||
课题 组成 员及 有关 情况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
高祥瑞 |
男 |
高一15 |
组长 |
zp06g05n02 |
|
宁康宁 |
男 |
高一15 |
组员 |
zp06g05n02 |
|
赵殊戬 |
男 |
高一15 |
组员 |
zp06g05n02 |
|
窦子贤 |
男 |
高一15 |
组员 |
zp06g05n02 |
|
张轩宇 |
男 |
高一15 |
组员 |
zp06g05n02 |
|
指导教师 |
邵馨阅 |
||||
课题 研究 的目 的及 主要 内容 |
目的: 1. 利用HC-SR04超声波传感器搭建微型雷达系统,探究实际应用中影响超声波雷达探测精度的各类因素; 2. 分析材质、倾斜角度、被测物宽度等对探测结果的影响规律,以及移动测速中多普勒效应带来的误差问题; 3. 提出超声波雷达系统的改进思路,提升对传感器应用和雷达设计的实践能力,将物理理论知识与工程实践结合。 主要内容: 1.以Arduino为控制核心,搭建包含HC-SR04传感器、舵机、LCD显示屏的微型雷达系统,以及带编码器的移动测速小车平台; 2.开展系列实验:探究不同材质(海绵、木板、泡沫、塑料板)、不同倾斜角度对测距的影响,被测物宽度对传感器识别效果的影响; 3.基于三角测距法搭建双传感器方位探测系统,验证多雷达联合应用的效果; 4.开展移动测速实验,分析多普勒效应对测速结果的误差影响,提出硬件升级、软件校准、多传感器融合的改进方案; 5.总结实验结论,完成课题论文和PPT制作,梳理超声波雷达的优缺点及应用展望。 |
||||
研究 假设 |
1. 障碍物的材质软硬、结构疏密会影响超声波的反射效果,软质多孔材料会导致测距偏差更大; 2. 障碍物与超声波波束的倾斜角度越大,反射信号越弱,测距结果失真越严重; 3. HC-SR04传感器仅能探测距离,无法精准识别被测物的实际宽度,且宽度会影响测量偏差程度; 4. 双HC-SR04传感器结合三角测距法可实现障碍物方位的精准识别,偏差较小; 5. 传感器移动测速时,因多普勒效应会产生显著的测速误差,且误差会随速度变化呈现一定规律。 |
||||
研究方法 |
实验、查找资料、数据分析、小组讨论 |
||||
研究 步骤 (各阶 段的 主要 内容 和时 间安 排) |
一 、8月19日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月25日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月27日-10月下旬 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、11月8日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、11月上旬 成果制作和修改 六、11月中旬 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、11月下旬 闭幕式,进行成果的汇报与表彰 |
