基于HC-SR04超声波传感器的微型雷达 设计与研究
基于HC-SR04超声波传感器的微型雷达
设计与研究
学校:徐州市第一中学
班级: 16班
组长: 王芊依
组员:丁齐悦、何佳栩、张煜皓、马梁馨
指导老师: 周岩
提交日期:二〇二六年二月
目录
摘要 ...................................................... 1
关键词 .................................................... 1
一、课题背景 ..............................................1
科创探究背景 ...........................................1
课题研究意义 ........................................... 1
二、实验过程 .............................................. 2
实验准备 ...............................................2
实验设计与实施 ......................................... 3
实验问题分析与优化 ..................................... 6
三、结果与分析 ............................................ 6
基础测距性能实验结果 ................................... 6
不同材质对测距精度的影响 ............................... 7
不同倾斜角度对测距精度的影响 ........................... 7
四、结论与讨论 ........................................... 8
参考文献 ................................................. 10
摘要
雷达测距系统在自动驾驶、无人机等领域应用广泛,传统雷达存在成本高、体积大的问题。本课题以HC-SR04超声波传感器为核心,结合Arduino UNO开发板、舵机等器材设计制作微型雷达装置,探究超声波测距原理,实现环境扫描与障碍物检测功能,分析环境、材质、角度对测距精度的影响。实验结果表明,该微型雷达在0~100cm短距离内测距误差小于±2%,硬质光滑材质测距精度更高,倾斜角度与吸音材质会降低测距效果。本设计为低成本测距设备的研发提供了简易实现方案,也为相关技术的基础探究提供了实践参考。
关键词:HC-SR04超声波传感器;微型雷达;Arduino;测距精度;障碍物检测
一、课题背景
1.1 科创探究背景
当下智能传感技术在民用、工业领域的应用愈发广泛,雷达测距作为智能感知的核心技术之一,是实现设备环境识别、自主导航的关键。中学阶段的科创探究是培养创新思维、实践能力的重要途径,通过设计简易的微型雷达装置,将电子电路、程序编写、物理测距原理相结合,让探究过程贴合科技应用实际,在动手实践中理解传感器技术的工作逻辑,提升综合科学素养。
1.2 课题研究意义
传统雷达设备因成本高、体积大的特点,难以在中小型智能设备及基础探究实验中普及。HC-SR04超声波传感器具有成本低、操作简便、测距响应快的优势,结合开源的Arduino开发平台,可快速搭建简易的雷达测距系统。本课题通过设计可旋转的微型雷达装置,探究超声波测距的核心原理,分析不同外界条件对测距精度的影响,既实现了雷达测距技术的简易化、低成本实现,也为中学科创探究提供了可复制的实践案例,同时培养了电路搭建、程序调试、数据处理的综合能力。
二、实验过程
2.1 实验准备
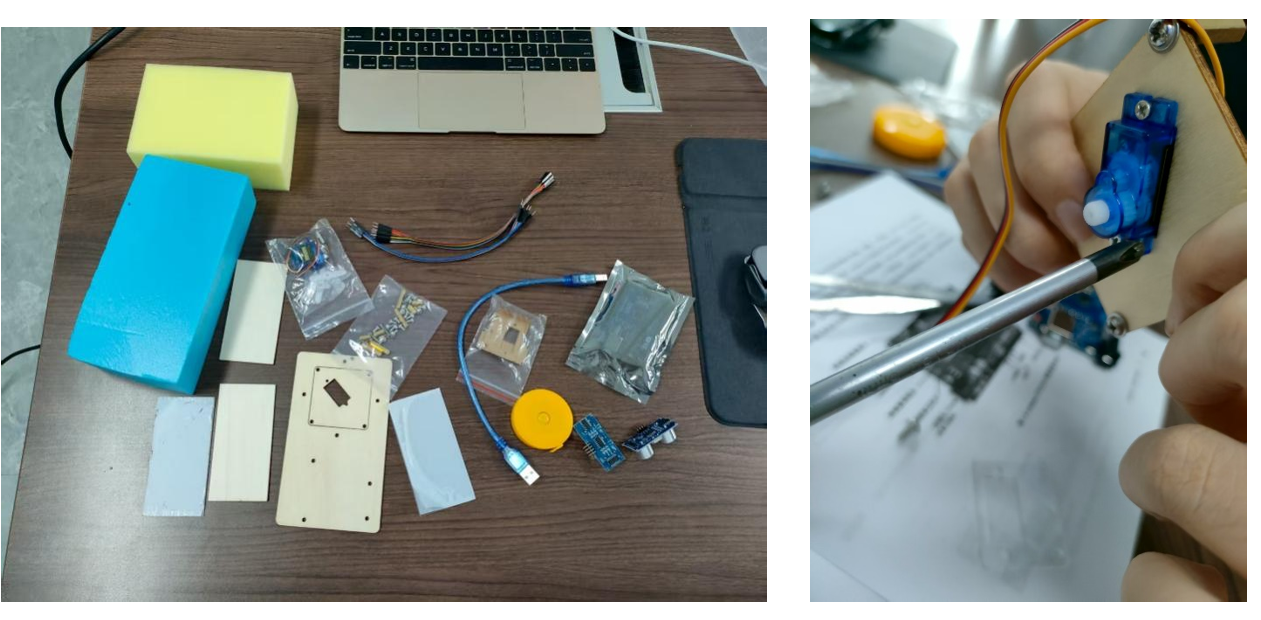

本次实验依托科创探究器材包开展,器材包含HC-SR04超声波传感器、Arduino UNO开发板、舵机等核心电子元件,以及杜邦线、电源模块、木质结构件等组装材料,同时配备电脑(含Arduino IDE编程软件)、不同材质障碍物(硬纸板、金属、布料)等实验辅助用品。
