基于Arduino开发板的自动驾驶技术研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于Arduino开发板的自动驾驶技术研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
|
孙乐瑶 |
女 |
高一15 |
组长 |
||
王若曦 |
女 |
高一15 |
组员 |
||
孙雅泽 |
女 |
高一15 |
组员 |
||
李珍早 |
女 |
高一15 |
组员 |
||
陈姝璇 |
女 |
高一15 |
组员 |
||
指导教师 |
孙尧、李嘉珞 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 1. 以Arduino开发板为核心,搭建基础自动驾驶实验平台,完成自动循迹、传感器避障、人体追踪三大课题的设计与实现,验证入门级自动驾驶功能的可行性。 2. 对比反射式光电、超声波、红外等传感器在不同场景下的应用效果,明确其性能差异与适配环境,深化对自动驾驶感知系统的认知。 3. 掌握基础电路搭建、Arduino程序编写、实验数据记录与分析方法,理解自动驾驶“感知-决策-控制”的完整流程。 4. 形成一套适合高中生的、可复现的自动驾驶探究方案,为同龄人开展类似项目提供参考。 主要内容: 实验一、利用反射式光电传感器设计一个可以自行在划定跑道上行驶的智能小车; 实验二、探究距离传感器类型对自动驾驶小车防碰撞效果的影响; 实验三、利用旧手机和已制作的小车制作一个可跟踪人行驶的智能小车。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月19日 启动会 1. 查收科学盒子和海报 2. 录制开箱视频 3. 会后进群 二、8月26日 科学第一课 1. 了解项目细节、时间安排、答疑规则 2. 试用在线学习平台 3. 学习“探究性学习导论”和“合作讨论”课程 三、8月27日-9月中旬 课题探究 1. 观看平台内教学视频 2. 利用科学盒子完成课题探究实验,提交节点任务 四、9月中旬 中期交流 1. 课题进展汇报交流(PPT) 2. 数据分析指导 3. 成果制作指导 4. 科研故事素材整理 五、9月下旬 结题准备 1. 线上成果指导 2. 完成PPT、海报和论文成果制作,修改及推选 六、9月下旬 1. 海报线上评选 2. 课题ppt 预答辩 (PPT) 七、10月初 闭幕式,汇报答辩与评选颁奖 |
||||
成 果 形 式 |
PPT、论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于Arduino开发板的自动驾驶技术研究 |
编号: |
||
活动时间:9月18日 |
第 3 次 |
活动地点:户外 |
|
指导教师:孙尧、李嘉珞 |
班级:高一15班 |
||
