超声波雷达
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
超声波雷达 |
||||
课 题组 成员 及有 关情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
黄语轩 |
男 |
高一15 |
组长 |
||
王啸洋 |
男 |
高一15 |
组员 |
||
曲柯宇 |
男 |
高一15 |
组员 |
||
翟浩宇 |
男 |
高一15 |
组员 |
||
吴浩楠 |
男 |
高一15 |
组员 |
||
指导教师 |
邵馨悦 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的:本研究旨在通过自主搭建的微型超声波雷达平台,定量与定性相结合地分析不同物体特性对HC-SR04超声波传感器测距效果的影响。 主要内容: 探究材质的影响: 验证不同材质(如亚克力、木材、海绵)对超声波反射强度的差异,并分析其对最大可测距离和测量稳定性的影响。 探究角度的影响:研究被测物体相对于超声波传感器中心轴的摆放角度变化,如何影响雷达系统的有效探测视角和识别能力。 探究宽度的影响: 分析被测物体宽度变化对测量宽度值准确性的影响,并尝试分析测量误差的来源。 |
||||
研 究 器 材 |
本实验的核心硬件构成如下:控制核心: Arduino UNO 开发板,负责整个系统的逻辑控制与数据处理。 测距模块:HC-SR04 超声波传感器,是本研究的核心测量单元。 扫描机构:SG90 舵机,用于驱动超声波传感器进行 0-180 度的周期性旋转,实现扇形区域扫描。 机械结构:定制切割的雷达结构木片、M2/M3 规格的螺丝、螺母、10mm/20mm 双通圆柱等,用于组装雷达的固定支架和旋转平台。 连接件 杜邦线用于电路连接,方口 USB 数据线为系统供电。 被测物体:包括不同材质(亚克力板、木板、海绵)、不同角度(0°至 75°)以及不同宽度规格的标准化样本。 |
||||
研 究 方 法 |
实验系统的搭建主要分为机械组装、电路连接和软件编程三个部分。 机械组装:将HC-SR04超声波传感器通过木片支架固定在SG90舵机的转盘上,确保传感器随舵机同步旋转。整个结构应保持稳定,减少晃动对测量精度的影响。 电路连接:使用杜邦线将 HC-SR04 的各个接口与其相对应的接口连接 软件编程:使用 Arduino IDE 编写控制程序。程序主要实现功能:控制舵机以特定步进角度(如 1°或 2°)在指定角度范围内(如 0°-180°)匀速转动。 |
|||