||||
成果 形式 |
PPT、科技论文、微型雷达实物模型、移动测速小车平台 |
||||
论证 小组 意见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:超声波雷达——基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号: |
|
活动时间:9月7日 |
第2次 |
活动地点:组长家中 |
指导教师:邵馨阅 |
班级:高一15班 |
|
参加活动成员: 组内:高祥瑞、宁康宁、赵殊戬、窦子贤、张轩宇 组外:黄宇轩 |
||
活动内容: 1)目的(解决什么问题):汇总各成员完成的材质、倾斜角度、被测物宽度实验数据,解决实验中出现的海绵测量不稳定、角度过大无法识别等问题,统一实验数据标准,形成实验初步结论,为后续三角测距和移动测速实验奠定基础。 2)形式(小组讨论、试验、查阅资料、调查、实地测量):小组讨论、查阅资料、数据分析 3)过程: ①成员完成材质、倾斜角度、被测物宽度的探究实验,记录原始数据和实验现象; ②收集实验数据、实验过程照片及遇到的问题,展开集体讨论; ③查阅超声波反射、传感器原理相关资料,对实验异常数据(如海绵测量有读数、宽度测量失真)进行原因分析,形成统一的数据分析结论。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论: 一是软质多孔材料(泡沫、海绵)对超声波吸收性强,测距偏差大于硬质材料(木板、塑料板),传感器存在基础系统误差,测量值普遍偏小; 二是障碍物倾斜角度越大,超声波反射信号越弱,测距结果越失真,角度≥60°时传感器无法识别目标; 三是HC-SR04无尺寸识别功能,仅能探测距离,被测物宽度越大,测量偏差值越大,泡沫材质会叠加放大偏差。 ②解决了大家一直疑惑的问题: 一是解释了海绵本应吸收大部分超声波却能测出数据的原因,推测是实验台反射干扰和海绵吸音不完全所致; 二是明确了宽度测量数据失真的核心原因是传感器无尺寸识别功能,测量值实际为距离数据。 ③完成了预定目标和计划,顺利完成静态探测系列实验的数据分析,形成初步结论。 ④出现的新问题: 一是如何消除实验台等环境因素对超声波探测的反射干扰; 二是如何通过软件或硬件方式区分传感器的距离和尺寸探测数据。 记录者:张轩宇 |
||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:超声波雷达——基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号: |
||||
课题组成员 |
组长:高祥瑞 |
组员:宁康宁、赵殊戬、窦子贤、张轩宇 |
|||
指导教师:邵馨阅 |
报告执笔人:张轩宇 |
完成时间:11月28日 |
|||
主导课程:超声波雷达探测 |