参加活动成员: 孙乐瑶、王若曦、孙雅泽、李珍早、陈姝璇 |
|||
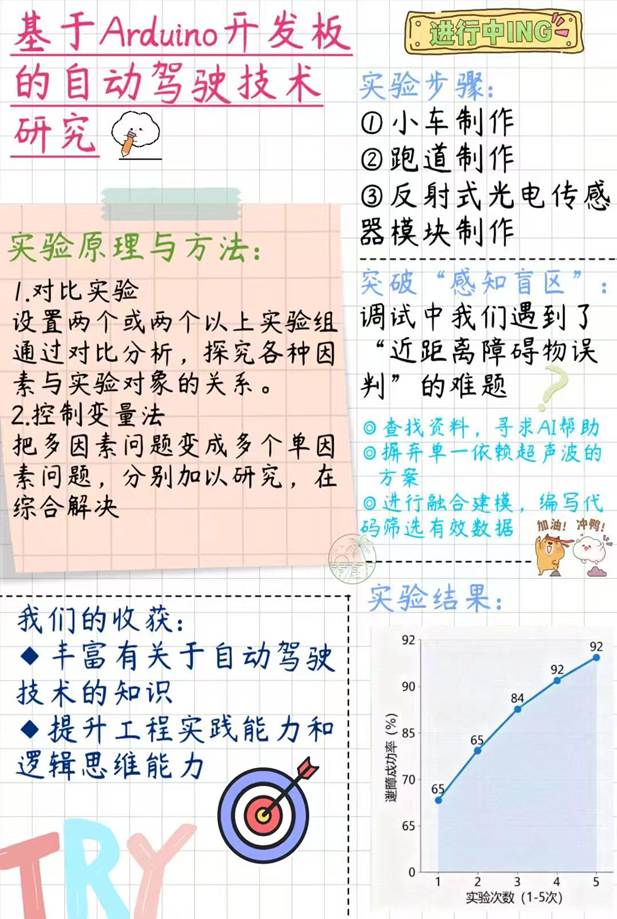
活动内容: 1)目的(解决什么问题): 突破自动驾驶的“知识盲区” 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ①团体试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划) ①结论:成功过滤掉光影干扰带来的无效信号。 ②解决了大家一直疑惑的问题:红外传感器检测到无实体障碍物时,自动降低超声波信号的误判权重。 ③完成了预定目标和计划。 记录者: 孙乐瑶 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:基于Arduino开发板的自动驾驶技术研究 |
编号: |
||||
课题组成员 |
组长:孙乐瑶 |
组员:王若曦、孙雅泽、李珍早、陈姝璇 |
|||
指导教师:孙尧、李嘉珞 |
报告执笔人: 孙乐瑶 |
完成时间:10月初 |
|||
主导课程:自动驾驶 |
相关课程:物理学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:通过课题一实现了白底黑边跑道的自动循迹行驶,通过程序迭代优化提升了行驶稳定性与效率; 实验二结果:课题二明确了超声波与红外传感器的避障适配性差异,传感器数据融合方案有效解决了环境干扰问题;。 实验三结果:通过课题三依托Openbot软件与手机联动,达成了人体追踪功能,置信度参数调整可有效优化追踪精度。 整体实验印证了Arduino开发板在硬件控制、传感器数据处理及程序执行上的可靠性,为入门级自动驾驶技术实践提供了有效方案。 |
|||||
参考书目及资料:《Arduino开发板应用实战》[M]:支撑实验中Arduino UNO R3开发板的硬件操作、电路连接及程序设计核心技术。2. 《自动驾驶技术基础与实验教程》[M]:涵盖自动驾驶历史、感知-决策-控制三大系统原理,匹配实验设计的技术背景。 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( 1)份 调查表( )份 测量数据记录(1 )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4、基于Arduino开发板的自动驾驶技术研究
学校:徐州市第一中学
学生姓名:高一15班 孙乐瑶 王若曦 孙雅泽 李珍早 陈姝璇
指导教师:孙尧、李嘉珞
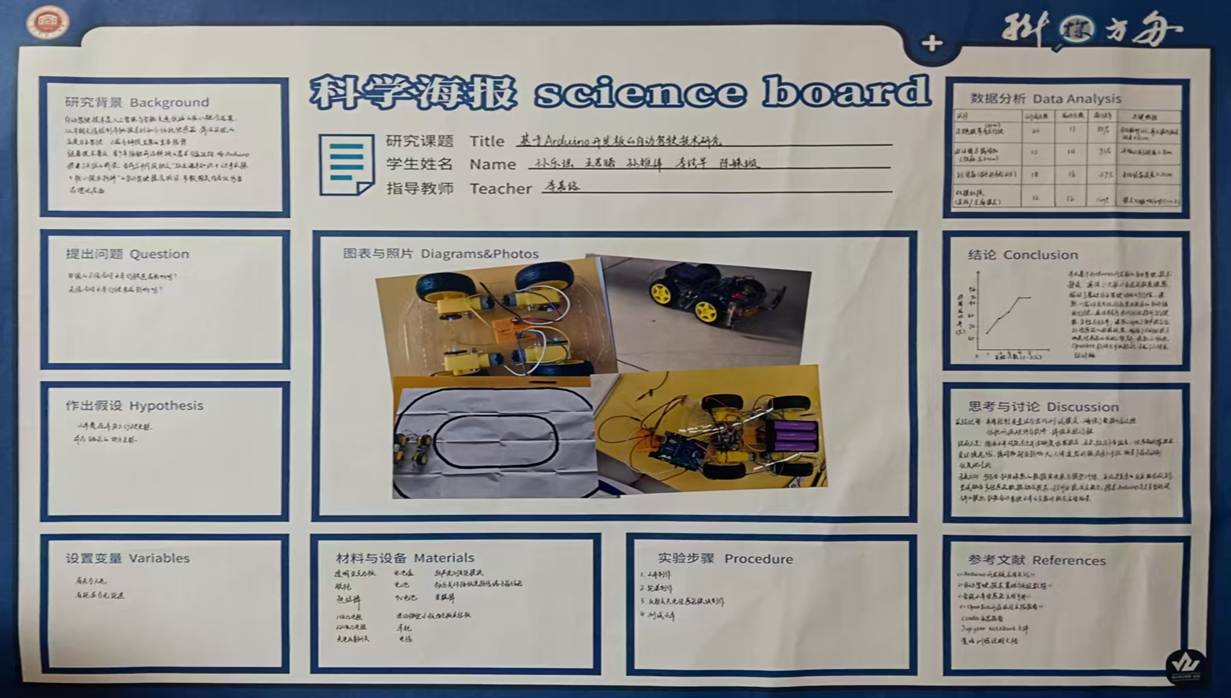