研 究 步 骤 (各 阶段 的主 要内 容和 时间 安排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片二、8月26日-8月27日领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选七、9月底闭幕式,进行成果的汇报与表彰 |
|||
成 果形 式 |
PPT,论文 |
|||
论 证小 组意 见 |
论证人签名: |
年 |
月 |
日 |
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:超声波雷达 |
编号: |
||
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
|
指导教师:邵馨悦 |
班级:高一15班 |
||
参加活动成员: 组内: 黄语轩、王啸洋、曲柯宇、翟浩宇、吴浩楠 |
|||
活动内容: 1) 目的(解决什么问题): 本研究旨在通过自主搭建的微型超声波雷达平台,定量与定性相结合地分析不同物体特性对 HC-SR04超声波传感器测距效果的影响。 2) 形式(小组讨论、试验、查阅资料、调查、实地测量):实验、查阅资料、小组讨论。 3) 过程: ①各自在家进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 4) 结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题)本研究通过自主设计的微型超声波雷达实验平台,系统地验证了物体特性对HC-SR04超声波传感器测距效果的显著影响,并得出以下核心结论: 材质是决定探测成败与距离的关键。物体的声波反射能力直接决定了回波信号强度。坚硬、平整、致密的材质是超声波雷达的理想探测目标,而柔软、多孔、粗糙的材质则会因其强烈的声波吸收和散射效应导致探测失败。 角度是影响探测范围的核心因素。被测物体相对于传感器波束的摆放角度决定了有效探测视角。角度越大,回波信号越弱,有效视角越小,直至完全无法探测。这限制了雷达对非正对物体的识别能力。 宽度测量存在固有的系统误差。由于超声波波束的物理特性、边缘效应以及可能的多路径干涉,对物体宽度的测量易产生偏差,且在本实验条件下表现为测量值普遍大于实际值的系统误差。提高宽度测量精度需要更复杂的信号处理算法和更高性能的硬件。 记录者: 曲柯宇 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 超声波雷达 |
编号: |
||||
课题组成员 |
组长:黄语轩 |
组员:王啸洋、曲柯宇、翟浩宇、吴浩楠 |
|||
指导教师:邵馨悦 |
报告执笔人: 曲柯宇 |
完成时间:9月28日 |
|||
主导课程:超声波雷达 |
