软体机械手的制作与抓取实验研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手的制作与抓取实验研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
卢彦睿 |
男 |
一(15班) |
组长 |
zp07g04n04 |
|
史志翔 |
男 |
一(15班) |
组员 |
zp07g04n04 |
|
张翔赫 |
男 |
一(15班) |
组员 |
zp07g04n04 |
|
冯植非 |
男 |
一(15班) |
组员 |
zp07g04n04 |
|
指导教师 |
张冠亚 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 设计一款仿生软体机械手,采用柔性材料制作,通过创新的驱动方式实现抓取运动,并通过实验确定影响抓取效果的相关因素。 主要内容: 实验一: 实验对象:选取了五类特性各异的日常物品:①生鸡蛋(极脆、规则);②网球(有弹性、规则球形);③小型毛绒玩具(高度不规则、柔软);④矿泉水瓶(刚性、圆柱形);⑤带柄马克杯(刚性、有特殊结构)。 实验过程:利用硅胶原料及模具制作软体机械手,将机械手固定于洞洞板上,依次将目标物品置于其抓取范围内。启动电机,电机收紧线缆,使软体机械手弯曲包裹物体,维持抓取状态3秒后释放,观察并记录抓取成功率及物品状态。 实验二: 软体机械手抓取物体通常分为指尖抓取和包络抓取两种形式,为了探究软体机械手的实际负载能力,本实验分别进行了指尖抓取测试和包络抓取测试。 实验过程: 1.按照等边三角形布局制作三指手爪,手指间距离为10cm; 2.分别选取3、4、5、6、7、8、9cm的等重小球作为抓取对象,并将轮胎线打结穿过小球; 3.用机械手夹好球体(指尖抓取/包络抓取),用弹簧测力计对其进行测量并记录最大拉力,每个尺寸小球测量10次,取平均值。 实验三: 探究不同手指布局方式对软体机械手抓取性能的影响。 为了探究不同手指布局方式对机械手抓取性能影响,分别对如图1所示得四种手指布局方式进行抓取力测试:
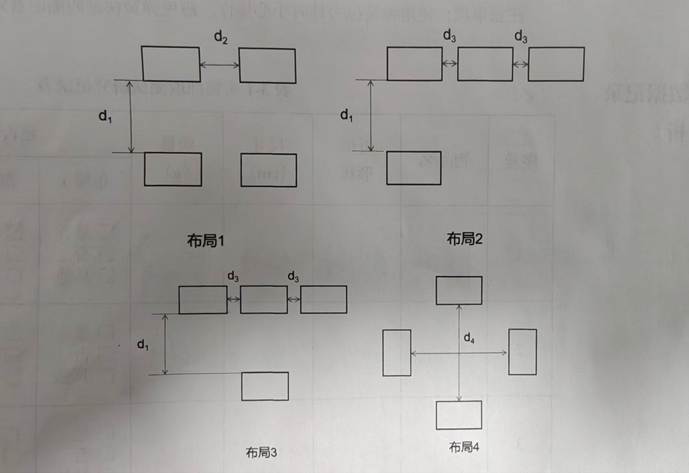
