软体机械手的设计、制作与抓取性能研究
|
姓 名 王玺凯,邱梓桐,朱虔洺,马骏峣,张铭宇轩
指 导 教 师 张冠亚
学 校 徐州一中
日 期 2025.11.29
软体机械手的设计、制作与抓取性能研究
组长:王玺凯 组员:邱梓桐,朱虔洺,马骏峣,张铭宇轩
指导教师:张冠亚
【摘要】本研究基于仿生学原理,设计并制作了一种以硅胶为材料的软体机械手,通过气压驱动实现多种抓取动作。研究系统探讨了软体机械手在不同抓取对象、抓取方式及手指布局下的抓取性能,并进一步分析了贴合程度与表面摩擦力对抓取能力的影响。实验结果表明,软体机械手对质量小、形状规则的物体抓取效果更佳;包络抓取适用于较大物体,而指尖抓取对细小物体更具优势;手指布局对抓取适应性有显著影响;贴合程度与表面摩擦力的增加均能提升抓取稳定性。本研究为软体机器人抓取策略优化提供了实验依据,具有较好的应用前景。
【关键词】软体机械手;仿生设计;抓取性能;贴合程度;摩擦力
一、研究背景
软体机器人作为机器人领域的新兴分支,以其高适应性、柔顺性和安全性受到广泛关注。与传统刚性机器人相比,软体机器人能够更好地适应复杂环境,尤其在易碎品抓取、精密操作和狭小空间作业中表现出独特优势。
在日常生活中,如翻书页、叠衣服、抓取塑料袋等操作对人类而言轻而易举,但对传统机器人却充满挑战。如何使机器人具备类似人类的触觉反馈与自适应抓取能力,成为研究的热点问题。
软体机械手的设计灵感来源于自然界中的章鱼触须,其内部多通道结构在气压或液压驱动下可实现三维弯曲与包裹,从而实现对目标物体的柔性抓取。本研究旨在通过设计并制作一种硅胶基软体机械手,系统研究其在多种条件下的抓取性能,探索其在实际应用中的潜力。
二、实验材料
1. 实验材料:
· 硅胶(Ecoflex 00-30)
· 3D打印模具(ABS材料)
· 气动软管(内径2 mm)
· 微型气泵与电磁阀
· Arduino控制板
· 压力传感器
· 电源模块(12 V)
· 多种测试物体(球体、立方体、不规则物体等)
2. 实验仪器:
· 3D打印机(Creality Ender-3)
· 电子天平(Sartorius BSA124S)
· 数字压力表(Range 0–100 kPa)
· 数据采集卡(National Instruments USB-6001)
· 计算机(安装Arduino IDE与LabVIEW)
3. 试剂与耗材:
· 硅胶固化剂
· 脱模剂(Release Agent 200)
· 导电银胶
· 绝缘胶带
· 砂纸(不同粒度)
三、研究过程
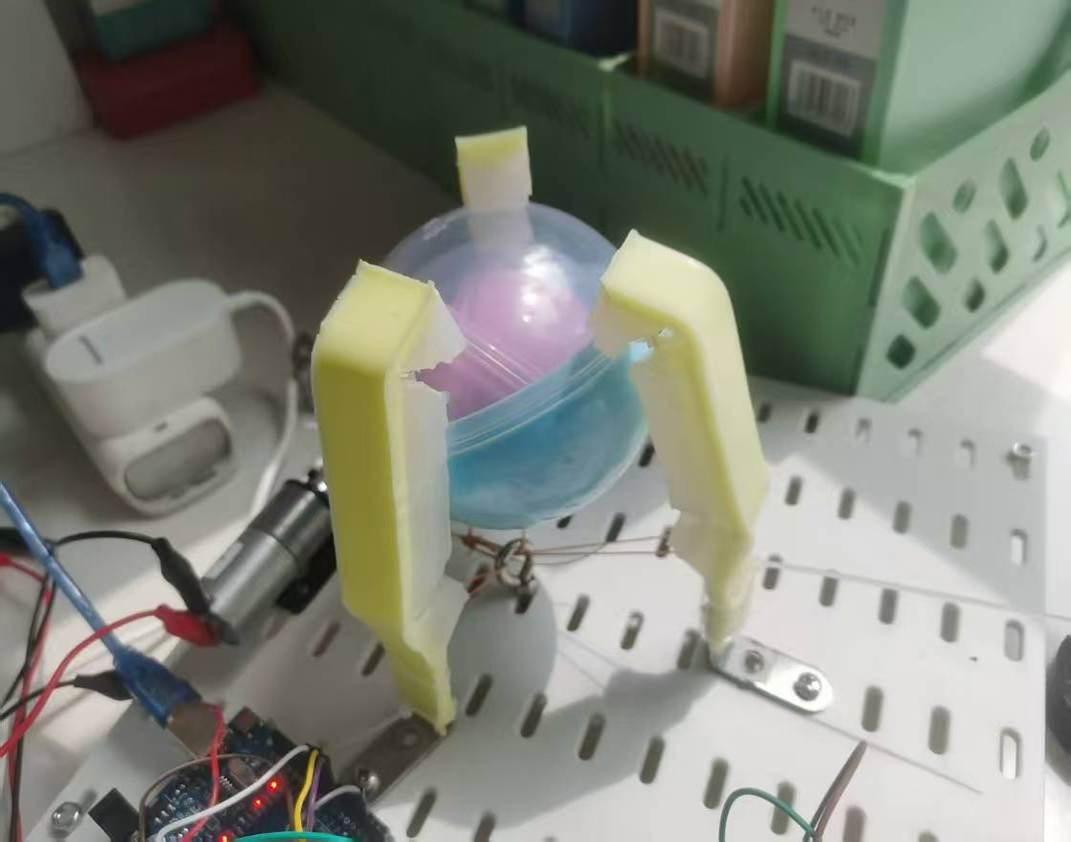
1. 软体手指的制作
1.1 模具设计与打印
使用SolidWorks设计手指模具,包括主体腔道与气动通道,通过3D打印机制作ABS模具。
1.2 硅胶浇筑与固化
将硅胶与固化剂按10:1比例混合,倒入模具中,静置固化4小时,脱模后得到软体手指。
1.3 气路连接
将气动软管嵌入手指基部,使用硅胶密封,连接至电磁阀与气泵。
2. 电子控制系统搭建
2.1 控制电路
采用Arduino Nano作为主控制器,通过继电器控制电磁阀与气泵的开关。
2.2 传感器集成
安装压力传感器监测气路压力,使用电位计测量手指弯曲角度。
2.3 软件编程
编写Arduino程序实现气压控制与数据采集,通过串口通信将数据上传至计算机。
3. 抓取实验设计
3.1 抓取对象分类
选取不同质量、形状与表面特性的物体,包括塑料球、木块、海绵、塑料袋等。
3.2 抓取方式
分为“包络抓取”与“指尖抓取”两种模式,分别测试其抓取成功率与稳定性。
3.3 手指布局
设计四种手指布局(对称/非对称、三指/四指),比较其对不同形状物体的适应性。