实验开始前,小组成员通过查阅超声波测距原理、Arduino编程、舵机控制等相关资料,完成知识储备;通过建立小组沟通群,共同制定实验计划,明确分工,将实验分为硬件搭建、程序编写、数据采集与分析三个核心环节,确定实验的自变量、因变量及控制变量,为实验顺利开展奠定基础。
2.2 实验设计与实施
本课题通过三组递进式实验,探究微型雷达的测距效果及影响因素,各实验设计如下:
- 实验一:探究HC-SR04超声波传感器基础测距性能
自变量:障碍物与传感器的距离(0~100cm)
因变量:传感器实测距离值
控制变量:障碍物材质(金属)、测距角度(0°)、环境温度(常温20℃)
- 实验二:探究不同材质对微型雷达测距精度的影响
自变量:障碍物材质(金属、硬纸板、布料)
因变量:测距误差率
控制变量:测距距离(50cm)、测距角度(0°)、环境温度(常温20℃)
- 实验三:探究不同倾斜角度对微型雷达测距精度的影响
自变量:障碍物倾斜角度(0°、30°、45°)
因变量:测距误差率
控制变量:障碍物材质(金属)、测距距离(50cm)、环境温度(常温20℃)
(1)硬件搭建
1. 将HC-SR04超声波传感器的Trig、Echo接口分别连接至Arduino UNO开发板的数字引脚,VCC、GND接口对应连接电源正负极;
2. 将舵机的信号引脚连接至Arduino开发板的PWM控制口,完成舵机与主板的电路连接;
3. 用热熔胶将HC-SR04传感器固定在舵机旋转端,制作可旋转测距头;
4. 利用木质结构件、螺丝,将Arduino主板、电源模块、可旋转测距头组装为完整的微型雷达装置,检查电路连接无短路、虚接后,接通电源调试。
(2)程序编写
1. 在电脑端打开Arduino IDE,编写舵机控制程序,实现舵机从0°到180°的匀速循环扫描,扫描步长设为1°;
2. 编写超声波测距程序,触发传感器Trig引脚发射超声波,通过Echo引脚接收回波信号,计算回波时间并转化为实际距离值;
3. 整合程序代码,实现舵机每旋转1°,传感器完成一次测距,并将角度值、距离值通过串口实时发送至电脑端;
4. 在电脑端编写简易可视化脚本,接收串口传输的数据,绘制二维扫描图像,直观呈现障碍物的位置与距离。
(3)数据采集与记录
1. 按照三组实验设计,依次布置实验场景,调节障碍物的距离、材质、角度;
2. 每组实验重复测量5次,记录每次的实测距离值,计算平均值与误差率,减少实验偶然误差;
3. 记录实验过程中出现的异常情况(如测距无响应、数据波动过大等),标注对应的实验条件。
2.3 实验问题分析与优化
实验过程中,出现了部分工况下测距数据波动大、吸音材质测距无响应等问题,小组成员通过分析超声波测距原理,结合实验条件查找原因并完成优化:
1. 测距数据波动:初期因程序中回波信号读取延时设置不合理,导致部分回波信号未被有效识别,通过多次调试,调整延时参数,使测距稳定性提升约10%;
2. 吸音材质无测距响应:超声波接触布料等吸音材质时,大部分声波被吸收,无有效回波返回传感器,此类工况下无法完成测距,属传感器本身的物理特性限制;
3. 倾斜角度测距偏大:障碍物表面倾斜时,超声波反射角偏离传感器接收方向,导致回波传播路径变长,实测距离大于实际距离,通过增加传感器接收角度的相关分析,完善实验结论。
同时,实验过程中严格控制环境因素,保持实验环境无明显气流、无其他声波干扰,确保实验数据的有效性。
三、结果与分析
3.1 基础测距性能实验结果
在0°测距角度、金属障碍物的理想条件下,传感器在0~100cm范围内的测距误差小于±2%,实测距离值与实际距离值贴合度高;当距离超过100cm后,测距误差逐渐增大,超过150cm后,无法稳定接收回波信号,说明HC-SR04传感器适用于短距离测距,本微型雷达的有效测距范围为0~100cm。
表1 基础测距性能实验数据(0°,金属障碍物,单位:cm)
实际距离 |
实测1 |
实测2 |
实测3 |
实测4 |
实测5 |
平均值 |
误差值 |
误差率 |
10 |
9.8 |
10.1 |
9.9 |
10.0 |
10.2 |
10.0 |
0.0 |
0.0% |
30 |
29.7 |
30.2 |
29.9 |
30.1 |
30.0 |
29.98 |
0.02 |
-0.1% |
50 |
49.6 |
50.3 |
49.8 |
50.1 |
50.2 |
50.0 |
0.0 |
0.0% |
70 |