图1:手指不同的布局方式 实验四: 探究不同手指数量对软体机械手抓取性能的影响。 机械手指数量同样可能的对机械手的抓取性能有所影响,为探究手指数量与抓取力的关系,分别测试2根、3根、4根手指的抓取性能。 |
||||
研 究 假 设 |
1、软体机械手对易碎品和不规则物体时,具有传统刚性手无法比拟的安全性和自适应能力。 2、在抓取同一物体时,包络抓取力更大;同时软体机械手的最大抓取力随着球形物体尺寸的增大而缓慢增大。指尖抓取更适合抓取体积较小的物体。 3、布局4对于所有的被测试实物都能很好的进行抓取,抓取的稳定性较好,布局2抓取稳定性较差。 4、2根手指抓取实物的稳定性较差,当手指数量增加到3个时,机械手稳定性明显增加,可以抓取更多种类的实物。 |
||||
研 究 方 法 |
通过3D打印出软体机械手所用的模具,通过浇注、冷凝、成型制作出所使用的软体机械手指;通过不同的手指排布方式,抓取不同的物体,测试抓取力等抓取参数,分析后完成课题研究。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-10月26日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、11月7日-11月9日 1. 课题研究进展中期汇报 2. 成果制作指导课程学习 五、11月10日-11月21日 成果制作和修改 六、11月22日-11月30日 1. 科学海报评选 2. ppt预答辩 七、12月8日 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:软体机械手的制作与抓取实验研究 |
编号:zp07g04n04 |
||
活动时间: 8月 30日 |
第 1 次 |
活动地点:教室 |
|
指导教师:张冠亚 |
班级:一(15)班 |
||
参加活动成员: 组内: 卢彦睿、史志翔、张翔赫、冯植非 组外: |
|||
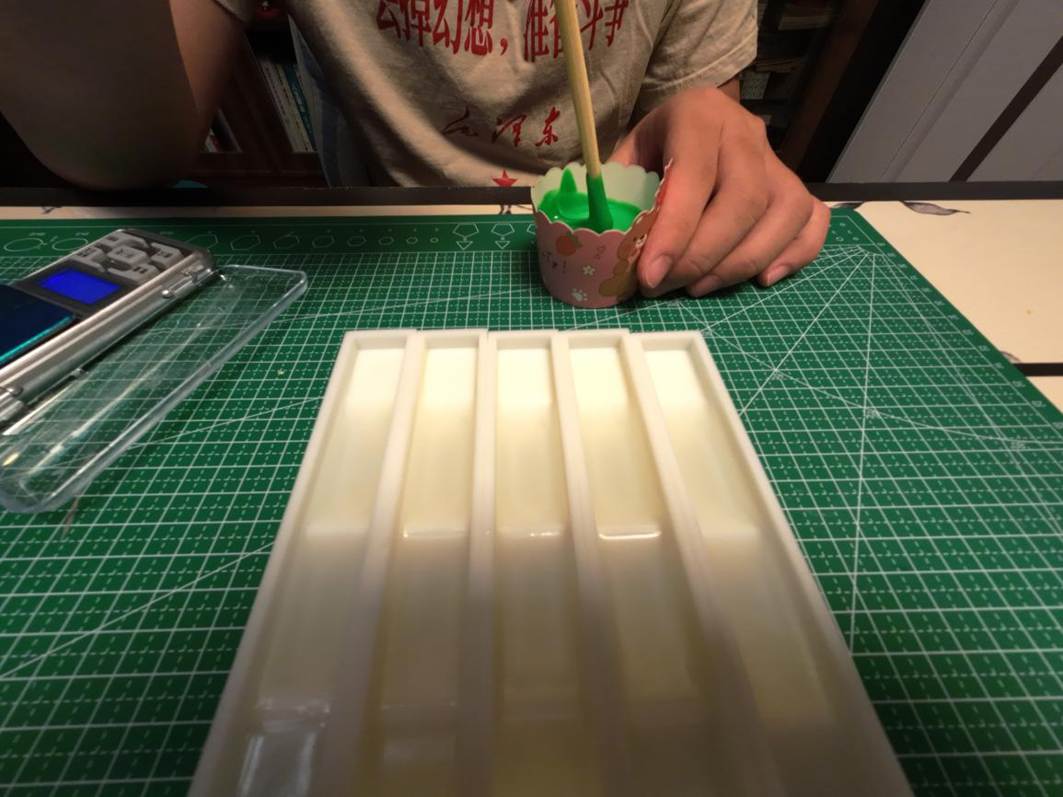
活动内容: 1)目的(解决什么问题): 仿生软体机械手正是基于“柔软”的特性,能够通过自身形变被动适应物体形状,采用柔性材料制作,通过创新的驱动方式实现运动,并通过亲手实验验证其独特的抓取能力。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ①绘制模具图 ②使用纸盒制作简易模具 ③3D打印模具 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) 结果:1、确定了机械爪间距、角度、厚度等参数;2、确定机械爪材料。
