基于Arduino开发板的自动驾驶技术研究

|
Research on autonomous driving technology based on
Arduino development board
学 校: 徐州市第一中学
班 级: 15班
组 长: 刘雅文
组 员: 李思衡 闫婧予 李瑞蹊 李依诺
指导教师: 孙尧 李嘉珞
徐州市第一中学
二零二六年二月
1.课题背景
1.1中科院微型实验室"科探方舟"
"科探方舟"(课题研究项目),是徐州一中与中科院合作,中科院京区科协牵头设计的品牌科学产品。"科探方舟"以探究性科学实验装置为支柱,在专业探究课程专家的指导下完成"小课题研究",帮助同学们涵养科学精神、提高科学素养。
"科探方舟"是一个探究性的教学集成包,相当于一个微型的实验室,其中包含了生命科学、资源环境等七个不同方向的课题,分别涉及植物水势、超声波雷达、水质浊度检测、C919大飞机、鱼菜共生、自动驾驶、软体机械手,都是基于当下、基于生活和生产实践、基于同学们所见所闻所思所想,是真问题,课题具有前瞻性和鲜明的目的性和计划性。
主要目的在于培养学生的创新思维、合作精神、沟通能力,以此提高科学素养。高中是培养学生创新思维的黄金时期,而小课题研究又是一项缜密的科学实验活动,应该让同学们从高中开始,就养成像科学家一样思维的习惯。通过自主学习、动手实验、成果汇报和答辩的形式,达到开阔视野、启迪灵感、增强创新意识和动手实践能力,提高综合科学素养,为将来成为未来社会急需的创新型人才打下基础。
1.2课题简介
智能小车作为机器人研究的典型平台,集环境感知、决策与控制于一体,是验证算法与硬件方案的理想载体。实现自主移动、避障与目标跟随成为其核心功能需求。距离传感器是实现环境感知的关键部件,反射式光电传感器、超声波传感器与红外传感器因其成本低、技术成熟而被广泛使用。然而,这些传感器在探测原理上存在差异,导致其在不同光照、目标材质等条件下性能表现不一。本研究旨在设计一款集自动行驶、避障与跟随功能于一体的智能小车,通过递进实验验证其性能,并为传感器选型提供参考。
