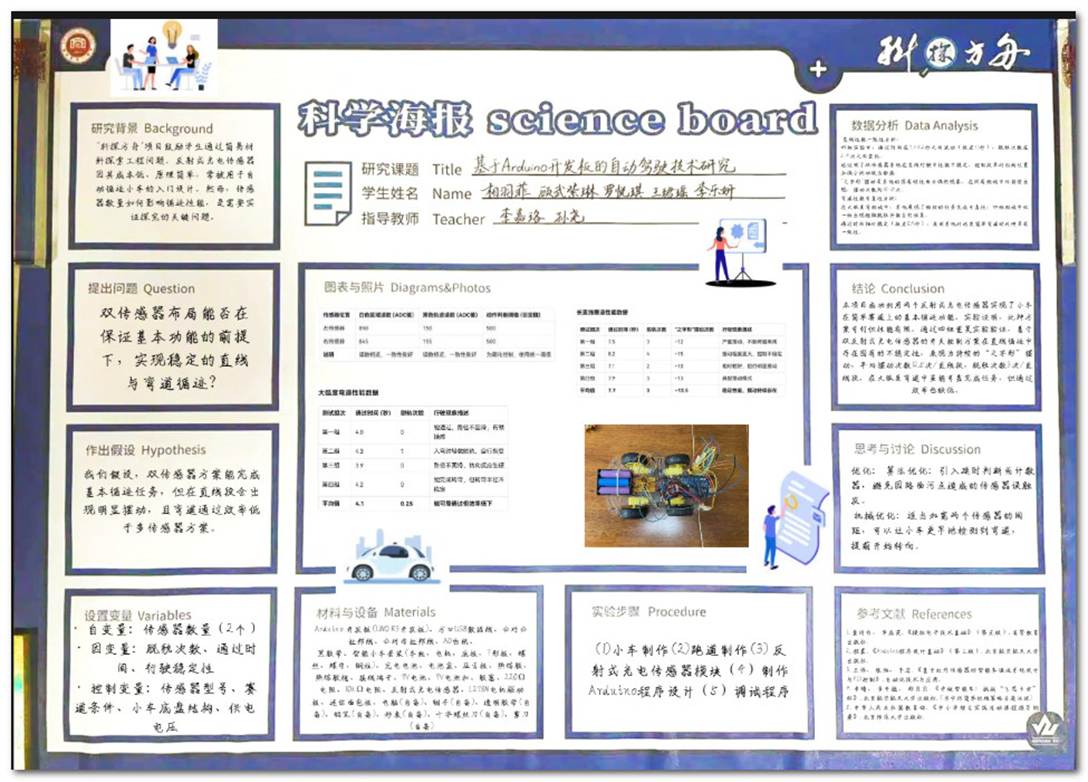
基于Arduino开发板的自动驾驶技术研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
基于Arduino开发板的自动驾驶技术研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
相羽菲 |
女 |
高一15 |
组长 |
zp05g06n01 |
|
顾武紫琳 |
女 |
高一15 |
组员 |
||
罗悦琪 |
女 |
高一15 |
组员 |
||
王珺瑶 |
女 |
高一15 |
组员 |
||
李乐妍 |
女 |
高一15 |
组员 |
||
指导教师 |
李嘉珞 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 1. 理解反射式光电传感器的工作原理及其在环境感知中的应用 2. 掌握基本的自动控制算法(如PID控制或简单的阈值控制) 3. 培养硬件搭建、软件编程、数据采集和实验分析的综合科学探究能力 主要内容: 该课题基于Arduino和反射式光电传感器,设计制作了一款自动驾驶循迹小车。通过搭建硬件并编写控制程序,实现了小车沿黑色跑道自动行驶的功能。实验重点分析了开关控制带来的固有“之字形”摆动问题,验证了方案的可行性,并提出了算法与机械方面的优化方向。 |
||||
研 究 假 设 |
基于双反射式光电传感器(TCRT5000)的开关量控制方案,能够使Arduino小车实现基本的自主循迹功能;但由于其“有偏即全速修正”的二值化控制特性,该系统在直道路段必然会产生持续的“之字形”来回摆动,导致行驶效率低下;而在大弧度弯道路段,由于传感器能持续检测到偏差,其通过稳定性反而优于直线路段。 |
||||
研 究 方 法 |
文献研究法、实验法、观察法、定量分析法、归纳总结法 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月24日-8月26日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月27日-11月8日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、11月8日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、11月8日-11月22日 成果制作和修改 六、11月22日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、12月8日 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
开箱视频,“我的科研故事”视频、科技论文、通讯稿、PPT |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:基于Arduino开发板的自动驾驶技术研究 |
编号:zp05g06n01 |
||
活动时间:8月27日 |
第 2 次 |
活动地点:书城 |
|
指导教师:李嘉珞 |
班级:高一15班 |
||
参加活动成员: |
|||