记录者: 卢彦睿 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 软体机械手的制作与抓取实验研究 |
编号: |
||||
课题组成员 |
组长:卢彦睿 |
组员:史志翔 张翔赫 冯植非 |
|||
指导教师:张冠亚 |
报告执笔人: 卢彦睿 |
完成时间:10月26日 |
|||
主导课程: |
相关课程: |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 四个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:本实验有力证明了软体机械手在抓取多样化物品,特别是易碎品和不规则物体时,具有传统刚性手无法比拟的安全性和自适应能力。 实验二结果:包络抓取机械手与球体接触面积更大,可以更好地提供支撑;指尖抓取只有少数的几个点可以与球体进行接触,支撑力不够。 实验三结果:布局4对于所有的被测试实物都能很好的进行抓取,抓取的稳定性较好,布局2抓取失败的次数最多,抓取稳定性较差。 实验四结果:2根手指抓取实物的稳定性较差,当手指数量增加到3个时,机械手稳定性明显增加,可以抓取更多种类的实物。 |
|||||
参考书目及资料: [1] Rus, D., Tolley, M. T. Design, fabrication and control of soft robots[J]. Nature, 2015(521), 467-475. [2] Polygerinos, P., Correll, N., Morin S. A., et al. Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction[J]. Advanced Engineering Materials, 2017(19), 1700016. [3] Rich, S. I., Wood, R. J., Majidi, C. Untethered soft robotics. Nature Electronics[J], 2018(1), 102-112. [4] 赵智远.