2. 实验过程
2.1实验伊始
2.11设计吉祥物
这是我们组的吉祥物。
2.12开箱:我们收获满满,有学长的一封信,有实验指导手册,有实验用的各种材料。这个箱子不仅满足了我们探究的兴趣和好奇心,也督促我们发现问题,时刻保持思考,以不断质疑的态度和坚持探索的精神去发现更多未知的可能。同时引起了我们对自己的研究对实际应用有什么帮助的反思,以及对于为这个领域贡献一份属于自己力量的热情。
2.2实验过程
我们的研究分为四个阶段:
2.21第一阶段:实现基于反射式光电传感器的自动循线小车,能够在划定跑道上稳定行驶。
2.22第二阶段:在自动行驶的基础上,集成并对比了超声波与红外距离传感器的防撞性能。
2.23第三阶段:在前两阶段基础上,利用OpenBot软件,实现小车对行人的智能跟随功能。
2.24第四阶段:做成太阳能发电板驱动的自动驾驶的洒水车。
2.3结果分析
反射式光电传感器的自动驾驶小车信号强度与单圈完成时间关系为信号强度越低,小车越能精准沿黑线行驶,平均速度更高,单圈时间更短。通过多次程序迭代,小车的转向控制更加平滑,行驶稳定性显著提升。综合各数据,我们得到,当红外线被黑线吸收时,反射信号较弱,模块输出高电平,在白色背景上反射较强时输出低电平,电信号强度与反射光强成正相关,因此电信号强度为225时反射较强,即此时传感器检测到的是白色背景,小车会误判为偏离轨道频繁触发转向修正,导致路径抖动和速度降低,单圈时间延长。电信号强度为50反射较弱,对应黑线检测状态,传感器输出稳定高电平,小车能精准沿黑线直行,减少不必要的转向调整,从而保持更高平均速度,单圈时间更短。
超声波传感器不受环境光影响,但近距离盲区较大,且易受多路径反射干扰,红外传感器依赖红外光反射检测距离,易受环境光干扰,但其响应速度快,适合高频动态检测。红外传感器依赖红外光反射检测距离,易受环境光干扰,在黑暗环境中需人工补光,远距离探测能力弱于超声波,但其响应速度快,适合高频动态检测。