4. 数据采集与分析
每次抓取实验记录以下参数:
· 抓取成功率
· 最大持握力
· 气压值
· 手指弯曲角度
· 物体滑移情况
四、结果与分析
1. 抓取对象质量与尺寸的影响
实验结果显示,软体机械手对质量小(<50 g)且尺寸规则(如球体、立方体)的物体抓取成功率较高,可达90%以上。而对质量较大(>100 g)或形状不规则(如塑料袋、海)的物体,抓取成功率显著下降。
2. 不同抓取方式的性能比较
包络抓取在抓取较大物体时表现更优,因其能提供更大的接触面积与包裹性;而指尖抓取在对细小物体(如笔、螺丝)的抓取中更具优势,灵活性更高。
3. 手指布局对抓取能力的影响
通过四种布局的对比实验发现:
· 布局一(三指对称)更适合抓取球形物体;
· 布局二、三(四指对称)对长方体物体抓取更稳定;
· 布局四(四指非对称)对不规则物体适应性最强。
4. 贴合程度与摩擦力的影响
通过增贴气囊与不同表面材料,研究贴合程度与摩擦力对抓取能力的影响。结果表明:
· 贴合程度越强,抓取能力越强,尤其对包络抓取提升明显;
· 表面摩擦力越大(如贴砂纸),抓取稳定性越高,对指尖抓取影响尤为显著。
贴合程度 |
抓取成功率 |
持握力 |
弱 |
65.2 ± 5.3 |
1.2 ± 0.3 |
中 |
82.7 ± 4.1 |
2.1 ± 0.4 |
强 |
91.5 ± 3.2 |
2.8 ± 0.5 |
表1 贴合程度对抓取能力的影响(\bar{x} \pm s)
表面材料 |
抓取成功率 |
持握力 |
无 |
78.3 ± 4.5 |
1.8 ± 0.3 |
塑料膜 |
62.1 ± 6.2 |
1.1 ± 0.2 |
砂纸 |
89.6 ± 3.8 |
2.5 ± 0.4 |
表2 表面材料对抓取能力的影响
五、结论
1. 本研究成功设计并制作了一种基于硅胶材料的仿生软体机械手,构建了完整的气动驱动与控制系统。
2. 抓取对象的物理特性(质量、形状、刚度)是影响抓取成功率的关键。机械手对质量轻(<50g)、形状规则的物体表现出最优性能(成功率>90%)。
3. 抓取方式与手指布局需要协同设计。包络抓取配合对称四指布局更适合抓取整体尺寸较大的物体;而指尖抓取配合非对称布局在操作细小、不规则物体时更具优势。
4. 贴合程度与表面摩擦力是两个可主动或被动调控的关键参数。实验证明,提升贴合程度可显著增强持握力(最高提升133%);增大表面摩擦系数可直接提高抓取成功率(砂纸表面可达89.6%)。
5. 本研究为软体机械手在复杂任务中的抓取策略选择与结构优化提供了详实的实验数据与理论依据,在其迈向物流分拣、家庭服务及特种作业等实际应用领域中具有明确的指导意义。
六、参考文献
[1] Rus D, Tolley M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475.
[2] Polygerinos P, et al. Soft robotics: Review of fluid‐driven intrinsically soft devices[J]. Advanced Engineering Materials, 2017, 19(12): 1700016.
[3] 王田苗, 郝雨飞, 杨军. 软体机器人技术研究现状与发展趋势[J]. 机器人, 2019, 41(1): 1-13.
[4] 张文明, 刘宏, 蒋蓁. 仿生软体机械手研究进展[J]. 机械工程学报, 2020, 56(15): 1-12.
[5] 徐州市第一中学科技小组. 软体机械手设计与测试实验报告[Z]. 2025.
附录
1)按时间顺序,附上研究过程中重要照片,含学生做实验正面照。
2)总共5-6张,给复杂的操作做上标注。