线驱动连续型机械臂运动学与运动规划研究[D]. 长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2019. [5]王子旋.采摘型柔性机械手设计[J].中国农机装备,2025,(10):1-3. [6]付敏,王鹏,王成梦,等.软体机械手关键技术研究进展[J].科技导报,2024,42(08):48-62. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录表(6)份 调查表( )份 测量数据记录( )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4.软体机械手的制作与抓取实验研究
徐州市第一中学高一15班 卢彦睿、史志翔、张翔赫、冯植非
【摘要】传统刚性机械手在抓取易碎、不规则物品时面临挑战。受章鱼、象鼻等生物启发,软体机械手应运而生。本文综述了软体机械手的气动、液压及智能材料驱动等研究进展,并通过自制的简易线缆驱动软体机械手模型,成功进行了对鸡蛋、网球、毛绒玩具等多类物品的抓取实验。实验验证了其在自适应抓取与安全性方面的显著优势。本文进一步总结了研究的低成本实践与多场景测试创新点,并规划了集成传感、结构优化等后续研究方向,以期为软体机械手的普及与应用提供中学生视角的思考。
【关键词】软体机械手;仿生机器人;线缆驱动;自适应抓取
一、 引言
在机器人技术日益融入工业与生活的今天,机械手作为执行操作的关键部件,其性能至关重要。然而,常见的刚性机械手虽精度高、负载强,却在抓取鸡蛋、水果等易碎品或形状不规则的物品时,极易因控制精度和力度问题导致损坏。这一局限性促使我们向自然界寻求灵感。章鱼的触手能够轻柔而牢固地缠绕各种物体,大象的鼻子既能拔树也能拾起细小的果实。这些生物器官的共性在于其“柔软”的特性,能够通过自身形变被动适应物体形状。仿生软体机械手正是基于这一原理,采用柔性材料制作,通过创新的驱动方式实现运动,展现出卓越的安全性和环境适应性。本研究旨在探讨软体机械手的技术发展,并通过亲手实验验证其独特的抓取能力。
二、 研究进展:软体机械手的驱动方式