活动内容: 1)目的(解决什么问题): 通过直线与大弧度弯道两种赛道设计,测试小车在循迹过程中的行驶稳定性、通过时间及脱轨情况,评估其路径跟踪能力;观察并记录小车在循迹过程中出现的“之字形”摆动现象,探究双传感器开关控制方案对循迹精度的影响及其固有局限性。 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ① 小组成员协同制作小车、跑道和反射式传感器模块 ② 设计Arduino程序 ③ 进行实验,观察并记录实验现象 ④ 查阅资料,得出结论 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ① 结论:本项目成功利用两个反射式光电传感器实现了小车在简单赛道上的基本循迹功能。实验证明,此种方案可行但性能有限。通过四组重复实验验证,基于双反射式光电传感器的开关控制方案在直线循迹中存在固有的不稳定性,表现为持续的“之字形”摆动,平均摆动次数12.5次/直线段,脱轨次数3次/直线段。在大弧度弯道中虽能可靠完成任务,但通过效率也较低。 ② 优化: 算法优化:引入延时判断或计数器,避免因路面污点造成的传感器误触发。 机械优化:适当加宽两个传感器的间距,可以让小车更早地检测到弯道, 提前开始转向。 记录者: 相羽菲 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:基于Arduino开发板的自动驾驶技术研究 |
编号:zp05g06n01 |
||||
课题组成员 |
组长:相羽菲 |
组员:顾武紫琳、罗悦琪、王珺瑶、李乐妍 |
|||
指导教师:李嘉珞 |
报告执笔人: 相羽菲 |
完成时间:11月22日 |
|||
主导课程:信息学 |
相关课程:信息学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 实验成功,符合预定推测。 2) 课题实际取得的成果: 一、硬件成果:成功搭建自动驾驶小车平台 课题组成功完成了基于Arduino UNO R3开发板和反射式光电传感器(TCRT5000)的智能小车硬件搭建。小组成员掌握了从马达接线、底盘组装到传感器模块制作的完整工艺流程,自主设计并制作了H形传感器固定结构,确保两个传感器能够稳定安装于车头且离地高度一致,构建了一个功能完整、结构可靠的硬件实验平台。 二、软件成果:实现基本的循迹控制程序 通过Arduino IDE环境编写控制程序,成功实现了基于双传感器开关量控制的循迹算法。程序能够根据两个传感器检测到的黑白路面信号组合,判断小车相对于黑色轨迹线的位置,并通过驱动板分别控制两个车轮的转速与转向,使小车具备基本的自主循迹行驶能力。 三、实验数据成果:验证循迹性能并揭示规律 通过四组重复实验采集了系统的性能数据: 1. 直线赛道测试:小车通过时间在7.1-8.2秒之间波动(极差1.1秒),脱轨次数为2-4次。实验证实了“之字形”摆动是系统的固有特性,直线段平均摆动次数达12.5次。 2.弯道性能测试:在大弧度弯道中,四组测试仅一组出现轻微脱轨并能自行恢复,通过时间极差仅0.4秒,表明系统在简单弯道上具有较好的可靠性和稳定性。