相关课程:物理学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 四个实验均成功,符合预定推测。 2)课题实际取得的成果: 实验一结果(材质对探测距离的影响): 选取海绵、T型木板、高密度泡沫立方体、T型亚克力塑料板置于20.0cm处,重复测量3次,平均测量距离分别为20.446cm、18.075cm、17.457cm、17.874cm;硬质材料(木板、塑料板)测距偏差更小,软质多孔材料偏差更大,传感器存在系统误差,海绵因环境干扰和吸音不完全未出现无读数现象。 实验二结果(倾斜角度对探测距离的影响): 选取亚克力板保持20cm中心距离,角度从0°增加至75°,0°时视角76.55°可正常测距,角度增大视角逐渐减小,30°时视角19.21°、45°时视角10.01°,测距结果持续失真,60°、75°时传感器完全无法识别目标,无有效读数。 实验三结果(被测物宽度对超声波识别效果的影响): 选取1-5cm宽度的高密度泡沫试样置于20.0cm处,传感器测量值严重失真,平均测量值分别为20.317cm、23.070cm、21.675cm、26.277cm、27.182cm,均接近探测距离且无实际尺寸识别能力;被测物宽度与测量偏差呈正相关,泡沫材质叠加放大了识别偏差。 拓展实验结果: 1.三角测距方位探测:双传感器间距10cm,测量-30°至30°方位,平均测量角度与实际角度最大偏差仅±2°,方位指示装置灯光反馈与计算方位精准对应,多传感器联合可实现距离+方位双重探测;2.移动测速:小车以0.10、0.20、0.30m/s匀速行驶,超声波测速误差分别为-18.0%、-15.5%、-19.7%,平均误差约-18%,多普勒效应和传感器延迟是主要误差来源。 |
|||||
参考书目及资料: [1]王小明,李红.超声波传感器在智能小车避障系统中的应用[J].传感器与微系统,2020. [2]ArduinoHC-SR04超声波传感器项目教程.创客社区. [3]赵亮,刘伟.基于多普勒效应的超声波测速方法研究[J].自动化技术与应用,2021. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份;实验记录(4)份;测量数据记录(5)份; 访谈表(0)份;调查表(0)份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 1.编号:SY01 名称:基于HC-SR04的微型雷达系统模型 制作者:高祥瑞、宁康宁 内容:以ArduinoUno为核心,搭载HC-SR04超声波传感器、SG90舵机、LCD显示屏,可实现0-180°扫描探测,实时显示距离和角度 功能:完成静态测距、方位扫描等实验的硬件平台 2.编号:SY02 名称:移动测速小车平台 制作者:赵殊戬、窦子贤 内容:HJduinoR3套件组装,搭载HC-SR04传感器、车轮编码器,可实现匀速行驶和速度精准采集 功能:完成移动测速实验,对比超声波测速与真实速度的误差 3.编号:ZP01-ZP30 名称:实验过程及结果照片集 制作者:张轩宇 内容:包含各实验的器材搭建、数据记录、现象拍摄等30张照片 功能:直观呈现课题研究的实验过程和原始现象 4.