软体机械手的核心在于其“柔性驱动”,目前主要的技术路径有以下四种:
气动驱动:这是目前技术最成熟、应用最广泛的驱动方式。其原理是向由硅橡胶等弹性材料制成的软体腔室中充入气体(如空气),腔室内压增大导致腔壁发生膨胀和弯曲,从而产生所需的抓取动作。通过精心设计腔室形态和气路布局,可以实现抓取、弯曲、缠绕等多种运动模式。气动驱动具有力量大、动作柔和、成本相对较低的优点[1]。
液压驱动:其工作原理与气动驱动相似,但使用水或油等不可压缩的液体作为传动介质。这使得液压驱动能够输出更大的力,且控制更为精确。然而,液体泄漏的风险以及泵、阀等辅助系统的复杂性,使其在小型化和便携化方面面临挑战[2]。
智能材料驱动:这是一类面向未来的前沿技术,主要包括形状记忆合金(SMA)和介电弹性体(DEA)等。例如,形状记忆合金在通电加热后,会收缩恢复到其预先记忆的形状,从而产生驱动力。这类驱动方式可以实现几乎无声、结构极其紧凑的驱动,但目前普遍存在响应速度较慢、输出力有限或需要高驱动电压等问题[3]。
线缆驱动:它通过安装在柔性手指内部的柔索(线缆)来牵引其弯曲,如同牵动木偶。当电机收紧线缆时,手指会向一侧弯曲,实现抓取动作。这种方式结合了柔性结构的自适应性和传统电机的高精度控制,使机械手既能轻柔抓取不规则物体,又能实现相对快速、准确的动作[4]。
综合考虑安全性、可行性与成本,本研究选择线缆驱动方案来构建实验模型。
三、 抓取物品实验与结果分析
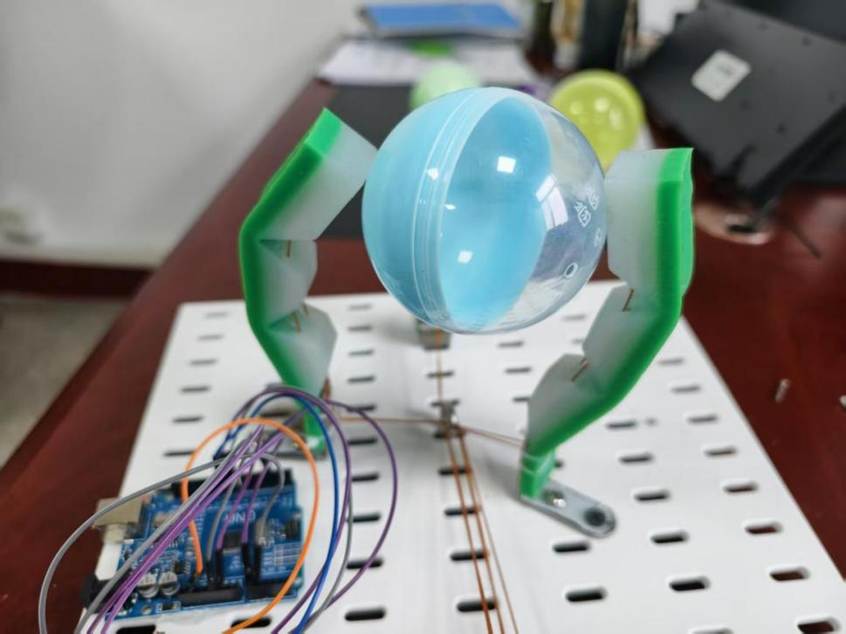
为直观验证软体机械手的性能,我们利用硅胶、线缆及Arduino控制器,自制了三指线缆软体机械手模型。
课题一:
实验对象:选取了五类特性各异的日常物品:①生鸡蛋(极脆、规则);②网球(有弹性、规则球形);③小型毛绒玩具(高度不规则、柔软);④矿泉水瓶(刚性、圆柱形);⑤带柄马克杯(刚性、有特殊结构)。
实验过程:利用硅胶原料及模具制作软体机械手,将机械手固定于洞洞板上,依次将目标物品置于其抓取范围内。启动电机,电机收紧线缆,使软体机械手弯曲包裹物体,维持抓取状态3秒后释放,观察并记录抓取成功率及物品状态。实验结果如表1所示:
表1 抓取对象的质量和尺寸研究记录表
序号 |
物品名 |
近似形状 |
最大尺寸(cm) |
质量(g) |
是否抓取成功 |
1 |
生鸡蛋 |
椭球 |
5 |
