基于Arduino开发板的自动驾驶技术的研究性学习报告
基于Arduino开发板的自动驾驶技术的研究性学习报告
学生姓名:相羽菲,顾武紫琳,王珺瑶,罗悦琪,李乐妍
指导教师:华丽娜
【摘要】本研究基于Arduino开发板与反射式光电传感器TCRT5000,设计并实现了一套自动驾驶小车的循迹系统。通过搭建硬件平台、制作测试跑道并编写控制程序,重点探究了该双传感器系统在直线与弯道场景下的循迹性能。实验结果表明,该系统能够完成基本的循迹任务,但在直线行驶中存在明显的“之字形”摆动现象,稳定性有待提升(平均摆动次数12.5次/直线段,脱轨次数3次/直线段);而在大弧度弯道中表现出较好的任务可靠性。本研究为理解简易自动驾驶系统的控制原理与性能局限性提供了实践依据,并提出了可行的优化方向。
【关键词】Arduino;自动驾驶;反射式光电传感器;循迹控制;性能分析
一、研究背景
人工智能技术的飞跃推动自动驾驶技术进入高速发展期。回溯历史,在人工智能时代之前,无人驾驶技术曾经历无明确方向、无线电控制、基于计算机技术等探索阶段。直至20世纪90年代,依托人工神经网络(ANN)等关键技术,无人驾驶进入了全新的快速发展轨道。本研究旨在将先进的自动驾驶概念转化为可触可感的实践项目,通过基于Arduino开发板和反射式光电传感器的智能小车模型,降低技术门槛,深化对环境感知、决策控制等核心环节的理解,并培养综合的科学探究与工程实践能力。
二、实验材料
1. 核心控制器:Arduino (UNO R3)开发板。
2. 感知模块:反射式光电传感器。
3. 动力与执行机构:智能小车套装(含直流电机、车轮、亚克力底板等)、L298N电机驱动板。
4. 电源模块:充电电池、电池盒、9V电池及电池扣。
5. 连接与辅助材料:各类杜邦线(公对公、公对母)、迷你面包板、220Ω与10kΩ电阻、压舌板、A0白纸、黑胶带(宽1.8cm)。
6. 工具与耗材:热熔胶枪、螺丝刀、剪刀、铅笔、秒表等。
三、研究方案及实践过程
本研究遵循“硬件搭建-环境构建-软件开发-测试验证”的流程展开
1. 小车制作:根据设计图纸,完成小车底盘的机械装配,包括电机固定、车轮安装以及整体结构加固。
2. 跑道制作:在A0白纸上以小车宽度为参考(约22cm),用铅笔设计跑道轮廓,并使用黑胶带粘贴出黑色轨迹线。
3. 反射式传感器模块制作:识别反射式光电传感器针脚并正确接线,利用压舌板制作可调节的传感器支架,将其固定于小车前端,确保两个传感器离地高度一致。
4. Arduino程序设计:编写基于阈值判断的控制算法,实时读取两个传感器的状态(遇到白线输出低电平,遇到黑线输出高电平),并根据状态组合决策小车的运动方向(直行、左转、右转)。
四、结果与分析
为定量评估自动驾驶小车的循迹性能,本研究进行了传感器标定以及直线与弯道循迹测试。
1. 传感器标定
首先对左右两个反射式光电传感器进行了标定,以确定其区分黑白颜色的可靠阈值。测量数据表明,传感器性能一致性好,为简化控制,将动作判断阈值统一设定为500(ADC值),具体数据如表1所示。