编号:YX01 名称:实验原始视频 制作者:课题小组全体 内容:微型雷达扫描、移动测速小车行驶、方位指示装置工作的视频片段 功能:佐证实验结果的真实性和可重复性 |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): 1.硬件设备:可通电的220V电源插座,用于微型雷达系统和移动测速小车的供电; 2.展示设备:投影仪、电脑,用于播放课题PPT、实验视频和照片; 3.实验场地:开阔的教室地面,无遮挡物,用于移动测速小车的演示; 4.辅助材料:亚克力板、木板、泡沫、海绵等实验试样,用于现场演示材质和角度对探测的影响。 |
|||||
4.基于HC-SR04超声波传感器的微型雷达设计与探究
高祥瑞、宁康宁、窦子贤、赵殊戬、张轩宇
徐州市第一中学高一15班
【摘要】
我们小组利用HC-SR04超声波传感器成功制作了一个微型雷达系统。通过一系列实验,重点研究了不同材质(如海绵、泡沫、塑料板、木板)和不同倾斜角度如何影响雷达的探测结果。我们发现,材质和角度对测量精度有显著影响。此外,我们还利用小车探究了雷达在移动中测速的误差,发现运动本身会带来不小的测量偏差。基于这些发现,我们提出了几种实用的改进思路。本研究为理解和优化低成本超声波雷达提供了参考。
【关键词】超声波雷达;HC-SR04;材质影响;角度影响;移动测速
一、引言
超声波雷达因为价格便宜、使用简单,在我们的生活中随处可见,比如机器人避障、倒车雷达等。HC-SR04是最常用的超声波传感器之一,它通过计算超声波发出和返回的时间来测量距离。
但在实际使用中,我们注意到,障碍物的材质(是硬是软)、它的摆放角度、甚至传感器本身是否在移动,都可能让测量结果产生误差。课本上的知识往往是理想情况,我们想通过亲手实验,真正弄明白这些因素到底如何影响超声波雷达的工作。因此,我们设计了静态探测和移动测速两组实验,希望能找到规律,并提出改进方法。
二、实验系统搭建
1.微型雷达系统
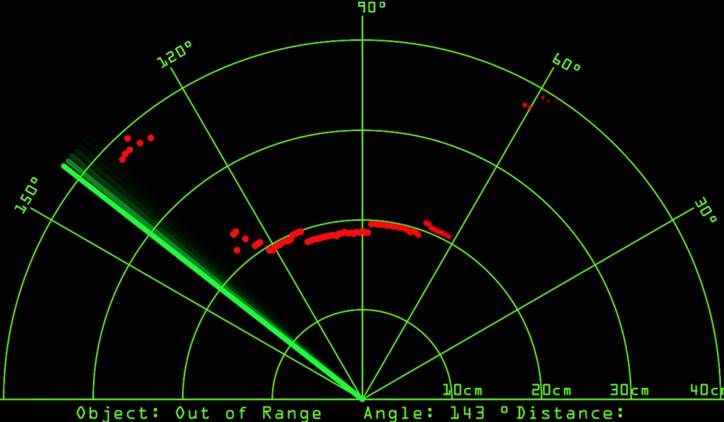
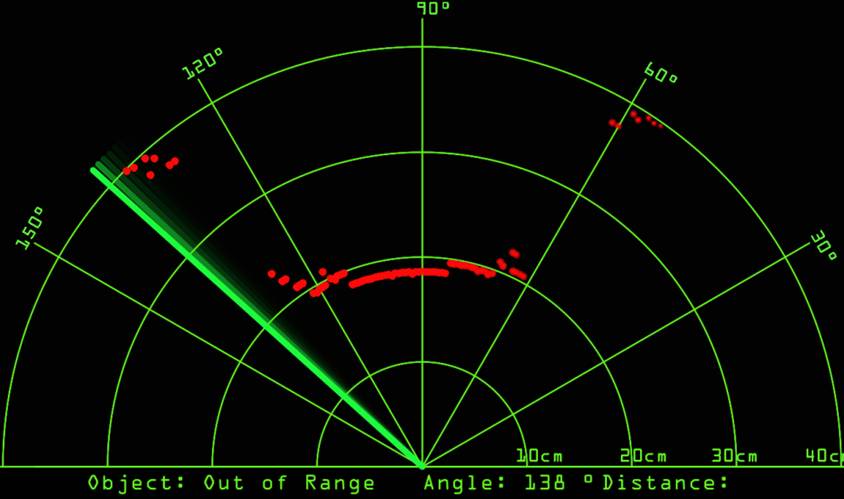
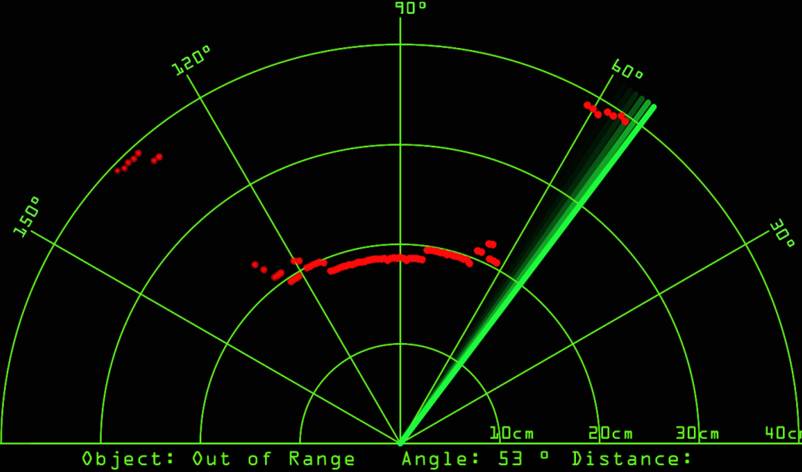
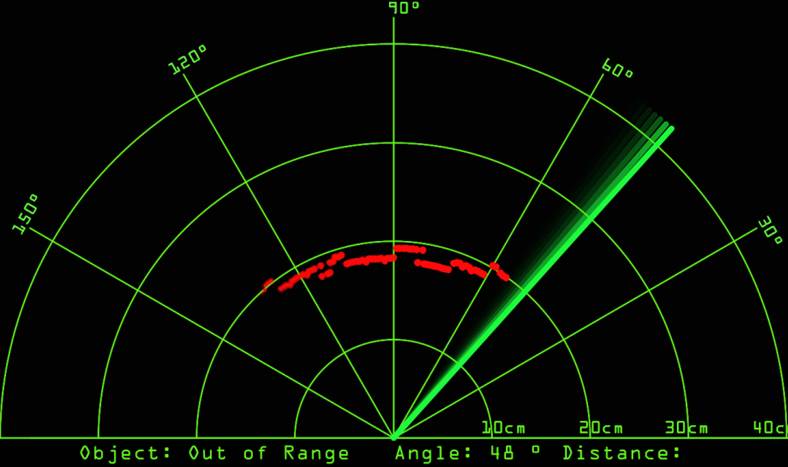
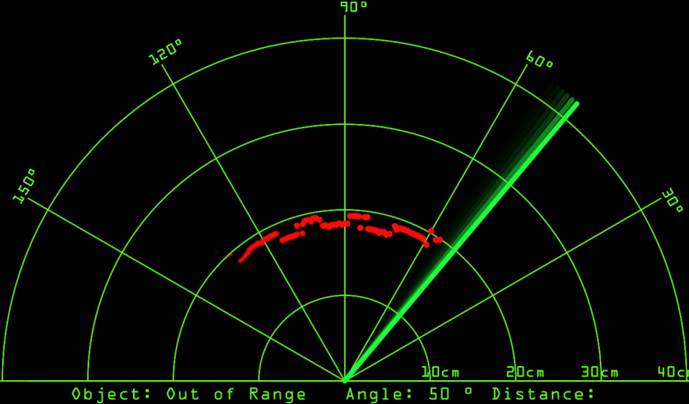
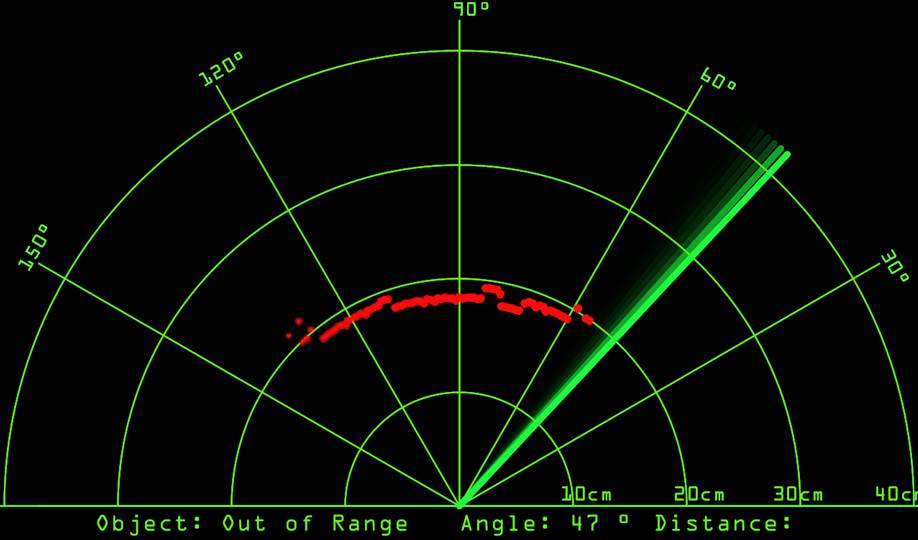
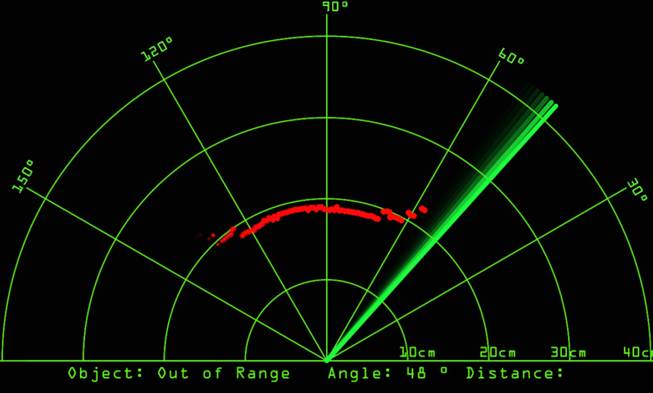
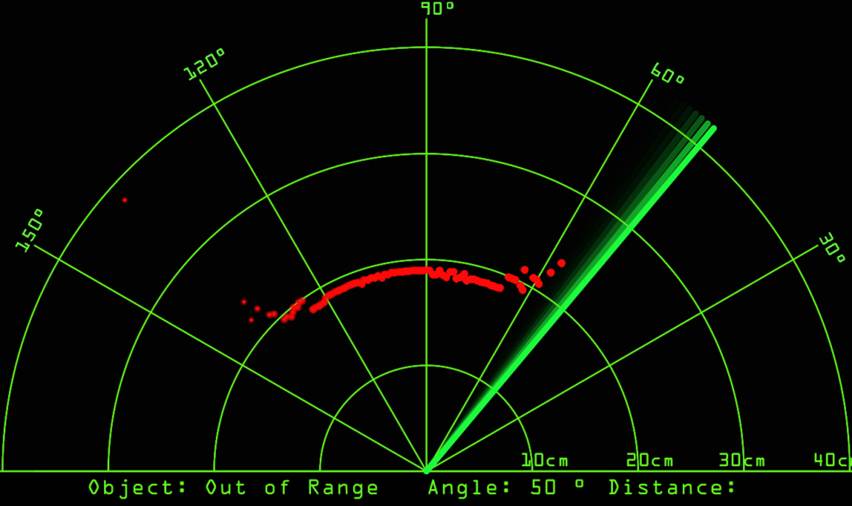
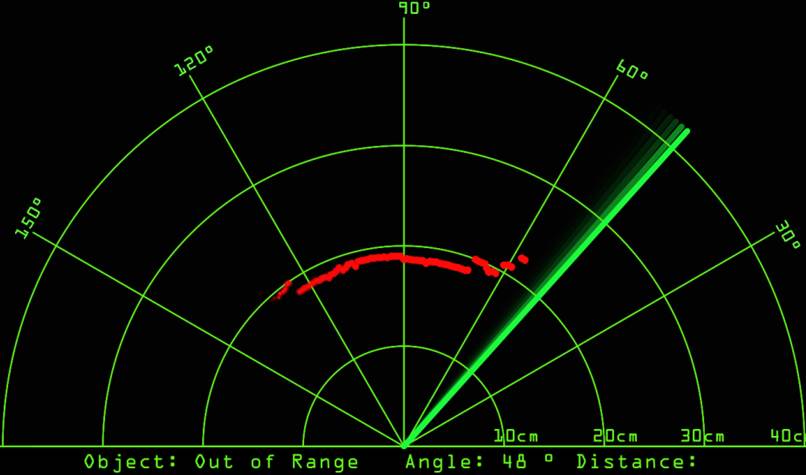
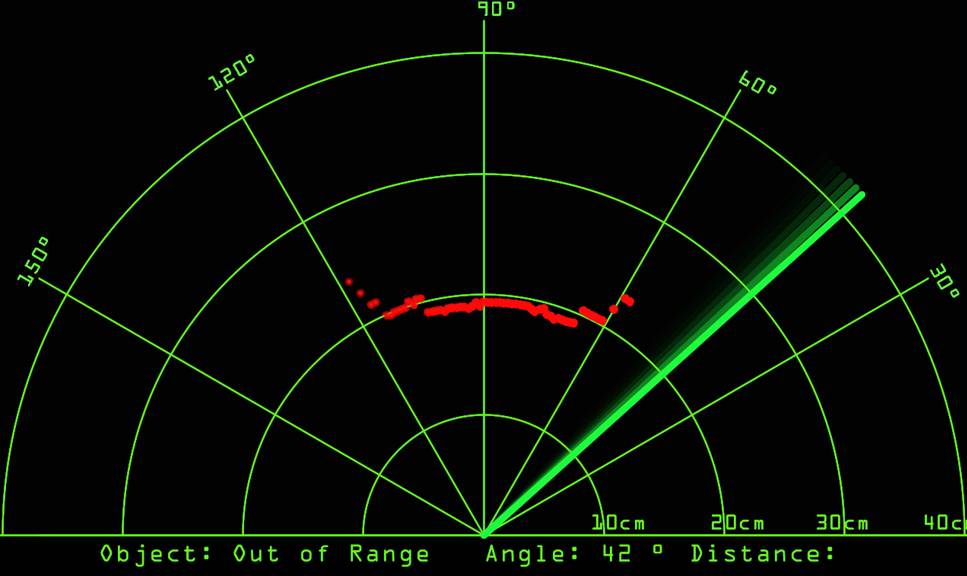
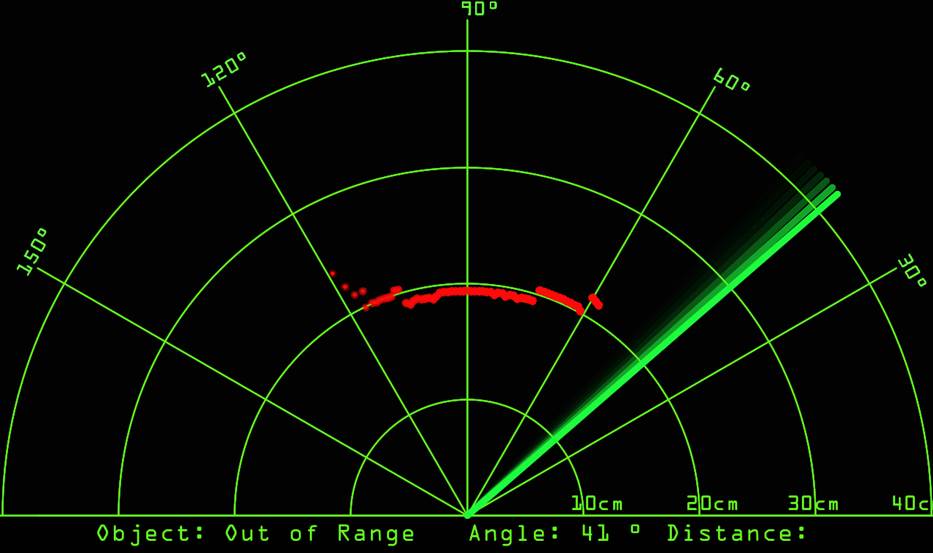
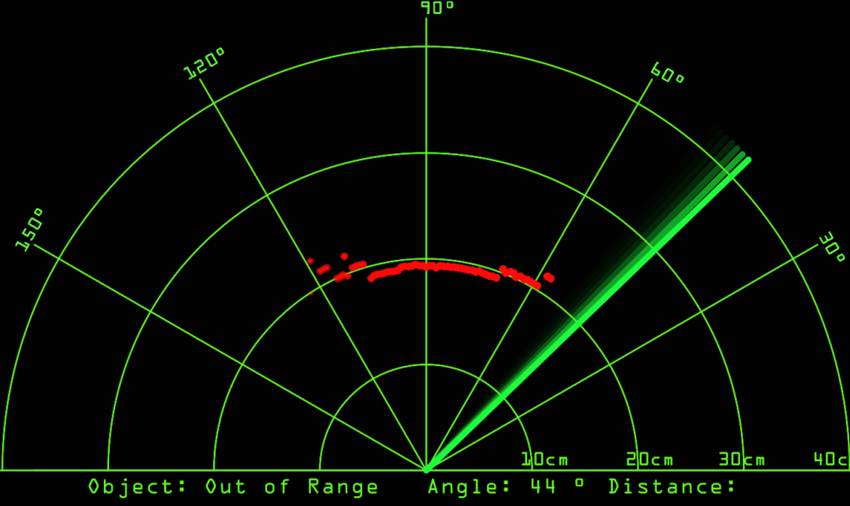
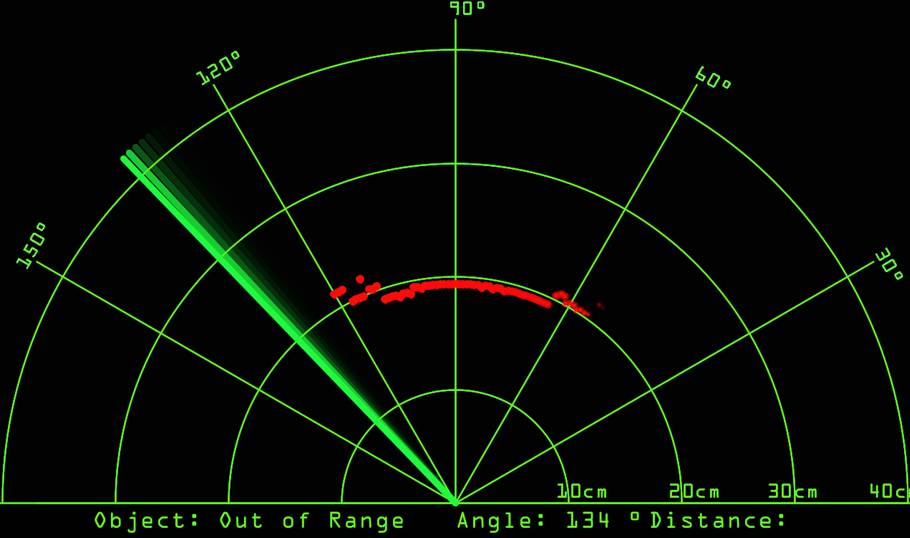