相关课程:物理学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:实验数据清晰地显示,不同材质的平均测量距离存在显著差异。对于表面坚硬、光滑且结构致密的T型亚克力塑料板和T型木板,雷达能够在20cm甚至更远的距离上获得稳定、准确的回波信号。相反,对于柔软、多孔且表面粗糙的海绵,雷达几乎无法探测到有效的回波,测量距离极不稳定或显示为无效值。 实验二结果:实验数据显示,当亚克力板垂直于雷达波束(即角度为0°)时,雷达能够探测到该物体的角度范围最大,即有效视角最大。随着亚克力板摆放角度的增加(如15°,30°, 45°),雷达能探测到它的角度范围(视角)呈现明显的下降趋势。当角度增大至60°和75° 时,视角数据记录为NaN,意味着在这些角度下,雷达无法稳定识别物体。 实验三结果:从数据中可以看出,随着宽度规格的增加,实际宽度和雷达测量的平均测量宽度都呈现上升趋势,说明雷达能够在一定程度上响应物体宽度的变化。然而,一个关键发现是:平均测量宽度普遍高于实际宽度。这表明测量过程中存在稳定的系统误差。 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表(1)份 实验记录(1)份调查表(1)份 测量数据记录(1)份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号:名称:制作者:内容:功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4.超声波雷达
徐州市第一中学高一15班 黄语轩、王啸洋、曲柯宇、翟浩宇、吴浩楠一、引言
1.1 研究目的与内容
本研究旨在通过自主搭建的微型超声波雷达平台,定量与定性相结合地分析不同物体特性对HC-SR04超声波传感器测距效果的影响。具体研究目的如下:
4. 探究材质的影响: 验证不同材质(如亚克力、木材、海绵)对超声波反射强
度的差异,并分析其对最大可测距离和测量稳定性的影响。
5. 探究角度的影响:研究被测物体相对于超声波传感器中心轴的摆放角度变化,如何影响雷达系统的有效探测视角和识别能力。
6. 探究宽度的影响: 分析被测物体宽度变化对测量宽度值准确性的影响,并尝试分析测量误差的来源。
二、实验系统设计与方法
2.1 实验材料与仪器
本实验的核心硬件构成如下:
• 控制核心: Arduino UNO 开发板,负责整个系统的逻辑控制与数据处理。
• 测距模块:HC-SR04 超声波传感器,是本研究的核心测量单元。
• 扫描机构:SG90 舵机,用于驱动超声波传感器进行 0-180 度的周期性旋转,实现扇形区域扫描。
• 机械结构:定制切割的雷达结构木片、M2/M3 规格的螺丝、螺母、10mm/20mm
双通圆柱等,用于组装雷达的固定支架和旋转平台。
• 连接件 杜邦线用于电路连接,方口 USB 数据线为系统供电。
