软体机械手的制作与抓取实验研究
1. 徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手的制作与抓取实验研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
学号 |
李清阳 |
男 |
高一16 |
组长 |
zp07g05n03 |
|
武文博 |
男 |
高一16 |
组员 |
zp07g05n01 |
|
王译然 |
男 |
高一16 |
组员 |
zpg07g05n02 |
|
罗云帆 |
男 |
高一16 |
组员 |
zpg07n05z04 |
|
蔡祎晖 |
男 |
高一16 |
组员 |
zpg07no5z05 |
|
指导教师 |
周岩、仝童 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目 的: 本研究旨在通过设计与制作三指型软体机械手,探索其多物体抓取性能,分析软体机械手的结构特性、材料特性及其与抓取性能之间的关系,为软体机器人在医疗辅助、工业柔性抓取等领域的应用提供实验依据。 主要内容: 1. 基于硅胶浇注工艺与电机绳驱控制方法,设计并制作三指软体机械手。 2. 搭建抓取实验平台,测试软体机械手对不同形状、质量及尺寸物体的抓取能力。 3. 分析实验数据,探讨软体机械手的最大抓取力、抓取稳定性及其影响因素。 |
||||
研 究 假 设 |
1. 软体机械手对质量轻、表面弧度较大的物体具有更高的抓取成功率。 |
||||
研 究 方 法 |
实验法、数据分析法。通过制作软体机械手并进行对照实验,记录实验数据,运用统计学方法分析实验结果。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、准备阶段(8月22日-8月25日) 1. 领取“科探方舟”实验器材及科学海报材料。 二、组建团队与培训(8月26日-8月27日) 1. 组建课题小组,明确分工。 三、设计与制作(8月29日-9月10日) 1. 设计三指型软体机械手构型,制作纸板模具。 四、实验测试(9月11日-9月12日) 1. 搭建抓取实验平台,准备实验材料。 五、数据分析与成果制作(9月13日-9月18日) 1. 分析实验数据,得出实验结论。 六、成果评选与汇报9月14日-9月28日 1. 科学海报评选 2. PPT预答辩 3. 科技论文评选 七、闭幕式与总结(9月底) 参加闭幕式,进行成果汇报与表彰。 |
||||
成 果 形 式 |
科学海报、PPT汇报、科技论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2. 徐州一中综合实践活动(研究性学习)记录表
课题题目:软体机械手的制作与抓取研究 |
编号: |
|
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
指导教师:张冠亚 |
班级:高一16班 |
|
参加活动成员: 李清阳、武文博、王译然、罗云帆、蔡祎晖 |
||
活动内容: 1)目的(解决什么问题): 软体机械手适合抓取什么形状的物体?形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 2)过程: ①提前各自在家进行试验 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 3)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ① 结论:软体机械手对质量较轻、形状近似球或圆柱(外表面有弧度)的物品有较好的抓取效果。 ②解决了大家一直疑惑的问题。又产生了新的疑惑:哪一种抓取方式对同一物体的抓取效果最好(指尖抓取/包络抓取)? ③完成了预定目标和计划。 记录者: 王译然 |
||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3. 徐州一中综合实践活动(研究性学习)课题研究成果报告
题 目 |
软体机械手的制作与抓取实验研究 |
||
课题组成员 |
组长:李清阳 |
组员:武文博 王译然 罗云帆 蔡祎晖 |
|
指导教师 |
张冠亚 |
报告执笔人: 蔡祎晖 |
完成时间:12月1日 |
主导课程 |
软体机械手 |
相关课程:物理学 |
|
(一)书面材料 |
|||
课题成果:两个课题均成功,符合预定推测。 课题实际取得的成果: 课题一结果: 通过课题一实验,可知在相同条件下,软体机械手质量较轻、形状近似球或圆柱(外表面有弧度)的物品有较好的抓取效果。 课题二结果: ① 软体机械手在抓取同一尺寸的球形物体时,包络抓取力更大。 ② 软体机械手的最大抓取力随着球形物体尺寸的增大而缓慢变小。 ③ 指尖更适合抓取体积较小的物体。 |
|||
参考书目及资料: [1] M. Zheng, W. Wang. Determination for mechanical constants of rubber Mooney-Rivlin model[J]. China Rubber Industry,2003,50(8):462-465. [2] A. Srivastava, C. Y. Hui. Large deformation contact mechanics of long rectangular membranes. I. adhesionless contact[J]. Proceedings of the Royal Society A :Mathematical, Physical and Engineering Sciences, 2013,469(2160):20130424. [3] H. Wei , Y. Shan, Y. Zhao, et al. A soft robot with variable stiffness multidirectional grasping based on afolded plate mechanism and particle jamming[J]. IEEE Transactions on Robotics, 2022, 38(6):3821-3831. |