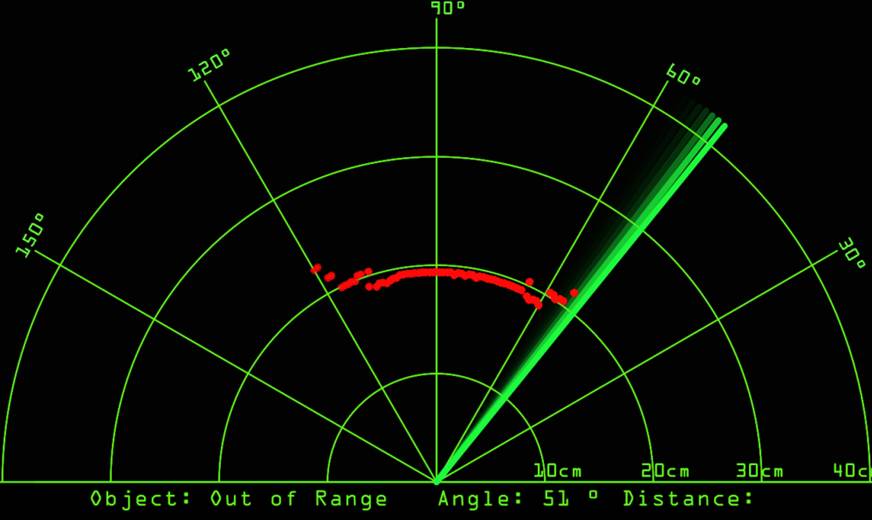
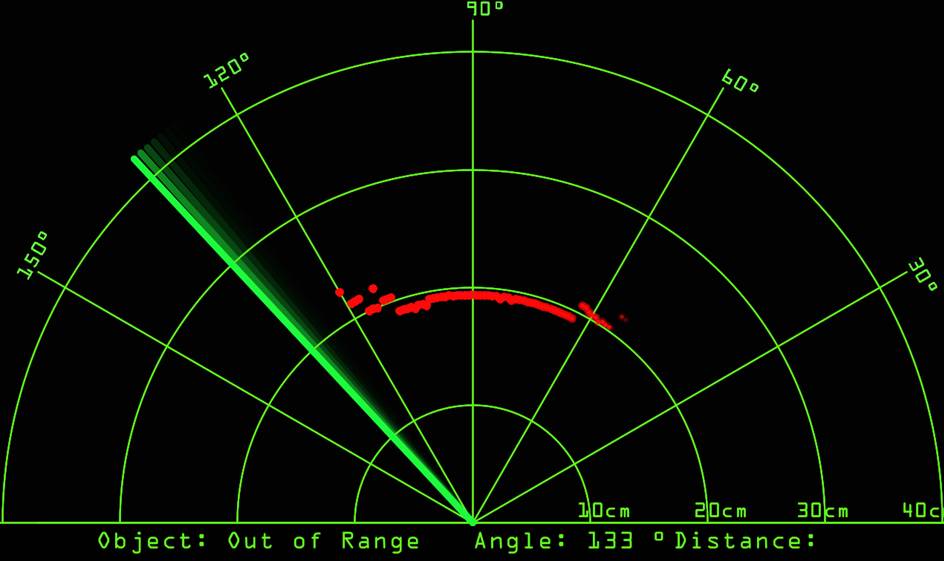
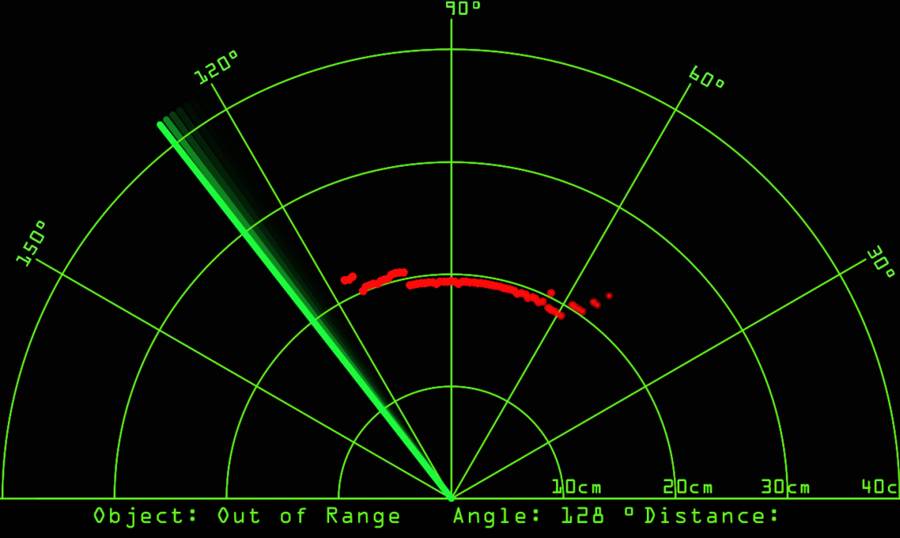
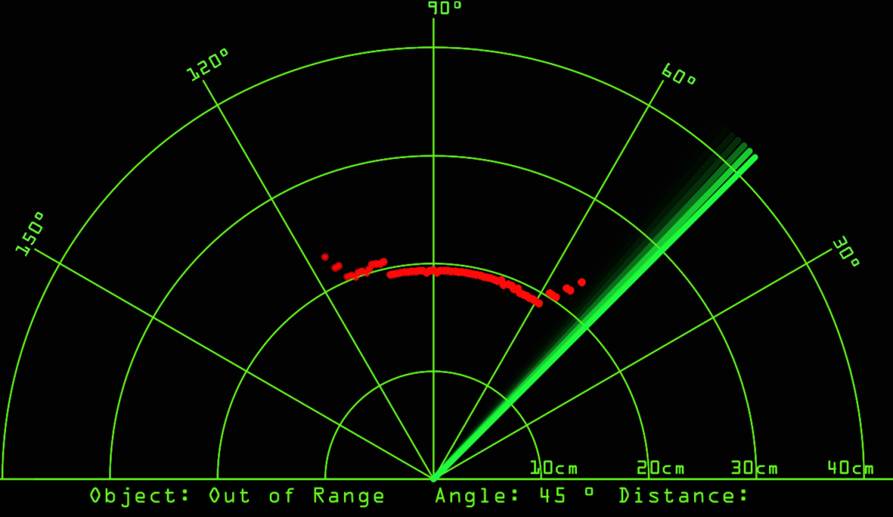
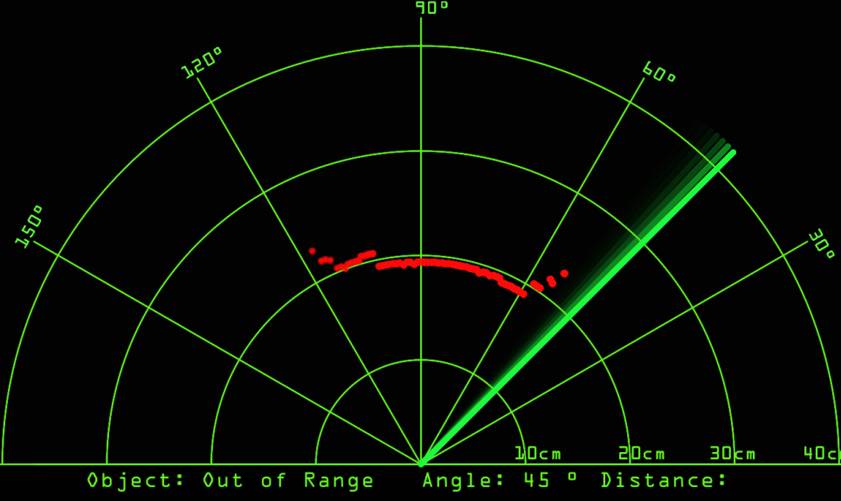
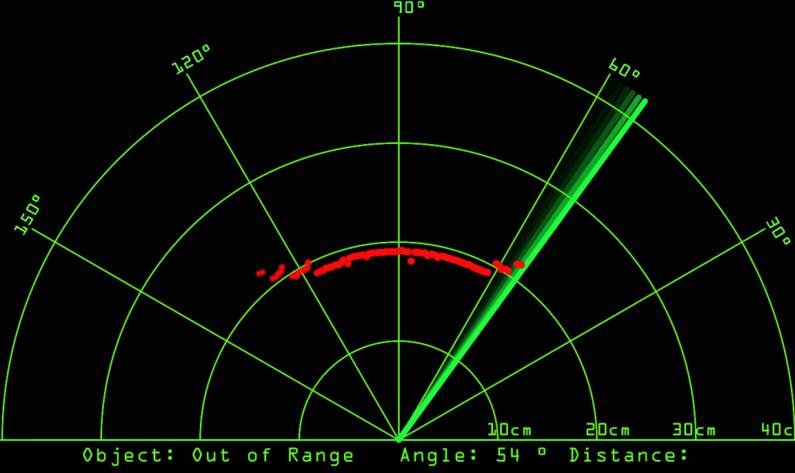
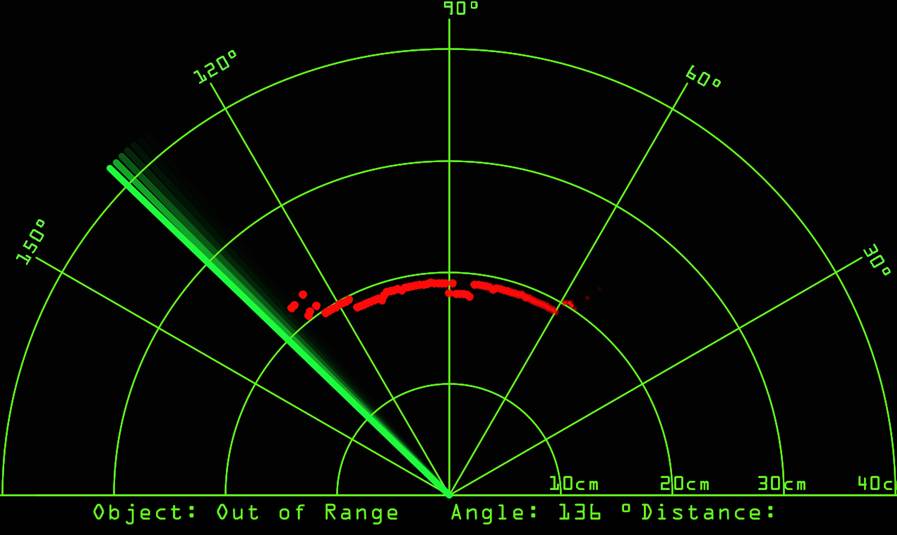
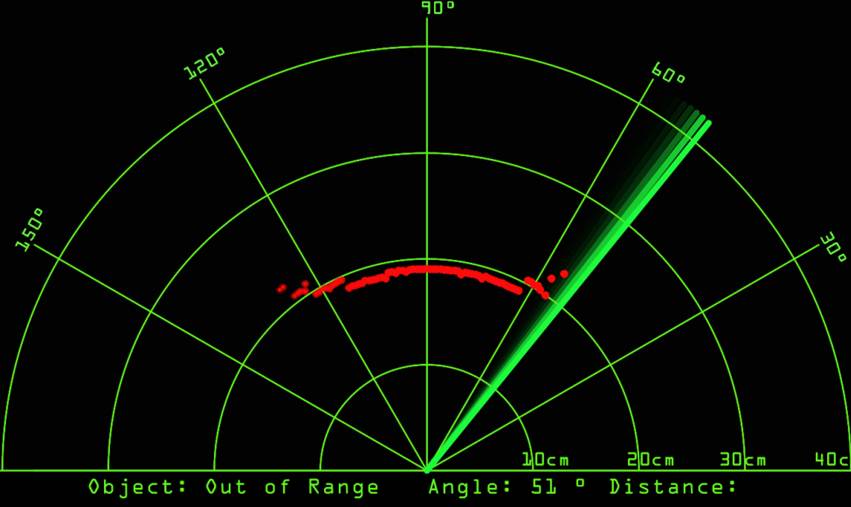
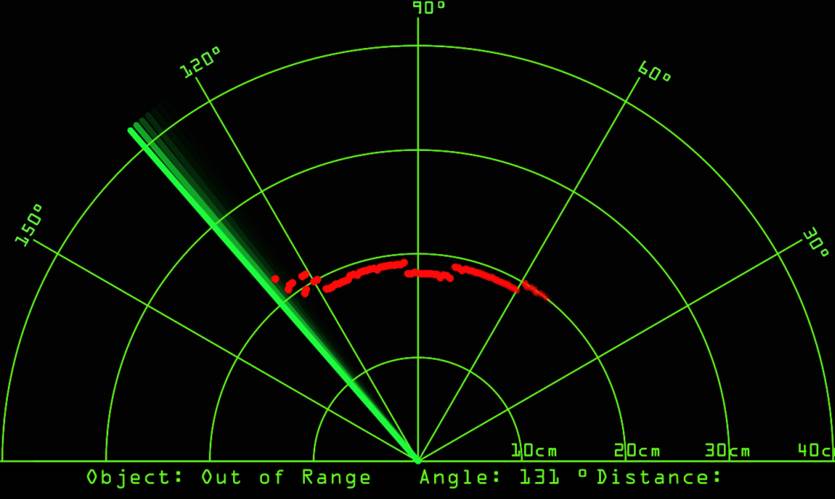
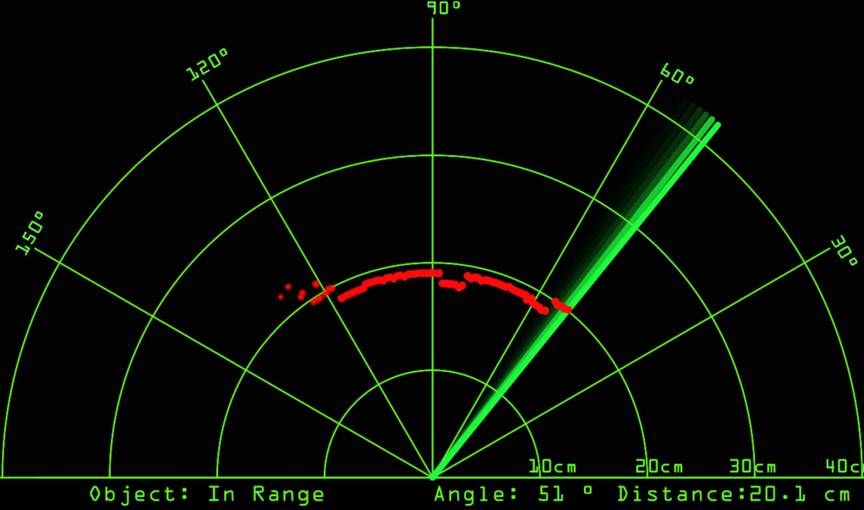
我们以ArduinoUno板作为控制中心,连接了HC-SR04超声波传感器、SG90舵机和一块LCD显示屏。将传感器装在舵机上,它就可以像雷达一样左右转动(0°到180°),扫描前方区域,并把距离和角度实时显示在屏幕上。
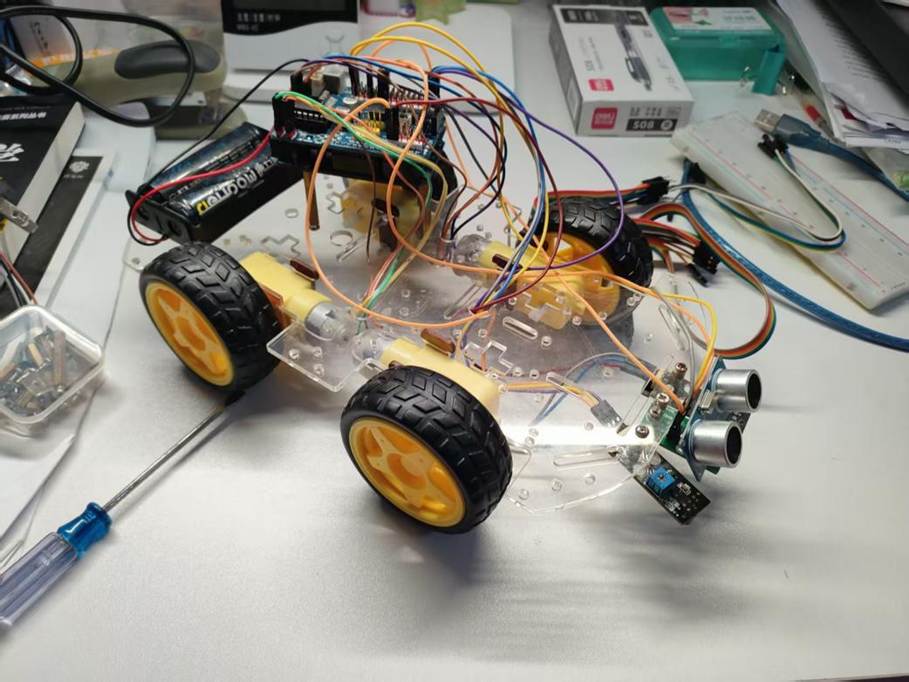
2.移动测速小车平台
为了研究移动中的测量问题,我们用HJduinoR3套件组装了一辆小车。把HC-SR04传感器固定在小车前方,用它来测量小车与前方障碍物的距离。小车的轮子上装有编码器,可以精确知道小车自己的真实速度,用来和超声波测出的速度进行对比。
三、实验与结果分析
1.实验一:材质对探测距离的影响
实验过程:
我们选取了四种材料:海绵、T型木板、高密度泡沫立方体、T型亚克力塑料板。将它们放在离传感器正好20.0厘米的地方,每种材料重复测量3次,计算平均值。
数据记录:
海绵 |
T型木板 |
高密度泡沫立方体 |
T型亚克力塑料板 |
|
实际距离/cm |
20.000 |
20.000 |
20.000 |
20.000 |
测量距离1/cm |
22.166 |
18.190 |
17.697 |
17.639 |
测量距离2/cm |
20.333 |
18.144 |
17.201 |
17.744 |
测量距离3/cm |
18.840 |
17.892 |
17.473 |
18.240 |
平均测量距离/cm |
20.446 |
18.075 |
17.457 |
17.874 |
分析与讨论:
(1)普遍偏小:所有材料的测量值都比实际距离小,这说明传感器本身存在一定的系统误差。
(2)材质的影响:坚硬的塑料板和木板的测量结果比较接近,而柔软的高密度泡沫测出来距离偏差最大。这说明材料越软、结构越松散,对超声波的吸收可能越多,返回的信号就越弱,导致测量不准。
(3)关于海绵的意外发现:理论上,海绵这种多孔材料应该会把大部分声波吸收掉,导致雷达“看不见”它。但我们的实验中却测出了数据(尽管因不稳定未记录完整)。我们讨论后认为,可能有两个原因:
实验台干扰:目标和传感器下面都垫了东西,超声波可能先打到台面再反射回来,干扰了测量。