【摘要】本研究聚焦高中科技创新教育需求,以Arduino开发板为核心搭建基础自动驾驶实验平台,围绕自动循迹、传感器避障、人体追踪三大课题展开探究。通过控制变量法与对比实验,系统分析反射式光电、超声波、红外等传感器的性能差异与适配场景,验证了入门级自动驾驶功能的可行性。研究形成了一套可复现的高中阶段自动驾驶探究方案,将复杂的"感知-决策-控制"技术体系转化为具象化实践,为高中科技课程提供了兼具理论价值与实操性的教学资源,对提升学生工程实践能力、激发前沿科技兴趣具有重要意义。
【关键词】Arduino开发板;自动驾驶;传感器应用;高中科技创新教育;实践探究
一、研究背景
自动驾驶技术作为人工智能与智能交通领域的核心融合成果,历经从早期无线控制到依托传感器与算法的高度自主驾驶阶段,已成为全球科技发展的重要趋势。随着技术普及,青少年接触和探究前沿科技的需求日益迫切,但当前高中阶段相关教育存在明显短板——缺乏"贴近课本知识+动手实操+核心技术拆解"的一体化探究项目,多数内容仅停留在理论层面,难以实现知识与实践的深度融合。
Arduino开发板作为开源硬件平台,具有低成本、易操作、扩展性强的显著优势,恰好为高中生搭建了连接理论与实践的桥梁。本研究依托"科学盒子"课程框架,聚焦自动驾驶感知、决策、控制三大核心模块,通过阶梯式实验设计,让学生在具象化实践中理解技术底层逻辑,填补高中阶段自动驾驶入门探究的空白,助力科技创新教育落地实施。
二、实验材料
本实验所需核心材料包括硬件与工具两类,具体如下图:

三、研究过程
课题一:利用反射式光电传感器设计一款自动行驶的小车
具体步骤:
1、制作小车
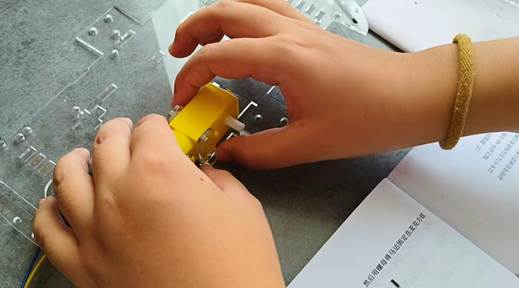
1.1处理公对公杜邦线:剪去一端的黑色塑料头,在距离断口约2cm处轻轻划开线皮(避免损伤内部铜线),裸露铜线后弯曲成型。
1.2 电机连接:将处理好的杜邦线套住马达金属片的孔,确保导线与金属片充分接触,通过焊锡固定增强稳定性。
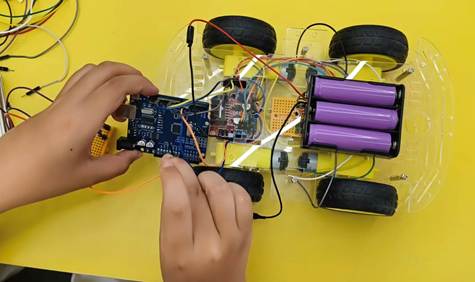
1.3电路搭建:在亚克力板上完成Arduino开发板、传感器、电机、电源的电路连接,遵循电路安全规范,确保接线准确无误。
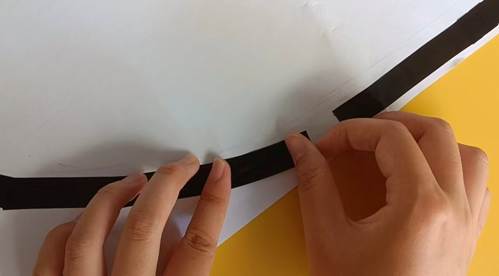
2、跑道制作
2.1将制作好的小车放置在A0白纸上,以小车不压线通过为基准,用铅笔勾勒跑道轮廓,选取参考宽度22cm进行制作。
2.2沿铅笔轮廓粘贴黑胶带,形成白底黑边的循迹跑道,确保胶带粘贴平整、边界清晰,避免影响传感器识别。
3、反射式光电传感器的制作
3.1仔细观察光电传感器缺角的部分,把反射式光电传感器的针脚向上摆放。俯视观察, 确定传感器的四个针脚序号, 并用四根公对母杜邦线连接(用热熔胶固定)。
3.2用热熔胶将压舌板粘贴成 H形结构(1.5cm*1cm 的部件用钳子折断),制作两个H形状结构;确保两个传感器离地的高度一致,随后用透明胶带分别将两个传感器固定在两个H形结构上形成可以夹在小车前段缝隙中的结构,将结构插在车头两侧,用胶塞、纸巾、热熔胶等固定,防止H形结构在车头上滑动;连接电路