50.2 |
是 |
2 |
塑料球 |
圆球 |
9 |
60.2 |
是 |
3 |
小型毛绒玩具 |
不规则 |
10 |
101.2 |
是 |
4 |
矿泉水瓶 |
圆柱 |
10 |
17.4 |
是 |
5 |
带柄马克杯 |
圆柱(有特殊结构) |
10 |
502.6 |
否 |
实验结果与分析:
成功抓取案例:对于生鸡蛋、网球、毛绒玩具和矿泉水瓶,软体机械手均实现了稳定、无损抓取。在抓取鸡蛋时,手指均匀包裹并分散压力,确保了鸡蛋完好无损。在抓取毛绒玩具时,手指能自适应其不规则轮廓,形成紧密的“拥抱式”抓取。
卓越的自适应性:实验充分展现了软体机械手的核心优势——被动自适应。其柔性结构能无需复杂控制即可贴合各种形状表面,通过增大接触面积和摩擦力实现稳定抓持。
失败案例与分析:对于带柄马克杯,机械手无法有效实现抓取,在提升时易滑落。这表明,面对有孔洞、内凹等特殊结构的物体,单纯的包络式抓取策略存在局限,需要结合诸如“夹捏”或“吸附”等更高级的策略。
实验结论:本实验有力证明了软体机械手在抓取多样化物品,特别是易碎品和不规则物体时,具有传统刚性手无法比拟的安全性和自适应能力。
课题二:探究不同抓取方式对软体机械手抓取性能的影响
软体机械手抓取物体通常分为指尖抓取和包络抓取两种形式,为了探究软体机械手的实际负载能力,本实验分别进行了指尖抓取测试和包络抓取测试。
实验过程:1.按照等边三角形布局制作三指手爪,手指间距离为10cm;
2. 分别选取3、4、5、6、7、8、9cm的等重小球作为抓取对象,并将轮胎线打结穿过小球;
3. 用机械手夹好球体(指尖抓取/包络抓取),用弹簧测力计对其进行测量并记录最大拉力,每个尺寸小球测量10次,取平均值。
实验结果与分析:
实验结果如表2所示:
表2不同直径球体的实验结果表
球体直径(cm) |
抓取方式 |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
平均值(N) |
指尖抓取力 |
5.7 |
4.97 |
3.96 |
3.34 |
2.73 |
2.16 |
1.82 |
包络抓取力 |
8.13 |
7.34 |
6.87 |
6.32 |
5.41 |
4.83 |
4.21 |