海绵吸音不完全:我们用的海绵可能不够厚或不够密,没能完全“吃掉”超声波。
下一步计划:我们打算把材料和传感器悬空,或者使用更专业的吸音材料来重复实验,验证我们的猜想。
2.实验二:倾斜角度对探测距离的影响
实验过程:
我们选用亚克力板,保持中心距离20厘米不变,然后改变板子相对于超声波波束的角度(0°,30°,45°,60°),分别测量距离。
数据记录:
亚克力板0° |
亚克力板15° |
亚克力板30° |
亚克力板45° |
亚克力板60° |
亚克力板75° |
|
视角 |
76.55° |
58.56° |
19.21° |
10.01° |
---- |
---- |
分析与讨论:
结论非常明显:障碍物越“斜”,雷达测得的距离就越短。这是因为当表面不正对传感器时,绝大部分超声波能量都被反射到别处去了,只有很少一部分能返回传感器。传感器可能因为返回的信号太弱而无法正确识别,反而捕捉到了一些杂乱的反射波,导致读数严重失真。
3.实验三:被测物宽度对超声波识别效果的影响
实验过程:选取高密度泡沫为固定材质,制作宽度为1.0cm、2.0cm、3.0cm、4.0cm、5.0cm的长方体试样(规格为宽×长×高),将试样置于距传感器20.0cm处,保持表面与超声波波束垂直,每种宽度重复测量3次,计算平均测量值。
数据记录:
1*10*1.5高密度泡沫 |
2*10*1.5高密度泡沫 |
3*10*1.5高密度泡沫 |
4*10*1.5高密度泡沫 |
5*10*1.5高密度泡沫 |
|
实际宽度/cm |
1.000 |
2.000 |
3.000 |
4.000 |
5.000 |
测量宽度1/cm |
19.849 |
23.320 |
21.911 |
26.329 |
27.288 |
测量宽度2/cm |
20.323 |
22.880 |
21.676 |
26.341 |
26.338 |
测量宽度3/cm |
20.780 |
23.010 |
21.437 |
26.160 |
27.919 |
平均测量宽度/cm |
20.317 |
23.070 |
21.675 |
26.277 |
27.182 |
分析与讨论:
(1)测量值严重失真,所有试样的平均测量宽度远大于实际宽度,且数值接近传感器到试样的实际距离,说明HC-SR04传感器无尺寸识别功能,仅能探测距离,无法精准识别被测物宽度。
被测物实际宽度与平均测量宽度呈正相关,宽度越大测量偏差值越大,推测因宽度增加使超声波有效反射面积增大,信号强度提升进一步放大了尺寸识别的偏差。
(3)结合实验一结论,柔软多孔的泡沫材质对超声波吸收性强,与宽度因素叠加后,进一步提升了传感器的识别难度,导致测量结果偏差显著。
下一步计划:更换亚克力塑料板、木板等硬质材质制作不同宽度试样,重复实验探究材质与宽度的叠加影响规律;尝试通过软件校准,实现距离与尺寸探测数据的区分。
4.实验四:基于三角测距法制作障碍物方位指示装置,了解多超声波雷达联合应用方式