在置信度为0.3到0.45时单人追踪效果最佳,在置信度为0.5到0.55时对第二人干扰的追踪效果最好,在置信度为0.65时对于第三人干扰的追踪效果最优。综合数据,我们得到confidence数值设置越高,小车对目标识别的要求越严格,可减少误触发,如静物和他人干扰,反之则降低灵敏度门槛,但增加了误判风险。在高confidence值下,小车仅对高置信度目标如清晰的人体轮廓反映,适合复杂环境,但会导致反映延迟和漏检在低confidence值下,小车对微弱信号如部分遮挡的人影更敏感,适合简单环境,但易受他人与静物干扰。
3.课题报告
基于Arduino开发板的自动驾驶技术研究
刘雅文
【摘要】本研究设计并实现了一款具备自动行驶、防撞避障与智能跟随功能的综合性智能小车。采用递进式实验方法,分三个阶段展开:首先,基于反射式光电传感器实现小车在划定跑道上的自动行驶;其次,集成超声波与红外距离传感器,对比分析二者在不同光照环境下的防撞性能,实验表明超声波传感器在多数场景下具有更优的稳定性和适应性;最后,结合Openbot软件实现小车对行人的稳定追踪。本研究为低成本、多功能的智能移动平台开发提供了可行的技术方案,并为不同应用场景下距离传感器的选型提供了实验依据。
【关键词】智能小车;反射式光电传感器;超声波传感器;红外传感器;目标追踪
一、 研究背景
随着人工智能与机器人技术的快速发展,智能移动机器人在物流、巡检、家居及服务娱乐等领域的应用日益广泛。智能小车作为机器人研究的典型平台,集环境感知、决策与控制于一体,是验证算法与硬件方案的理想载体。实现自主移动、避障与目标跟随成为其核心功能需求。距离传感器是实现环境感知的关键部件,反射式光电传感器、超声波传感器与红外传感器因其成本低、技术成熟而被广泛使用。然而,这些传感器在探测原理上存在差异,导致其在不同光照、目标材质等条件下性能表现不一。因此,系统评估其适用性对低成本智能平台的开发具有重要意义。本研究旨在设计一款集自动行驶、避障与跟随功能于一体的智能小车,通过递进实验验证其性能,并为传感器选型提供参考。
二、实验材料