由表可以看出,在抓取同一物体时,包络抓取力更大;同时软体机械手的最大抓取力随着球形物体尺寸的增大而缓慢增大。指尖抓取更适合抓取体积较小的物体。
包络抓取与指尖抓取最大的区别在于接触面积得不同,包络抓取机械手与球体接触面积更大,可以更好地提供支撑;指尖抓取只有少数的几个点可以与球体进行接触,支撑力不够。
课题三:探究不同手指布局方式对软体机械手抓取性能的影响
为了探究不同手指布局方式对机械手抓取性能影响,分别对如图1所示得四种手指布局方式进行抓取力测试:
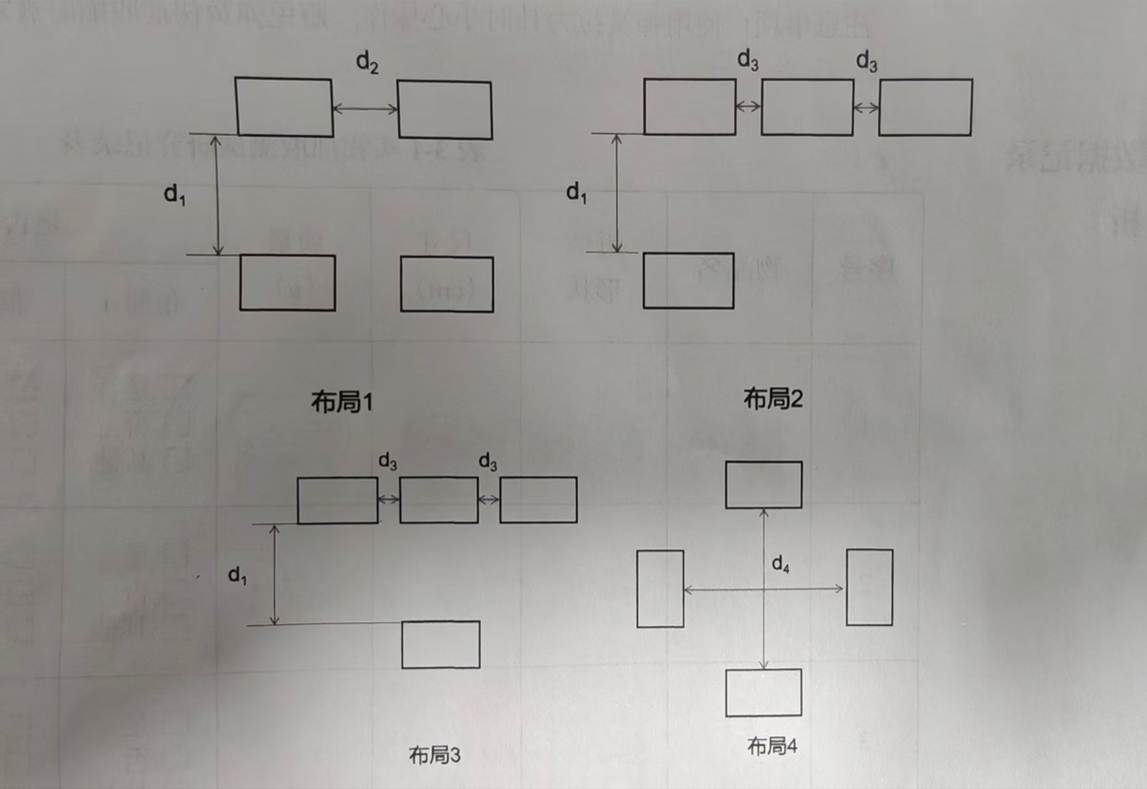
图1:手指不同的布局方式
实验结果如表3、表4所示:
表3 实物抓取研究记录表
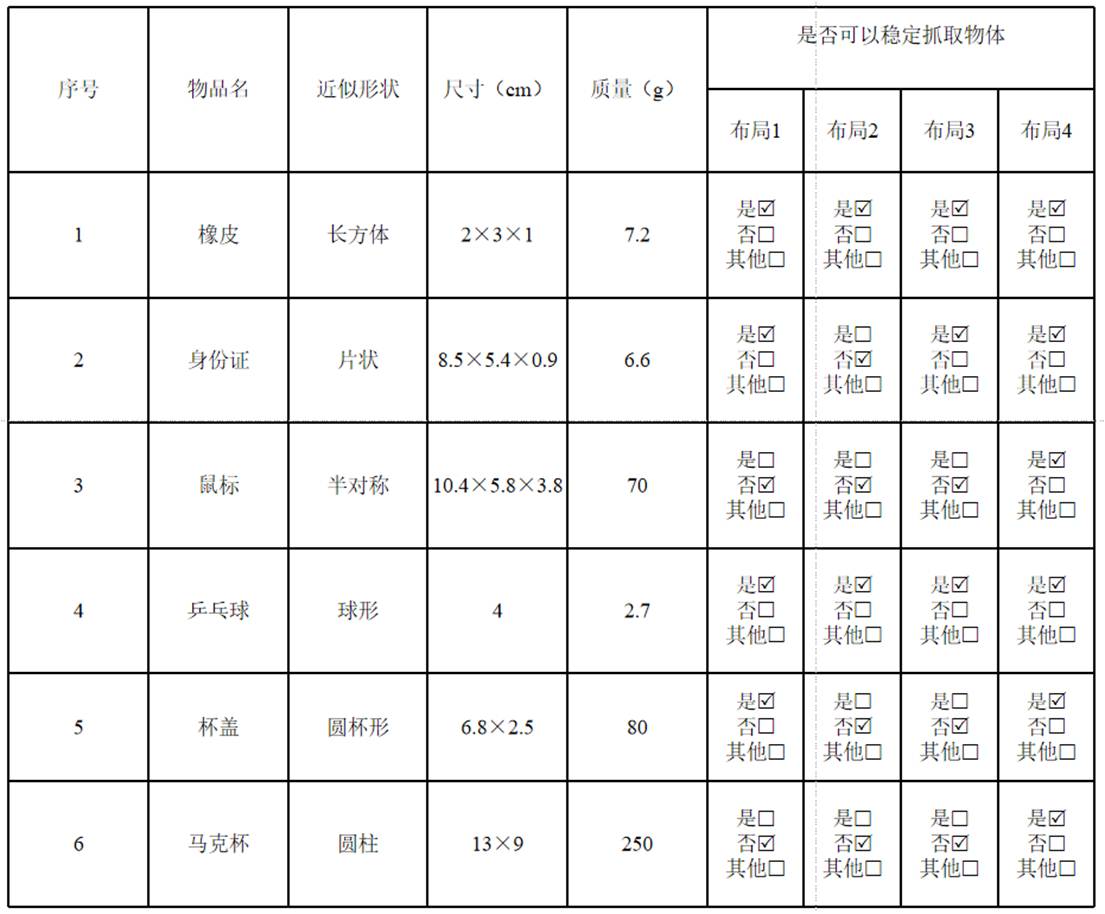
表4 指尖抓取和包络抓取性能测试研究记录表
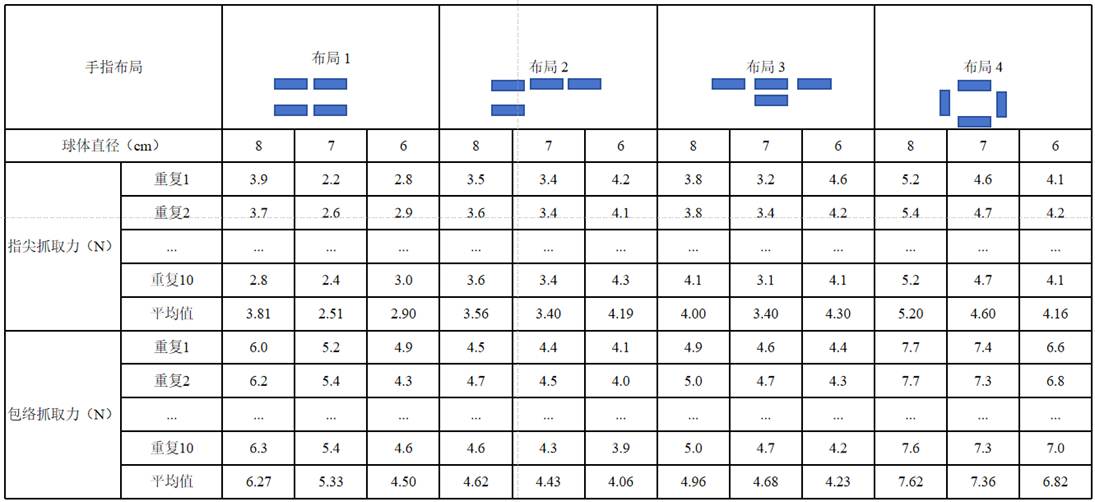
通过表3可以看出,布局4对于所有的被测试实物都能很好的进行抓取,抓取的稳定性较好,布局2抓取失败的次数最多,抓取稳定性较差。表4展示了不同布局的指尖抓取力及包络抓取力的差别,可以看出,布局4指尖抓取力及包络抓取力均较高,布局2最差。
课题4:探究不同手指数量对软体机械手抓取性能的影响
机械手指数量同样可能的对机械手的抓取性能有所影响,为探究手指数量与抓取力的关系,分别测试2根、3根、4根手指的抓取性能。结果如表5、表6所示:
表5 实物抓取测试研究记录表
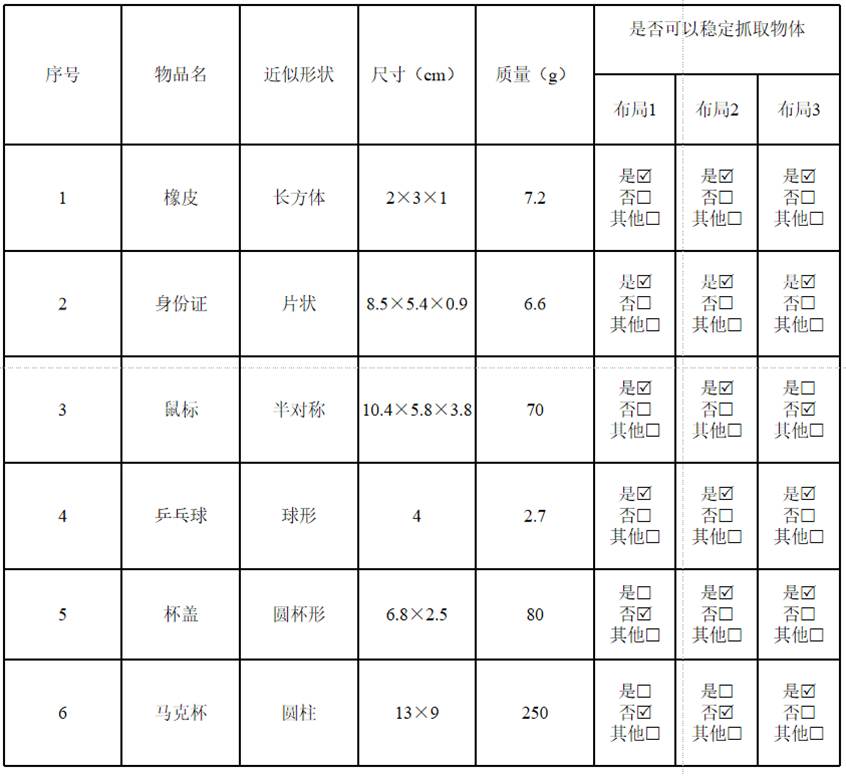
表6 指尖抓取和包络抓取性能测试研究记录表
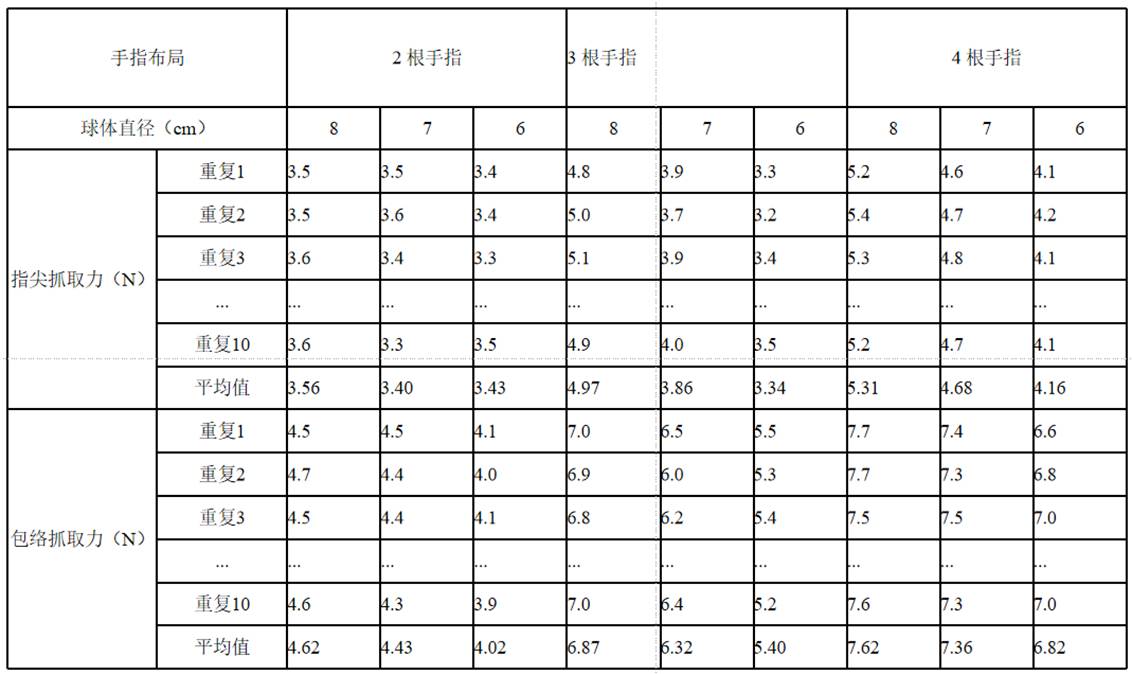
由表5可以看出,2根手指抓取实物的稳定性较差,当手指数量增加到3个时,机械手稳定性明显增加,可以抓取更多种类的实物;由表6可以看出,随着手指数的增加,指尖抓取力及包络抓取力都有一定程度的增加,这是因为手指越多,手指与球体接触面积越大,对球体的支撑越充分,使得抓取力越大。
四、 本研究的创新点
实践导向的科普探索:本研究突破了纯理论探讨,通过亲手设计、制作和测试,将前沿的软体机器人技术以生动、可触可感的方式呈现,对激发中学生对前沿科技的兴趣具有积极的推广价值。
系统的多维度性能测试:我们精心选择了从易碎到坚韧、从规则到不规则的多种物品进行系统性测试,全面而直观地展示了软体机械手的性能边界,为后续优化提供了明确方向。