3.3按照传感器 datasheet 完成反射式光电传感器的电路焊接与模块组装。将传感器模块固定在小车上,连接至Arduino开发板对应的I/O接口,通过Arduino IDE编写基础测试程序,验证传感器数据传输是否正常。
4、编程
认识并学习Arduino UNO 板的内容、编程方式,下载软件与电脑连接开始编写程序,经调试程序后开始实验。
课题二、传感器避障实验——探究距离传感器类型与环境光照对自动小车防撞效果的影响
1. 设置距离传感器类型的因变量
在小车上同时连接超声波距离传感器和红外距离传感器。用热熔胶将压舌板粘成H型,再用热熔胶将超声波距离传感器和红外距离传感器粘在小车上的日形结构上,最后将H型结构用胶塞固定在车头前端中央的缝隙处。
2. 实验具体过程
(1)安装距离传感器
在无光照直射且阴暗的屋内将车放置到平面上,在车头前方15厘米处放置障碍物(纸箱)。小车运动完成后,利用超声波距离传感器可直接测量出小车与障碍物之间的距离,实验至少进行三次并且取多次平均值。红外距离传感器同理。
(2)避障测试步骤
将场地选取在室外,把白纸铺在平整的地面,在白纸上做记号标记试验车起始的位置,在起始后50厘米处放置障碍物。打开小车电机供电,将小车放置在起始位置朝向障碍物开始碰撞实验。实验中记录了小车在前方无障碍物时是否正常行驶,小车遇到障碍物时是否正常行驶,以及停止时小车与障碍物之间的距离。
课题三:基于OpenBot软件的自动驾驶策略训练与实现
1. 数据收集
1.1 将蓝牙游戏手柄(如PS4遥控手柄)与手机连接,打开OpenBot应用程序。
1.2 在应用中选择AUTOPILOT_F网络,模式设置为CIL-Mobile-Cmd。
1.3 通过手柄遥控小车在跑道上行驶,按下手柄上的X按钮开始记录数据。
1.4 每条记录会自动保存在手机内部存储的OpenBot文件夹中,文件名为“yyyymmdd hhmmss.zip”,对应记录开始的日期和时间。
1.5 将记录的数据导出到电脑,解压后用于后续训练。
2. 策略训练
2.1 在电脑上安装conda环境,根据是否有独立GPU选择相应的命令创建OpenBot环境:
- 无GPU:
conda create -n openbot python=3.7 tensorflow=2.0.0 notebook=6.1.1 matplotlib=3.3.1 pillow=7.2.0
- 有GPU:
conda create -n openbot python=3.7 tensorflow-gpu=2.0.0 notebook=6.1.1 matplotlib=3.3.1 pillow=7.2.0
2.2 下载Jupyter Notebook文件(policy_learning.ipynb),并按照说明进行策略训练。
2.3 训练过程中,神经网络会模仿手柄控制的驾驶行为,数据量越大、驾驶行为越稳定,训练效果越好。