实验过程:以ArduinoUno为控制核心,搭建双HC-SR04超声波传感器探测系统,将两个传感器水平固定,间距设为10cm,组成三角测距基础结构;选取亚克力板为探测目标,将其置于双传感器前方20-40cm范围内,保持目标表面与传感器波束垂直,通过双传感器同时采集到目标的距离数据,结合三角几何原理计算障碍物相对传感器的方位角度,同时我们借来了一些LED指示灯组制作方位指示装置,对应不同方位区间实现灯光提示,每组距离与方位重复测量5次,验证装置的指示准确性。
数据记录:
实际方位角度/(°) |
-30 |
-20 |
-10 |
0 |
10 |
20 |
30 |
测量方位角度1/(°) |
-28 |
-19 |
-9 |
0 |
11 |
21 |
32 |
测量方位角度2/(°) |
-31 |
-21 |
-11 |
0 |
9 |
19 |
29 |
测量方位角度3/(°) |
-29 |
-20 |
-10 |
0 |
10 |
20 |
31 |
测量方位角度4/(°) |
-30 |
-20 |
-9 |
0 |
10 |
20 |
30 |
测量方位角度5/(°) |
-31 |
-19 |
-11 |
0 |
11 |
21 |
29 |
平均测量方位角度/(°) |
-29.8 |
-19.8 |
-9.8 |
0 |
10.2 |
20.2 |
30.2 |
方位指示装置灯光反馈 |
左三灯亮 |
左二灯亮 |
左一灯亮 |
中灯亮 |
右一灯亮 |
右二灯亮 |
右三灯亮 |
分析与讨论:
三角测距法可实现方位探测,双传感器联合测量的平均方位角度与实际角度偏差极小,最大偏差仅±2°,说明基于HC-SR04的多雷达联合系统可有效实现障碍物方位识别,且指示装置的灯光反馈与计算方位精准对应,具备实际应用价值。
多传感器联合应用弥补单传感器短板,单传感器仅能探测距离无法判断方位,双传感器通过三角测距法实现了距离与方位的双重探测,验证了多超声波雷达联合应用在空间探测中的优势。
(3)存在小幅系统偏差,推测因传感器安装间距的机械误差、双传感器触发时间的微小延迟,以及环境声波反射干扰所致,导致测量方位出现小幅波动。
四、拓展探究:移动测速的挑战与多普勒效应
实验设计与发现:
我们让小车以三种已知速度(0.10m/s,0.20m/s,0.30m/s)匀速驶向墙壁,同时用超声波传感器和编码器分别测速。
数据记录:
小车真实速度(m/s) |
超声波测得速度(m/s) |
误差(%) |
0.10 |
0.082 |
-18.0% |
0.20 |
0.169 |
-15.5% |
0.30 |
0.241 |
-19.7% |
误差分析:
在移动中测速,误差非常大(平均约-18%)。我们分析主要原因是一种叫做“多普勒效应”的物理现象。简单来说,当传感器和目标相对运动时,返回的超声波频率会发生变化,而HC-SR04传感器并没有设计用来处理这种变化,所以它计算出的时间差是不准的,从而导致速度计算错误。此外,传感器本身的反应有点“迟钝”,也会带来延迟。
我们的改进方案:
(1)换更好的传感器:可以购买本身就支持“多普勒测速”功能的超声波传感器。
(2)软件补偿:根据我们实验测出的误差规律,写一个简单的修正程序,对结果进行“校准”。