• 被测物体:包括不同材质(亚克力板、木板、海绵)、不同角度(0°至 75°)以及不同宽度规格的标准化样本。
2.2 系统搭建与实验步骤
实验系统的搭建主要分为机械组装、电路连接和软件编程三个部分。
4. 机械组装:将 HC-SR04 超声波传感器通过木片支架固定在 SG90 舵机的转盘上,确保传感器随舵机同步旋转。整个结构应保持稳定,减少晃动对测量精度的影响。
5. 电路连接:使用杜邦线将 HC-SR04 的各个接口与其相对应的接口连接
6. 软件编程:使用 Arduino IDE 编写控制程序。程序主要实现功能:控制舵机以特定步进角度(如 1°或 2°)在指定角度范围内(如 0°-180°)匀速转动。
7. 实验方法与过程:将当前角度和对应的距离数据通过串口发送至计算机进行记录。
实验采用控制变量法,分三组进行:
材质实验: 固定物体距离、角度和宽度,依次更换不同材质的物体,记录雷达能稳定测得的平均距离。
角度实验: 固定物体距离、材质和宽度,改变亚克力板相对于雷达中心轴的夹角(如 0°,15°,30°,45°,60°,75°),测量并记录雷达能探测到该物体的角度范围(即视角)。
宽度实验: 固定物体距离、材质和角度,依次更换不同宽度的物体,记录雷
达测量的平均宽度值,并与实际宽度进行对比。
三、结果与分析讨论
3.1 物体材质对超声波雷达识别的影响

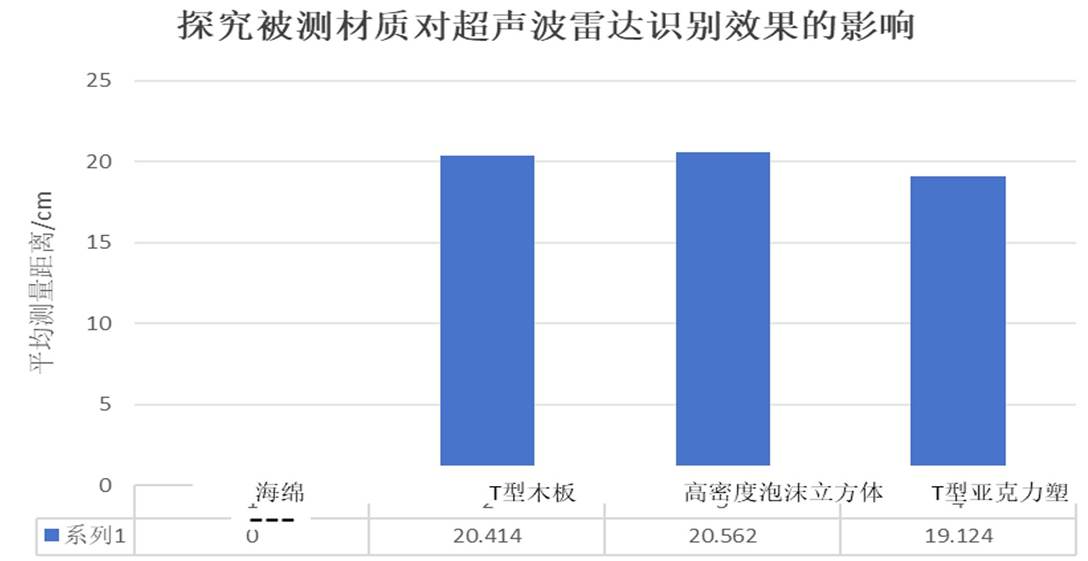
结果呈现:实验数据清晰地显示,不同材质的平均测量距离存在显著差异。对于表面坚硬、光滑且结构致密的T型亚克力塑料板和T型木板,雷达能够在20cm 甚至更远的距离上获得稳定、准确的回波信号。相反,对于柔软、多孔且表面粗糙的海绵,雷达几乎无法探测到有效的回波,测量距离极不稳定或显示为无效值。
分析与讨论:这一现象的根本原因在于超声波在不同材质表面的反射机理。超声波是一种机械波,其在传播过程中遇到物体时会发生反射、吸收和散射。
• 坚硬平整材质(亚克力、木板):其分子结构紧密,表面光滑,声阻抗与空气差异巨大。当超声波撞击到此类表面时,大部分能量会像光在镜面上一样发生镜面反射,能量损失小,回波信号强且清晰。因此,传感器能够轻松捕捉到回波,实现远距离、高精度的测量。
• 柔软多孔材质(海绵):其内部充满大量空气孔隙,结构疏松。当超声波撞击时,会发生复杂的散射和吸收。声波能量会分散到各个方向,并且大量声能会被材料内部的纤维和空气摩擦转化为热能而消耗掉。导致返回传感器的回波信号极其微弱,信噪比过低,无法被 HC-SR04 模块有效识别,从而表现为探测失败。此结论与文档1的推测完全吻合,即“材质本身的特性,如材质的密度、表面光滑程度等因素可能影响了超声波雷达的识别效果”。这提示我们,在实际应用中,超声波雷达更适用于检测硬质物体,对于软质、多孔或纤维状物体的检测是其应用的局限性所在。