低成本原型机的成功验证:完整地演示了如何利用常见、低成本的材料打造出功能完备的实验原型,为资源有限的中学实验室或科技爱好者开展类似创新实践提供了可行路径与宝贵经验。
五、 结论
1、软体机械手抓取轻质物体性能佳,于指尖与包络抓取中,包络抓取力更大;指尖抓取更适小体积物体。
2、不同布局方式,适配抓取的物体形状各异。布局4的指尖与包络抓取力最强,布局1次之,布局2的软体机械手,其指尖与包络抓取力较弱。
3、软体机械手指数量影响抓取性能,手指增多显著提升其对不规则物体的抓取成功率与稳定性;三指稳定性较两指显著提升,受力更均匀,综合性能好。
六、参考文献
[1] Rus, D., Tolley, M. T. Design, fabrication and control of soft robots[J]. Nature, 2015(521), 467-475.
[2] Polygerinos, P., Correll, N., Morin S. A., et al. Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction[J]. Advanced Engineering Materials, 2017(19), 1700016.
[3] Rich, S. I., Wood, R. J., Majidi, C. Untethered soft robotics. Nature Electronics[J], 2018(1), 102-112.
[4] 赵智远.线驱动连续型机械臂运动学与运动规划研究[D]. 长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2019.
[5]王子旋.采摘型柔性机械手设计[J].中国农机装备,2025,(10):1-3.
[6]付敏,王鹏,王成梦,等.软体机械手关键技术研究进展[J].科技导报,2024,42(08):48-62.
附录

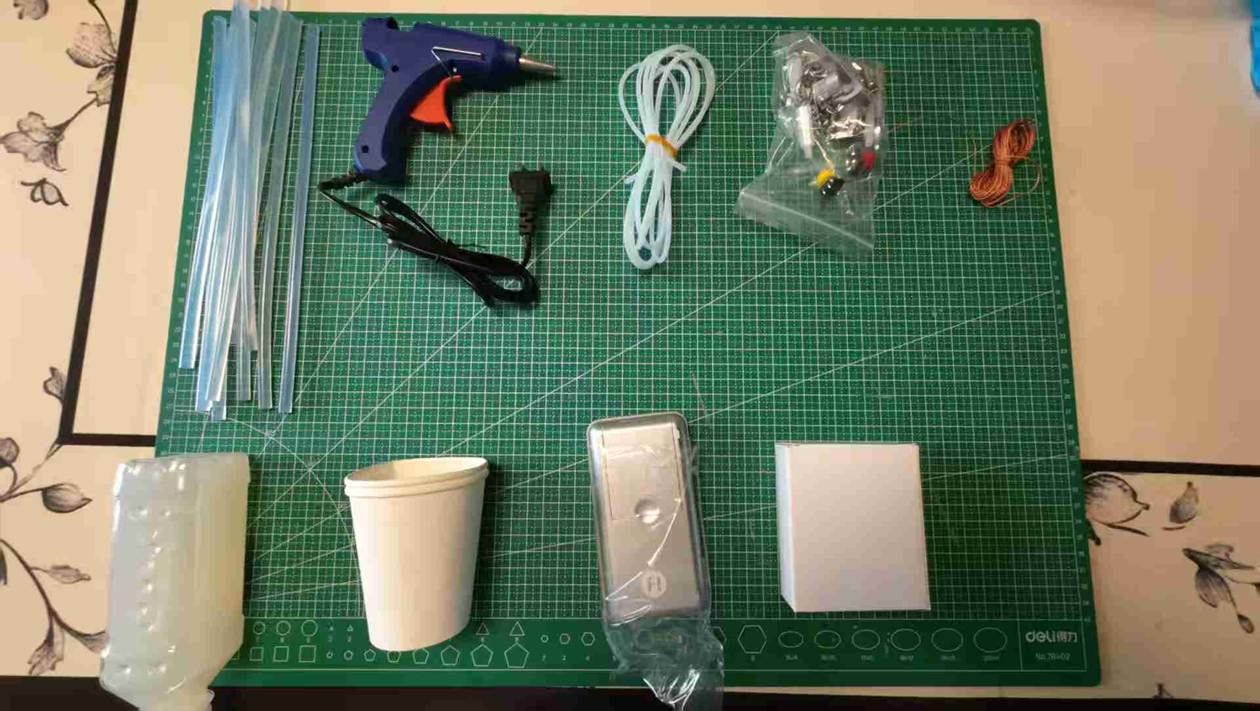
实验材料
任务项目学习制作的思维导图
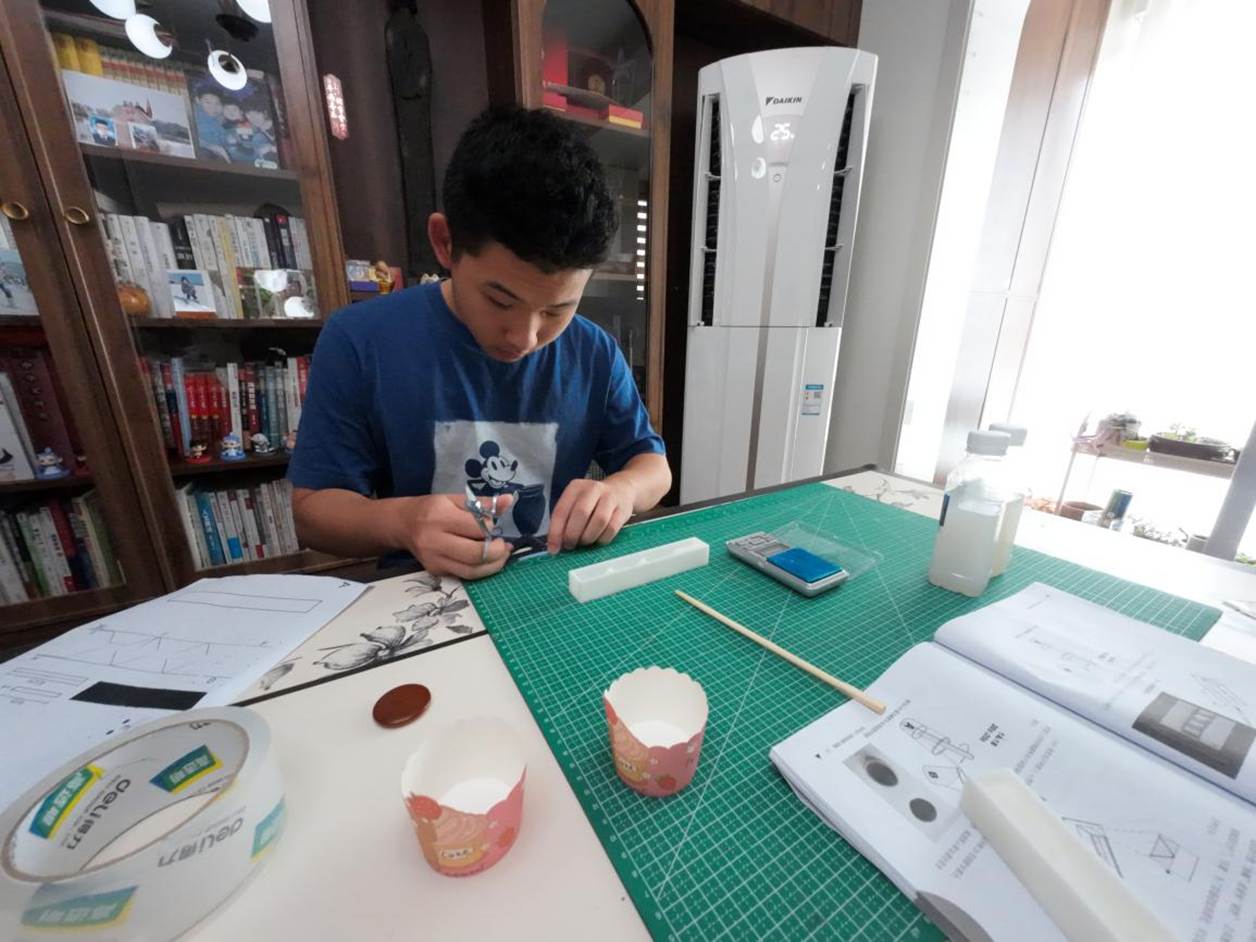


小组协作