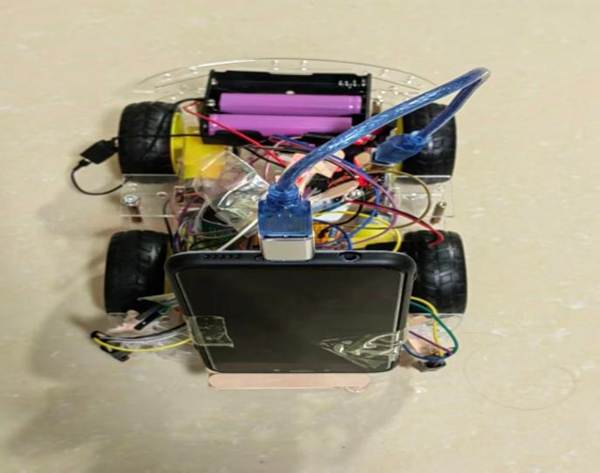
1. 硬件:Arduino UNO R3开发板、L298N电机驱动板、反射式光电传感器、超声波距离传感器、红外距离传感器、直流电机、车轮、亚克力底板、电池(9V及充电电池)、杜邦线、面包板、压舌板、热熔胶等。
2.软件:Arduino IDE、Openbot(手机端)。
3.辅助工具:A0白纸、黑胶带、尺子、秒表、障碍物等。
三、研究过程
1. 第一阶段:自动行驶小车设计
1.1小车组装:依据设计图纸连接电机、驱动板与Arduino主板。
1.2跑道制作:在白纸上用黑胶带粘贴出跑道轮廓。
1.3传感器安装:制作H形支架固定反射式光电传感器。
1.4程序设计:通过电压信号判断跑道边界(<500为白色跑道,>500为黑色边界),实现循迹功能。
1.5调试与记录:测试小车完成单圈时间,优化程序以提高稳定性与速度。
2. 第二阶段:距离传感器性能对比
2.1传感器安装:同时安装超声波与红外传感器。
2.2数据校正:在15cm处校准传感器,记录超声波读数并修改程序阈值。
2.3避障测试:在七种不同光照环境下进行碰撞试验,记录是否停止及停止距离。
3. 第三阶段:行人跟随功能实现
3.1硬件调整:移除其他传感器,安装手机支架。
3.2软件配置:使用Openbot程序,设置置信度(confidence)与通信参数。
3.3跟随测试:在不同置信度下测试单人行走、转向及多人干扰情况下的跟踪效果。
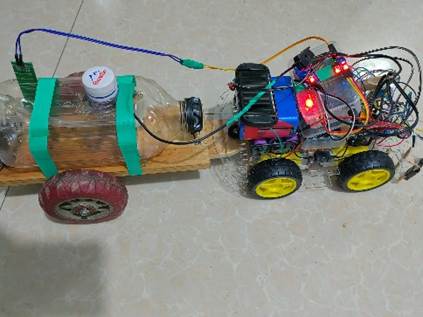
4.第四阶段:做成太阳能发电板驱动的自动驾驶的洒水车。
4.1硬件调整:制作洒水车
4.2程序设计:超声波传感器检测到行人停止洒水,液位传感器检测到有水后水泵工作洒水。
4.3调试洒水车功能。
四、结果与分析
1.自动行驶阶段
1.1图1图像整体呈下降趋势,说明信号强度越低,小车越能精准沿黑线行驶平均速度更高,单圈时间更短。
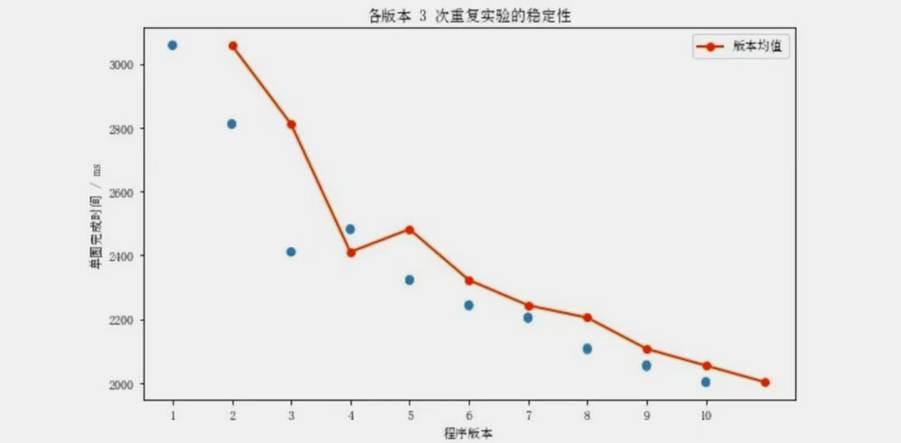