四、理论成果:分析系统特性并提出优化方案 基于实验数据,课题组得出明确结论:双反射式光电传感器的开关控制方案可行但存在固有局限性——直线循迹时产生持续摆动导致效率低下,而弯道通过性相对稳定。针对这一问题,提出了算法优化(引入延时判断避免误触发)和机械优化(加宽传感器间距以提前检测弯道)两条改进路径,为后续研究提供了方向参考。 综上所述,本课题成功实现了基于Arduino与光电传感器的小车循迹功能,通过量化测试验证了开关控制方案的性能特点,达到了预期的探究目的。 |
|||||
参考书目及资料: [1] 童诗白, 华成英. 模拟电子技术基础(第五版)[M]. 北京: 高等教育出版社. [2] 程晨. Arduino程序设计基础(第三版)[M]. 北京: 北京航空航天大学出版社. [3] 王伟, 张旭, 李岩. 基于红外传感器的智能车循迹系统设计与PID控制[J]. 自动化技术与应用. [4] 卓晴, 黄开胜, 邵贝贝. 学做智能车:挑战“飞思卡尔”杯[M]. 北京: 北京航空航天大学出版社. [5] 中华人民共和国教育部. 中小学综合实践活动课程指导纲要[Z]. |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||||
4. 基于Arduino开发板的自动驾驶技术研究
徐州市第一中学高一15班 相羽菲、顾武紫琳、罗悦琪、王珺瑶、李乐妍
【摘要】本研究基于Arduino开发板与反射式光电传感器TCRT5000,设计并实现了一套自动驾驶小车的循迹系统。通过搭建硬件平台、制作测试跑道并编写控制程序,重点探究了该双传感器系统在直线与弯道场景下的循迹性能。实验结果表明,该系统能够完成基本的循迹任务,但在直线行驶中存在明显的“之字形”摆动现象,稳定性有待提升(平均摆动次数12.5次/直线段,脱轨次数3次/直线段);而在大弧度弯道中表现出较好的任务可靠性。本研究为理解简易自动驾驶系统的控制原理与性能局限性提供了实践依据,并提出了可行的优化方向。
【关键词】Arduino;自动驾驶;反射式光电传感器;循迹控制;性能分析
一、研究背景
人工智能技术的飞跃推动自动驾驶技术进入高速发展期。回溯历史,在人工智能时代之前,无人驾驶技术曾经历无明确方向、无线电控制、基于计算机技术等探索阶段。直至20世纪90年代,依托人工神经网络(ANN)等关键技术,无人驾驶进入了全新的快速发展轨道。本研究旨在将先进的自动驾驶概念转化为可触可感的实践项目,通过基于Arduino开发板和反射式光电传感器的智能小车模型,降低技术门槛,深化对环境感知、决策控制等核心环节的理解,并培养综合的科学探究与工程实践能力。
二、实验材料
1. 核心控制器:Arduino (UNO R3)开发板。
2. 感知模块:反射式光电传感器。
3. 动力与执行机构:智能小车套装(含直流电机、车轮、亚克力底板等)、L298N电机驱动板。
4. 电源模块:充电电池、电池盒、9V电池及电池扣。
5. 连接与辅助材料:各类杜邦线(公对公、公对母)、迷你面包板、220Ω与10kΩ电阻、压舌板、A0白纸、黑胶带(宽1.8cm)。
6. 工具与耗材:热熔胶枪、螺丝刀、剪刀、铅笔、秒表等。
三、研究过程
本研究遵循“硬件搭建-环境构建-软件开发-测试验证”的流程展开
1. 小车制作:根据设计图纸,完成小车底盘的机械装配,包括电机固定、车轮安装以及整体结构加固。
2. 跑道制作:在A0白纸上以小车宽度为参考(约22cm),用铅笔设计跑道轮廓,并使用黑胶带粘贴出黑色轨迹线。
3. 反射式传感器模块制作:识别反射式光电传感器针脚并正确接线,利用压舌板制作可调节的传感器支架,将其固定于小车前端,确保两个传感器离地高度一致。