3. 封装程序
3.1 训练完成后,将修改后的程序重新编译为APK文件。
3.2 将APK安装到手机中,重新启动OpenBot应用即可实现自动驾驶功能。
四、结果与分析
课题一结果:在课题一的实验中,通过不断改进程序,小车可以依靠反射式光电传感器在划定轨道上行驶
表1 基于反射式光电传感器的小车行驶记录

自动循迹功能:85%的成功率表明基于反射式光电传感器的循迹方案可行,平均行驶耗时12s体现了良好的行驶效率,最大偏离距离≤8cm说明行驶稳定性较好,但仍有优化空间,主要受跑道边界清晰度影响。
课题二结果:对比了超声波距离传感器和红外距离传感器的避障效果,明确了不同环境下两类传感器的适配性差异
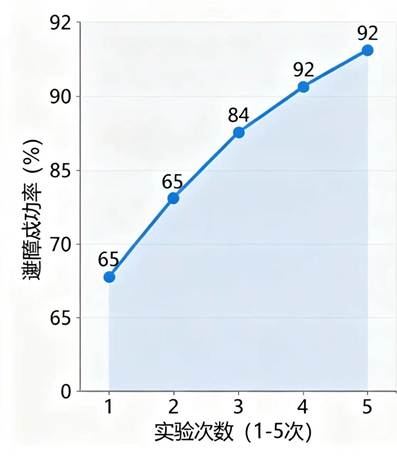
表2-1避障成功率折线图

表2-2 超声波传感器的识别距离和响应时间
课题三结果:通过收集约30分钟的手柄控制数据并进行策略训练,OpenBot小车能够在跑道上实现初步的自动驾驶功能。训练后的模型在一定程度上模仿了人类的驾驶行为,表现出较好的路径跟随能力。
表2 基于OpenBot的自动驾驶策略训练效果记录表格
数据集时长 |
训练轮次 |
自动驾驶成功率 |
备注 |
15分钟 |
10轮 |
约60% |
路径跟随不稳定,易偏离轨道 |
30分钟 |
20轮 |
约85% |
行为稳定,能够完成大部分路径 |
45分钟 |
30轮 |
约90% |
表现良好,偶尔受光线影响偏离 |
自动驾驶功能的实现依赖于数据质量与训练轮次。实验表明,收集数据越多、驾驶行为越规范,模型的策略表现越优。建议在光线稳定、跑道清晰的环境下进行数据采集和测试,以提升模型泛化能力。
五、实验结论
本次基于Arduino开发板的自动驾驶技术探究,通过三大核心实验及拓展课题,成功验证了基础自动驾驶功能的可行性。课题一实现了白底黑边跑道的自动循迹行驶,通过程序迭代优化提升了行驶稳定性与效率;课题二明确了超声波与红外传感器的避障适配性差异,传感器数据融合方案有效解决了环境干扰问题;课题三依托Openbot软件与手机联动,达成了人体追踪功能,置信度参数调整可有效优化追踪精度。整体实验印证了Arduino开发板在硬件控制、传感器数据处理及程序执行上的可靠性,为入门级自动驾驶技术实践提供了有效方案。
六、参考文献
《Arduino开发板应用实战》[M]:支撑实验中Arduino UNO R3开发板的硬件操作、电路连接及程序设计核心技术。2. 《自动驾驶技术基础与实验教程》[M]:涵盖自动驾驶历史、感知-决策-控制三大系统原理,匹配实验设计的技术背景。3. 《智能小车传感器应用手册》[M]:详解反射式光电传感器、超声波传感器、红外传感器的工作原理与调试方法,对应三大实验课题的传感器使用。4. 《OpenBot开源项目实践指南》[M]:提供手机与Arduino联动、物体追踪、自动驾驶策略训练的实操流程,支撑拓展课题。