图1:反射式光电传感器的自动驾驶小车不同程序版本与单圈完成时间的关系
1.2图2可以看出,通过多次程序迭代,小车的转向控制更加平滑,行驶稳定性显著提升。
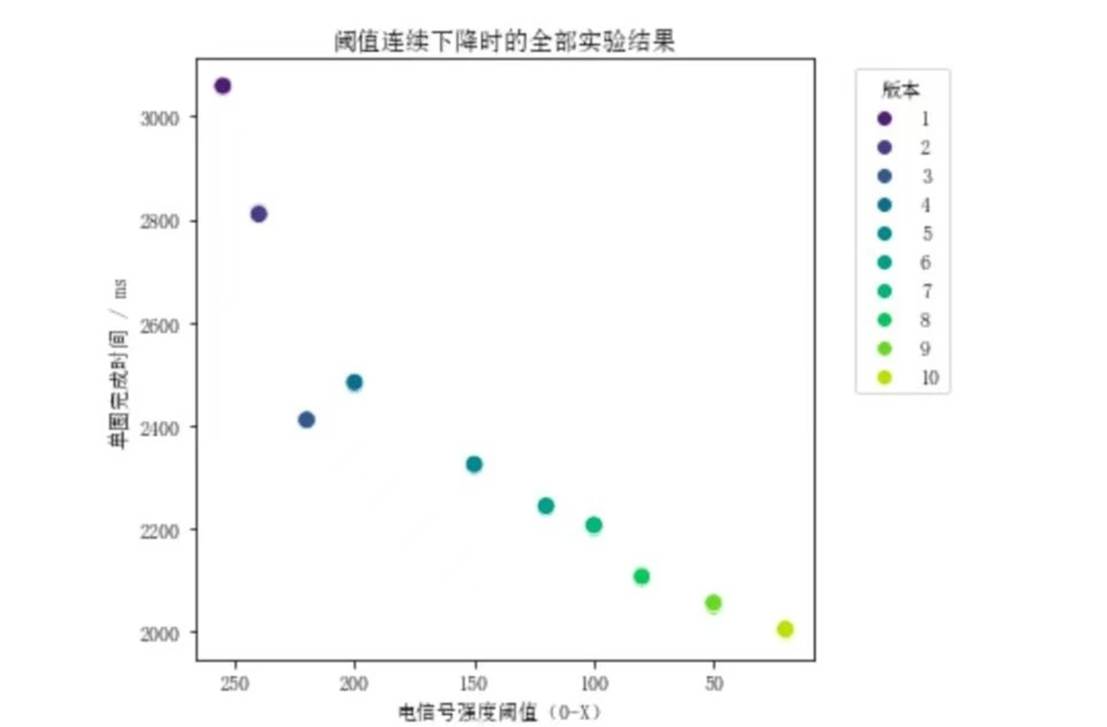
图2:反射式光电传感器的自动驾驶小车信号强度与单圈完成时间的关系
1.3电信号强度50时反射较弱,对应黑线检测状态,传感器输出稳定高电平,小车能精准沿黑线直行,减少不必要的转向调整,从而保持更高平均速度,单圈时间更短。
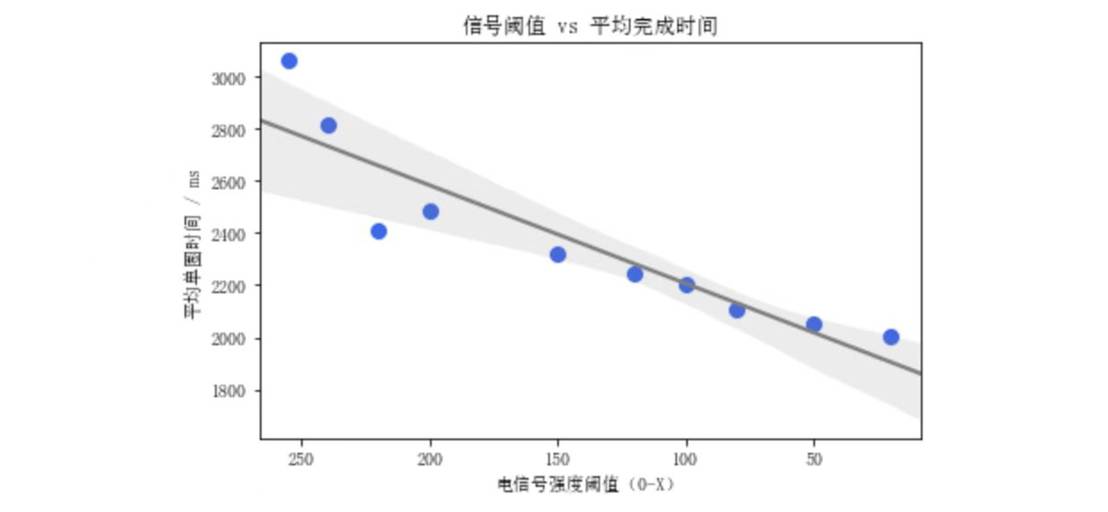
图3:反射式光电传感器的自动驾驶小车信号强度与单圈完成时间的关系
2.避障性能对比
图4可以看出,超声波传感器在多数光照环境下表现稳定,红外传感器在强光或黑暗环境中性能下降。
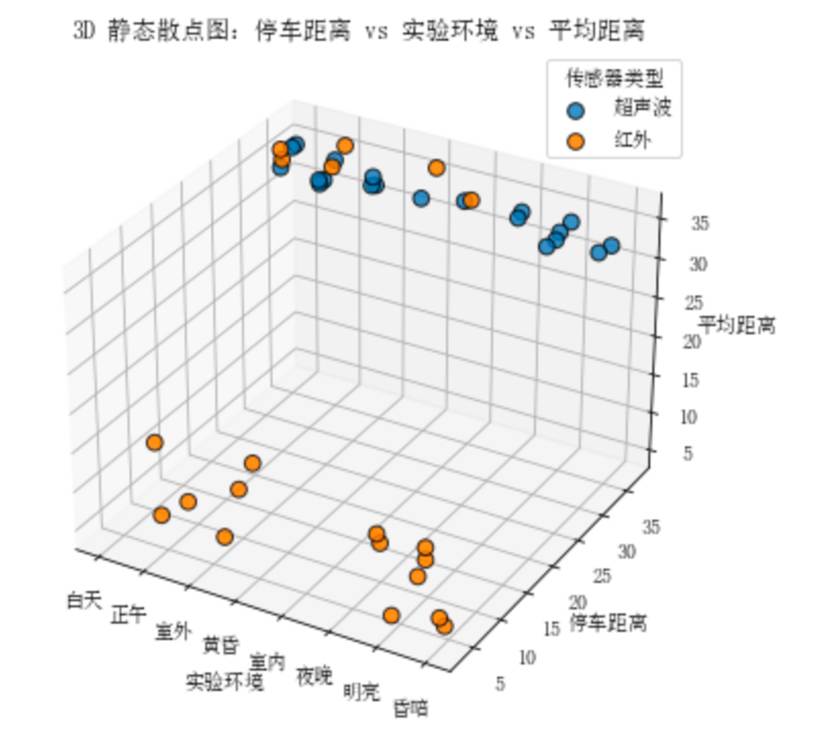
图4:超声波和红外距离传感器的自动小车在不同实验环境下对小车防撞效果的影响
3.行人跟随测试
· 置信度为0.3–0.45时,单人跟踪效果最佳;
· 置信度为0.5–0.55时,抗第二人干扰能力最强;
· 置信度为0.65时,抗第三人干扰效果最佳。
五、结论
本研究成功设计并实现了一款基于Arduino的智能小车,具备自动行驶、避障与行人跟随功能。通过对比超声波与红外传感器的性能,明确了其适用场景。研究结果为低成本智能移动平台的开发提供了实践参考,尤其在传感器选型与跟踪算法调优方面具有指导意义。
六、参考文献
[1] 姜允侃.无人驾驶汽车的发展现状及展望[J].微型电脑应用,2019,35(5):5.
[2] 杨帆.无人驾驶汽车的发展现状和展望[J].上海汽车,2014(3):6.
[3] 刘炜,陆存豪.自动驾驶汽车环境感知传感器研究[J].汽车实用技术,2023,48(10):197-203.
[4] 张新钰,高洪波,赵建辉,等.基于深度学习的自动驾驶技术综述[J].清华大学学报(自然科学版),2018.
附录


检查线路