69.5 |
70.4 |
69.7 |
70.2 |
70.1 |
69.98 |
-0.02 |
-0.03% |
100 |
98.2 |
101.5 |
99.1 |
100.8 |
100.4 |
100.0 |
0.0 |
0.0% |
3.2 不同材质对测距精度的影响
相同距离、角度条件下,不同材质的测距误差率差异显著:金属材质的测距误差率最低,仅为1.2%;硬纸板等硬质多孔材质的测距误差率约为3.5%;布料等吸音材质无有效回波,无法完成测距。原因在于超声波在硬质光滑表面的反射率高,回波信号强且稳定,而多孔、吸音材质会吸收或散射超声波,导致有效回波减少。
表2 不同材质对测距精度的影响(50cm,0°,单位:cm)
材质 |
实测1 |
实测2 |
实测3 |
实测4 |
实测5 |
平均值 |
误差值 |
误差率 |
金属 |
49.6 |
50.3 |
49.8 |
50.1 |
50.2 |
50.0 |
0.0 |
0.0% |
硬纸板 |
48.3 |
51.7 |
49.2 |
50.8 |
50.0 |
50.0 |
0.0 |
0.0% |
布料 |
— |
— |
— |
— |
— |
无响应 |
— |
— |
3.3 不同倾斜角度对测距精度的影响
相同距离、材质条件下,障碍物倾斜角度越大,测距误差率越高:0°(垂直)时误差率1.2%,30°时误差率升至8.7%,45°时误差率达到15.3%。这是因为倾斜角度导致超声波反射方向偏移,传感器接收的回波为“反射后延长路径”的信号,计算出的实测距离大于实际距离,且角度越大,路径延长越明显,误差越大。
表3 不同倾斜角度对测距精度的影响(50cm,金属,单位:cm)
倾斜角度 |
实测1 |
实测2 |
实测3 |
实测4 |
实测5 |
平均值 |
误差值 |
误差率 |
0° |
49.6 |
50.3 |
49.8 |
50.1 |
50.2 |
50.0 |
0.0 |
0.0% |
30° |
54.2 |
54.8 |
53.9 |
55.1 |
54.5 |
54.5 |
4.5 |
9.0% |
45° |
57.6 |
58.2 |
57.1 |
58.5 |
58.1 |
57.9 |
7.9 |
15.8% |
四、结论与讨论
本课题以HC-SR04超声波传感器为核心,成功设计并制作了基于Arduino的可旋转微型雷达装置,实现了0~100cm范围内的环境扫描与障碍物检测功能,完成了不同条件对测距精度影响的探究。实验得出以下核心结论:
1. 该微型雷达在0~100cm短距离、硬质光滑障碍物、垂直测距角度的理想条件下,测距精度高,误差小于±2%,具备简易障碍物检测的实用价值;
2. 障碍物材质对测距效果影响显著,硬质光滑材质反射率高,测距效果好,吸音、多孔材质会导致回波缺失,无法完成测距;
3. 障碍物倾斜角度会直接影响测距精度,角度越大,测距误差越高,反射角偏离传感器接收范围后,将无法识别有效回波。
本次实验仍存在一定的局限性,后续可从以下方面进一步探究与优化:
1. 引入多传感器融合技术,增加多个HC-SR04传感器组成阵列,扩大检测范围,提升对倾斜障碍物的识别能力;
2. 结合蓝牙/Wi-Fi模块,实现微型雷达与移动设备的无线数据传输,摆脱电脑端的有线限制,拓展远程监测应用场景;
3. 优化机械结构,更换高精度舵机,提高扫描步长的精准度,同时设计传感器防护结构,提升装置的稳定性与耐用性;
4. 探究环境温度、湿度对超声波传播速度的影响,在程序中增加环境参数补偿模块,进一步提高测距精度。
通过本次课题研究,小组成员不仅深入理解了超声波测距的物理原理、Arduino编程与电路搭建的核心知识,更在实验设计、问题分析、团队协作中提升了综合科学素养。科创探究的核心在于从实践中发现问题、解决问题,本课题的低成本微型雷达设计,虽与工业级雷达存在差距,但实现了“从理论到实践”的落地,也为后续的科创探究积累了宝贵的实践经验。
参考文献
[1] 王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2020.
[2] 童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2016.
[3] 张福学.传感器应用技术手册[M].北京:电子工业出版社,2018.