3.2 物体摆放角度对超声波雷达识别效果的影响
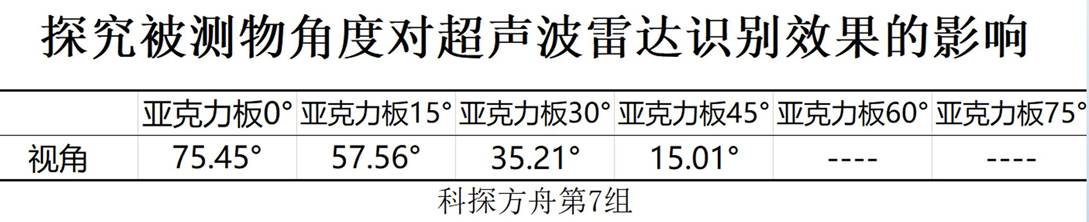
结果呈现:实验数据显示,当亚克力板垂直于雷达波束(即角度为0°)时,雷达能够探测到该物体的角度范围最大,即有效视角最大。随着亚克力板摆放角度的增加(如15°,30°,45°),雷达能探测到它的角度范围(视角)呈现明显的下降趋势。当角度增大至60°和75°时,视角数据记录为NaN,意味着在这些角度下,雷达无法稳定识别物体。
分析与讨论:此现象揭示了超声波雷达的波束覆盖范围和入射角效应。HC-SR04 传感器发射的超声波并非理想的平行束,而是存在一个具有一定开角的锥形波束。
• 角度为 0°(正入射):物体表面与波束中心轴垂直,此时声波以接近 90 度的入射角垂直射向物体表面,反射波沿原路返回传感器的效率最高,信号强度最大。因此,即使物体稍微偏离中心轴(处于波束锥角边缘),仍能有足够强的回波被检测到,故而有效视角最大。
• 角度增大(斜入射):物体表面与波束中心轴形成夹角。根据反射定律,反射波将沿着与入射角相等的反射角方向传播,而不再直接返回传感器。此时,只有部分散射能量可能回到传感器。随着角度增大,这种“反射波偏离”效应愈发显著,导致回波信号强度急剧衰减。物体必须更加精确地位于波束中心附近才能被探测到,因此有效视角变小。
•角度过大(60°、75°):入射角过大,反射波几乎完全偏离传感器接收方向,回
波信号强度低于传感器的检测阈值。如文档 1 所推测,“可能是在测量过程中出
现了问题,例如测量设备在这两个角度下无法正常工作”,此处的“无法正常工作” 正是由上述物理原理导致的必然结果,而非设备故障。数据记录为无效值准确地反映了这一物理极限。
3.3 物体宽度对超声波识别效果的影响
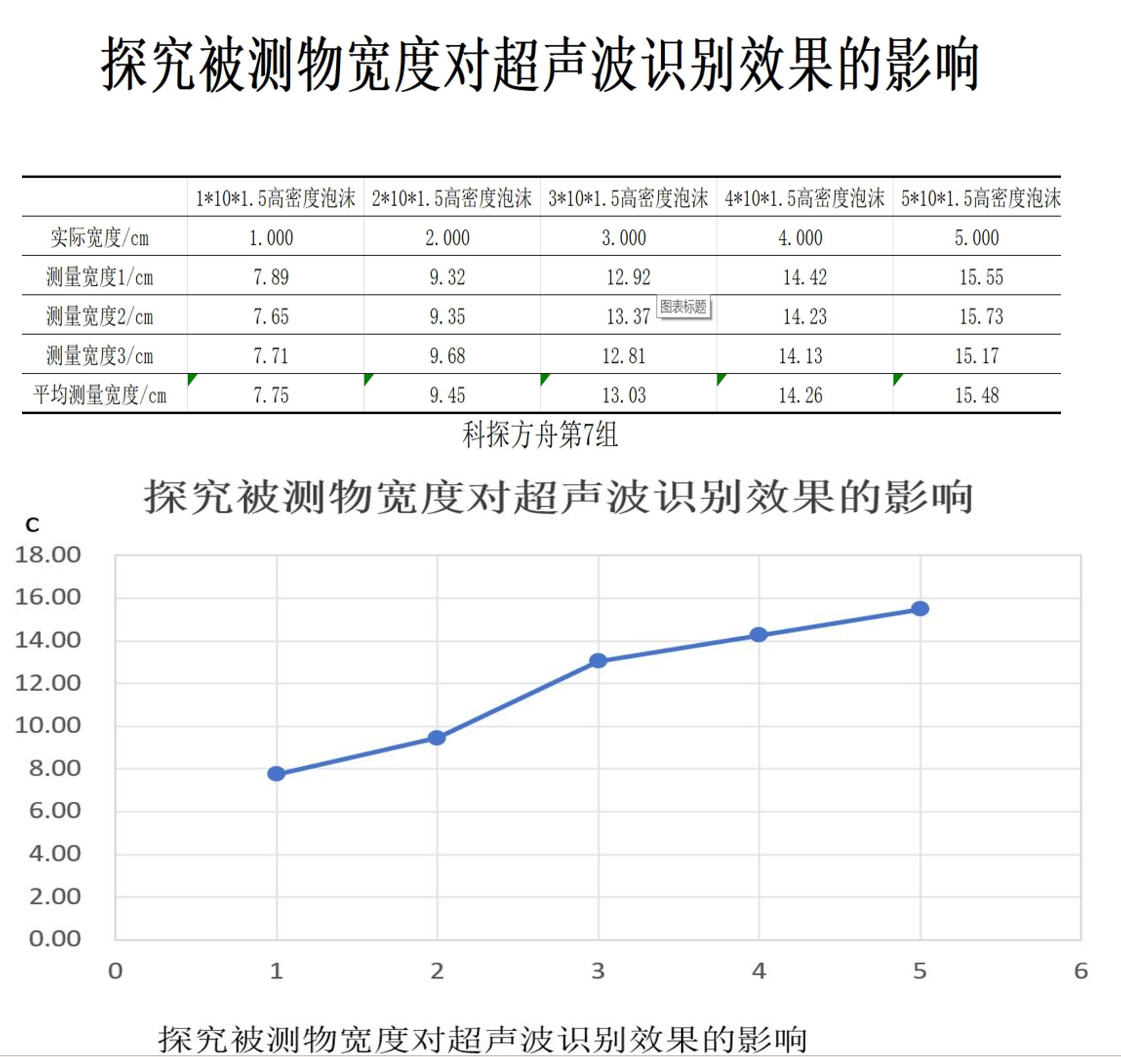
结果呈现:从数据中可以看出,随着宽度规格的增加,实际宽度和雷达测量的平均测量宽度都呈现上升趋势,说明雷达能够在一定程度上响应物体宽度的变化。然而,一个关键发现是:平均测量宽度普遍高于实际宽度。这表明测量过程中存在稳定的系统误差。
分析与讨论:物体宽度对测量的影响机制更为复杂,主要涉及波束特性与信号处理。
1. 波束覆盖与边缘效应:超声波波束有一定的宽度。当测量一个有限宽度的物体时,波束可能同时覆盖物体和背景。在物体的边缘处,回波开始时间会存在一个过渡区,而不是一个瞬间跳变。算法在判断物体边界时会产生不确定性,导致测量的宽度值大于实际宽度。
2. 多路径反射与干涉:当物体较宽时,超声波从物体表面不同点反射回来,这
反射波(回波)在传播路径上可能相互叠加,产生干涉现象。建设性干涉可能使某些点的信号虚假增强,而破坏性干涉则可能使信号减弱。这种复杂的干涉图案会干扰对真实回波到达时间的精确判断,从而引入测量误差。