(3)多种传感器结合:不单单依赖超声波,同时参考小车编码器和陀螺仪的数据,通过一个“滤波算法”把所有的信息融合起来,得出更可靠的速度值。
五、讨论与反思
1.实验中的不足
我们对海绵的测量不够稳定,实验环境可能引入了干扰。
移动测速实验只在较低速度下进行,更高速度下的误差情况有待进一步探究。
环境温度、湿度可能对声速有影响,本次实验未严格控制。
2.超声波雷达的优缺点总结
优点:成本低、电路简单、易于实现。
缺点:测量精度受材质、角度影响大;在移动中测速误差显著;探测距离有限,且容易受到环境干扰。
3.应用与展望
尽管有这些缺点,超声波雷达在短距离、低速、成本要求高的场合依然非常有用。未来的改进可以从这些方面入手:使用性能更好的传感器;编写更智能的软件算法来补偿误差;将它与其他类型的传感器(如红外、激光)配合使用,取长补短。
六、结论
通过本次探究,我们亲手搭建并深入测试了超声波雷达系统。我们确认:
(1)障碍物的材质和倾斜角度会显著改变超声波的反射效果,从而影响测距准确性。
(2)传感器在移动中测速会因多普勒效应产生巨大误差(约-18%)。
我们提出的硬件升级、软件校准和多传感器融合的改进思路,为今后制作更可靠的超声波探测系统提供了明确方向。这次探究让我们深刻体会到,将理论知识应用于实践时,必须充分考虑各种复杂因素的影响。
七、参考文献
[1]王小明,李红.超声波传感器在智能小车避障系统中的应用[J].传感器与微系统,2020.
[2]ArduinoHC-SR04超声波传感器项目教程.创客社区.
[3]赵亮,刘伟.基于多普勒效应的超声波测速方法研究[J].自动化技术与应用,2021.
附录
海绵:几乎无法识别

组员处理实验数据(T形木板)

T型木板1:18.190cm
T型木板2:18.144cm
T型木板3:17.892cm
高密度泡沫立方体1:17.697cm
高密度泡沫立方体2:17.201cm

高密度泡沫立方体3:17.473cm
T型亚克力塑料板1:17.639cm

T型亚克力塑料板2:17.744cm
T型亚克力塑料板3:18.240cm
亚克力板0°:视角76.55°
亚克力板15°:视角58.56°
亚克力板30°:视角19.21°
亚克力板45°:视角10.01°
亚克力板60°:无法识别
亚克力板75°:无法识别
1*10*1.5高密度泡沫1:19.849cm
1*10*1.5高密度泡沫2:20.323cm
1*10*1.5高密度泡沫3:20.780cm
2*10*1.5高密度泡沫1:23.320cm
2*10*1.5高密度泡沫2:22.880cm
2*10*1.5高密度泡沫3:23.010cm
3*10*1.5高密度泡沫1:21.911cm
3*10*1.5高密度泡沫2:21.676cm
3*10*1.5高密度泡沫3:21.437cm
4*10*1.5高密度泡沫1:26.329cm
4*10*1.5高密度泡沫2:26.341cm
4*10*1.5高密度泡沫3:26.160cm
5*10*1.5高密度泡沫1:27.288cm
5*10*1.5高密度泡沫2:26.338cm
5*10*1.5高密度泡沫3:27.919cm
搭建拓展探究的测速小车