4. Arduino程序设计:编写基于阈值判断的控制算法,实时读取两个传感器的状态(遇到白线输出低电平,遇到黑线输出高电平),并根据状态组合决策小车的运动方向(直行、左转、右转)。
四、结果与分析
为定量评估自动驾驶小车的循迹性能,本研究进行了传感器标定以及直线与弯道循迹测试。
1. 传感器标定
首先对左右两个反射式光电传感器进行了标定,以确定其区分黑白颜色的可靠阈值。测量数据表明,传感器性能一致性好,为简化控制,将动作判断阈值统一设定为500(ADC值),具体数据如表1所示。

表1:反射式光电传感器标定数据
2. 直线赛道循迹性能分析
在直线赛道上进行了四组重复测试,重点关注通过时间、脱轨次数和“之字形”摆动次数。测试结果(表2)显示,小车在直线行驶中稳定性较差。
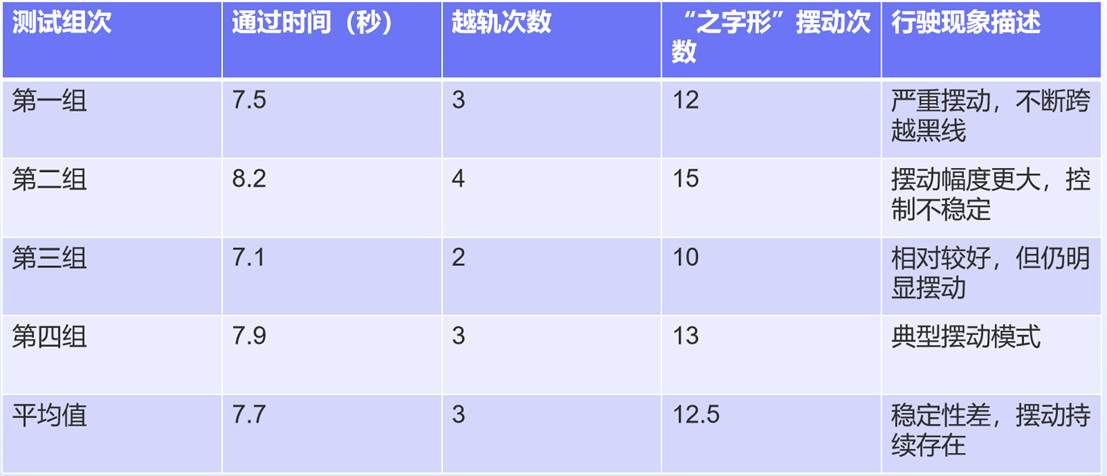
表2:直线赛道循迹性能测试数据
深度分析:“之字形”摆动是双传感器开关控制方案的固有缺陷。小车在直线上无法感知微小偏移,只有当车体偏移到一侧传感器完全压到黑线时,才触发全功率转向修正。这种过激的修正导致小车冲过中线,进而触发另一侧传感器,引发反向全功率转向,形成持续、低效的摆动。四组实验数据的一致性(通过时间极差1.1秒,脱轨次数2-4次)证明了该问题的系统性而非偶然性。
3. 大弧度弯道循迹性能分析
在大弧度弯道上的测试结果(表3)表明,系统在完成弯道任务方面具有较高的可靠性。
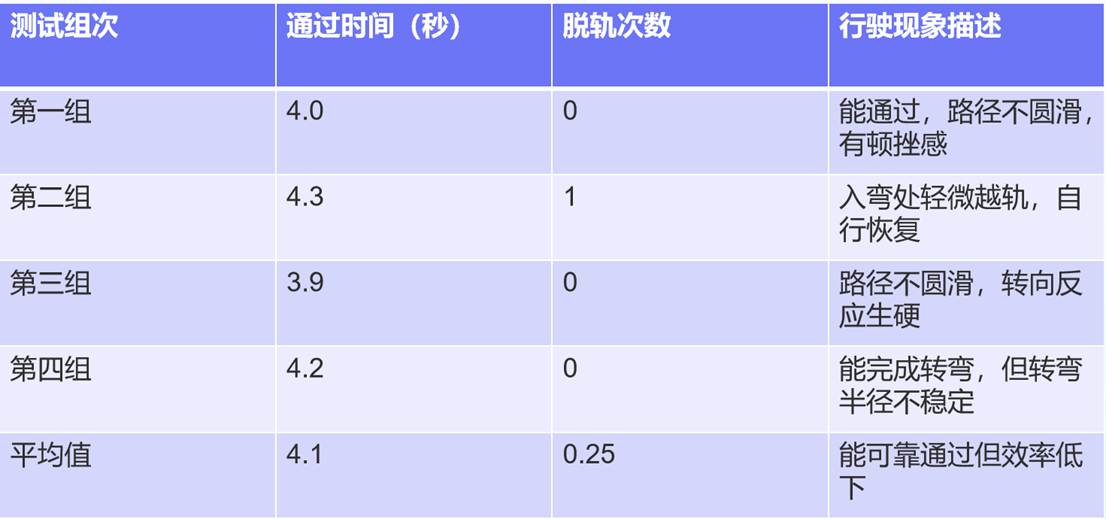
表3:大弧度弯道循迹性能测试数据
深度分析:在弯道中,由于黑线轨迹连续变化,传感器能够持续检测到信号,使小车得以沿着轨迹完成转弯。然而,简单的开关控制导致转向动作生硬,转弯路径不圆滑,通过效率较低。尽管如此,极低的平均脱轨次数(0.25次)证明了系统对于此类简单弯道具有基本任务完成能力。
五、结论
本研究成功构建了一套基于Arduino和双反射式光电传感器的自动驾驶小车循迹系统。实验验证了该方案的基本可行性,同时揭示了其核心局限性:在直线循迹中,由于控制算法的简单性,系统存在固有的不稳定性,表现为持续的“之字形”摆动;大弧度弯道中,系统表现出可靠但效率不高的通过能力;仅适用于简单赛道,缺乏复杂路径适应能力。
优化建议:
算法优化:引入简单的延时判断逻辑或计数器,可有效滤除因路面污点造成的传感器误触发,提高稳定性。未来可探索PID(比例-积分-微分)控制算法,实现更平滑、精准的转向控制。
机械优化:适当加宽两个传感器之间的间距,可以使小车更早地预判弯道变化,从而提前开始转向,改善弯道通过性能。
六、参考文献
[1] 童诗白, 华成英. 模拟电子技术基础(第五版)[M]. 北京: 高等教育出版社.
[2] 程晨. Arduino程序设计基础(第三版)[M]. 北京: 北京航空航天大学出版社.
[3] 王伟, 张旭, 李岩. 基于红外传感器的智能车循迹系统设计与PID控制[J]. 自动化技术与应用.
[4] 卓晴, 黄开胜, 邵贝贝. 学做智能车:挑战“飞思卡尔”杯[M]. 北京: 北京航空航天大学出版社.
[5] 中华人民共和国教育部. 中小学综合实践活动课程指导纲要[Z].
附录
小车制作拼装


跑道制作


反射式光电传感器模块制作
Arduino程序设计
科学海报