3. 系统误差分析:如文档 1 和文档 2 所指出的,测量值普遍偏大暗示存在系统误差。
可能的来源包括:
• 仪器特性:HC-SR04 模块本身的触发-检测电路可能存在微小的延迟。
• 声速设定:实验中使用 340m/s 作为标准声速,但实际环境温度变化会导致声速变化,进而带来计算误差。
• 测量方法:本实验采用旋转扫描法测量宽度,舵机旋转的机械误差、角度步进的精度都会累积到宽度计算中。文档2中提到“实际实验过程中由于我组所安装雷达精度欠佳,难以精确测量出实际宽度”,这正反映了上述因素的综合影响。
通过比较误差值的大小而非绝对精度来得出结论,是一种在现有系统精度限制下依然能揭示趋势的合理科学方法。
四、结论与展望
4.1 研究结论
本研究通过自主设计的微型超声波雷达实验平台,系统地验证了物体特性对
HC-SR04超声波传感器测距效果的显著影响,并得出以下核心结论:
3. 材质是决定探测成败与距离的关键。物体的声波反射能力直接决定了回波信号强度。坚硬、平整、致密的材质是超声波雷达的理想探测目标,而柔软、多孔、粗糙的材质则会因其强烈的声波吸收和散射效应导致探测失败。
4. 角度是影响探测范围的核心因素。被测物体相对于传感器波束的摆放角度决定了有效探测视角。角度越大,回波信号越弱,有效视角越小,直至完全无法探测。这限制了雷达对非正对物体的识别能力。
5. 宽度测量存在固有的系统误差。由于超声波波束的物理特性、边缘效应以及可能的多路径干涉,对物体宽度的测量易产生偏差,且在本实验条件下表现为测量值普遍大于实际值的系统误差。提高宽度测量精度需要更复杂的信号处理算法和更高性能的硬件。
4.2 不足与展望
本研究作为一项探索性实验,存在一些可改进之处。例如,环境温湿度未进行严格控制,声速取值存在潜在误差;舵机的旋转精度和雷达的整体机械稳定性有待进一步提升;数据样本量可以进一步增加以提高统计显著性。展望未来,超声波雷达技术正朝着微型化、智能化、高精度和低成本的方向不断发展。针对本研究的发现,未来的工作可以:
• 算法优化:研究基于模型的误差补偿算法,对温度、角度等因素进行软件补偿,以提升测量精度。
• 传感器融合:探索将超声波雷达与红外、激光或视觉传感器相结合,利用多传感器信息互补,克服单一传感器的局限性,尤其是在复杂材质和角度下的识别问题。
• 应用拓展:将研究成果应用于具体的机器人避障、智能车位检测或液体流量监控等实际场景中,检验其有效性并推动技术转化。
诚如《礼记》所言:“苟日新,日日新,又日新。”科学探索永无止境。本次探究不仅深化了我们对超声波技术的理解,更点燃了我们持续创新的科研热情。
超声波雷达作为感知世界的“慧眼”,必将在未来的智能世界中扮演愈发重要的角色。