表1:反射式光电传感器标定数据
2. 直线赛道循迹性能分析
在直线赛道上进行了四组重复测试,重点关注通过时间、脱轨次数和“之字形”摆动次数。测试结果(表2)显示,小车在直线行驶中稳定性较差。
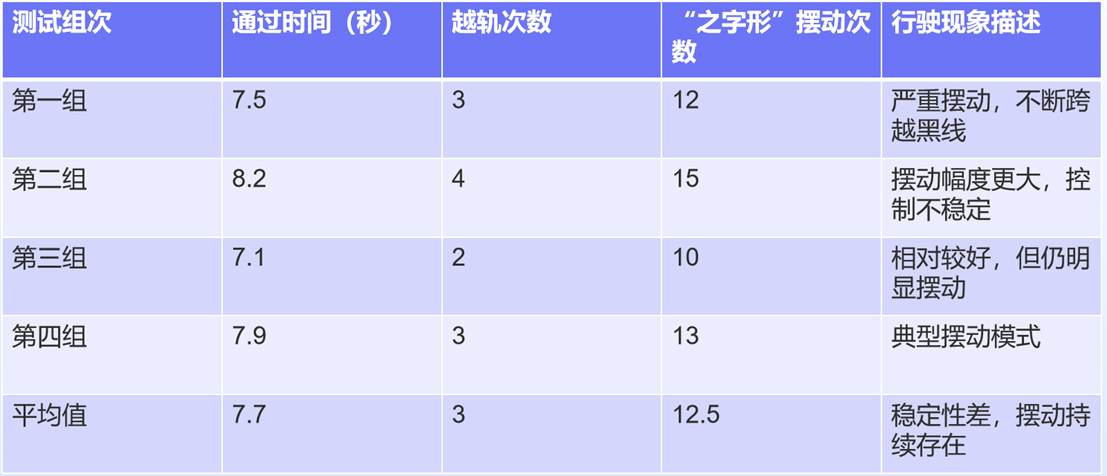
表2:直线赛道循迹性能测试数据
深度分析:“之字形”摆动是双传感器开关控制方案的固有缺陷。小车在直线上无法感知微小偏移,只有当车体偏移到一侧传感器完全压到黑线时,才触发全功率转向修正。这种过激的修正导致小车冲过中线,进而触发另一侧传感器,引发反向全功率转向,形成持续、低效的摆动。四组实验数据的一致性(通过时间极差1.1秒,脱轨次数2-4次)证明了该问题的系统性而非偶然性。
3. 大弧度弯道循迹性能分析
在大弧度弯道上的测试结果(表3)表明,系统在完成弯道任务方面具有较高的可靠性。
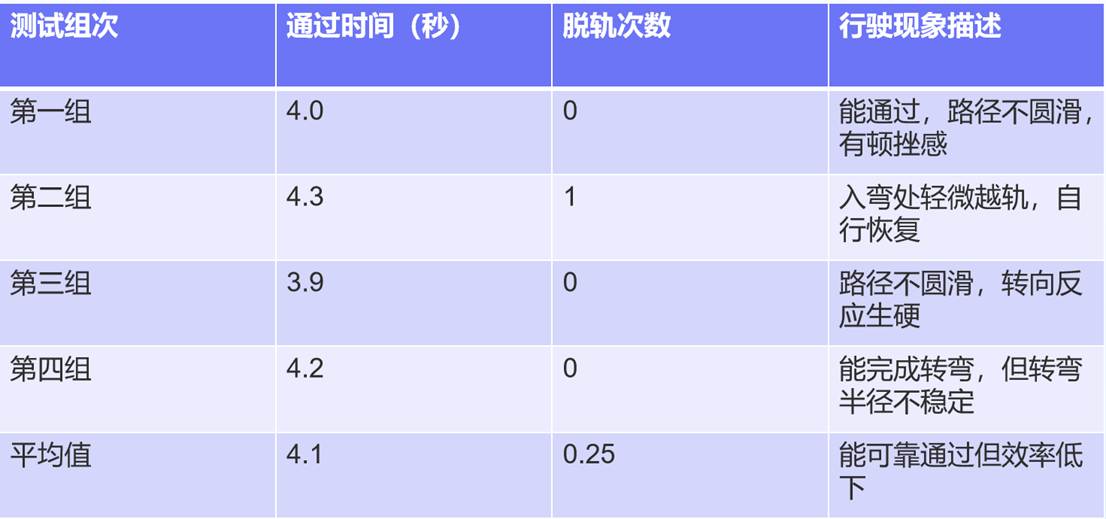
表3:大弧度弯道循迹性能测试数据
深度分析:在弯道中,由于黑线轨迹连续变化,传感器能够持续检测到信号,使小车得以沿着轨迹完成转弯。然而,简单的开关控制导致转向动作生硬,转弯路径不圆滑,通过效率较低。尽管如此,极低的平均脱轨次数(0.25次)证明了系统对于此类简单弯道具有基本任务完成能力。
五、结论
本研究成功构建了一套基于Arduino和双反射式光电传感器的自动驾驶小车循迹系统。实验验证了该方案的基本可行性,同时揭示了其核心局限性:在直线循迹中,由于控制算法的简单性,系统存在固有的不稳定性,表现为持续的“之字形”摆动;大弧度弯道中,系统表现出可靠但效率不高的通过能力;仅适用于简单赛道,缺乏复杂路径适应能力。
优化建议:
算法优化:引入简单的延时判断逻辑或计数器,可有效滤除因路面污点造成的传感器误触发,提高稳定性。未来可探索PID(比例-积分-微分)控制算法,实现更平滑、精准的转向控制。
机械优化:适当加宽两个传感器之间的间距,可以使小车更早地预判弯道变化,从而提前开始转向,改善弯道通过性能。
六、参考文献
[1] 童诗白, 华成英. 模拟电子技术基础(第五版)[M]. 北京: 高等教育出版社.
[2] 程晨. Arduino程序设计基础(第三版)[M]. 北京: 北京航空航天大学出版社.
[3] 王伟, 张旭, 李岩. 基于红外传感器的智能车循迹系统设计与PID控制[J]. 自动化技术与应用.
[4] 卓晴, 黄开胜, 邵贝贝. 学做智能车:挑战“飞思卡尔”杯[M]. 北京: 北京航空航天大学出版社.
[5] 中华人民共和国教育部. 中小学综合实践活动课程指导纲要[Z].
附录
小车制作拼装


跑道制作


反射式光电传感器模块制作
Arduino程序设计