|||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 访谈表( )份 实验记录( )份 调查表( )份 测量数据记录( )份 |
|||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||
(三)演示课题成果所需要的条件,要求(如特别需要,请说明): |
|||
4.聚焦仿生机械学——软体机械手的制作与抓取实验研究
李清阳、王译然、蔡祎晖、武文博、罗云帆
(徐州市第一中学高一16班,,江苏徐州,221003)
摘要:软体机械手因其结构柔性、安全性高、适应性强等特点,在近年来逐渐成为机器人领域的重要研究方向。本研究基于硅胶浇注工艺与电机绳驱控制方法,设计并制作了一种三指软体机械手,并围绕两类实验展开性能评估。主要包括驱动器与机械手构型设计、驱动器理论建模、抓取实验平台搭建、驱动器和机械手性能测试。本文重点分析软体机械手的结构特性、材料特性及其与抓取性能之间的关系。研究结果显示软体机械手对质量轻、表面弧度较大、易包络物体具有更高的抓取成功率,而对质量较大、棱角明显或摩擦系数低的物体抓取能力有限,结果表明了所设计的三指型软体机械手抓取系统的有效性和可靠性。
关键词:三指软体机械手;柔性抓取;绳驱控制;抓取性能;
中图分类号:TD94 文献标志码:A
Design of a Three-Fingered Soft Manipulator and Research on Its Multi-Object Grasping Performance
LI Qingyang1,
(1. Xuzhou No. 1 Middle School, Xuzhou Jiangsu 221000, China)
Abstract: Soft robotic manipulators have emerged as a significant research focus in the field of robotics in recent years due to their structural flexibility, high safety, and strong adaptability. This study designed and fabricated a three-finger soft robotic manipulator based on silicone casting technology and motor-cable drive control methods, conducting performance evaluations through two types of experiments. Key aspects included drive and manipulator configuration design, theoretical drive modeling, construction of a grasping test platform, and performance testing of both the drive and manipulator. This paper focuses on analyzing the structural characteristics, material properties, and their relationship with grasping performance of soft manipulators. The results indicate that soft manipulators achieve higher grasping success rates for lightweight objects with significant surface curvature that are easily enveloped. However, their grasping capability is limited for heavier objects with pronounced edges or low friction coefficients. These findings demonstrate the effectiveness and reliability of the designed three-finger soft manipulator grasping system.
Keywords: three-finger soft robotic gripper; flexible grasping; rope-driven control; grasping performance
作者简介:李清阳(2010-),男,江苏徐州人。
0 引 言
生物界中存在大量具有柔性结构的动物,例如大象的鼻子、章鱼触腕等,其高度柔软且具备复杂运动能力[1,3]。这些天然结构为软体机器人研究提供了重要启发。哈佛大学科研团队正是基于此类仿生理念,成功研制出早期的软体机器人原型。与传统刚性机器人相比,软体机器人形态更加多样,且其材料在受力过程中会产生显著的非线性变形,同时具备多自由度与高可变形性等特征。
软体机器手(Soft Robot Hands)作为新兴交叉领域,近年来在国内外研究中快速发展。与传统刚性机械手相比,软体机械手由硅胶、橡胶、织物等柔性材料构成[4]。其具备高顺应性、高安全性、无需精确对位即可完成抓取等优势,被广泛应用于医疗辅助、工业柔性抓取、服务机器人以及教育科创等场景[5,6]。基于软材料的独特力学特性,如大变形、非线性超弹性和环境交互友好性,软体机械手在轻质物体、脆弱物体、多形状复杂物体的抓取方面具有传统结构难以替代的优势[7]。为了实现软体机械臂的多自由度运动,如弯曲、伸缩和扭转,不仅需要选用具有良好柔韧性和延展性的材料,驱动方式同样至关重要。目前常用的驱动方式主要包括绳索驱动(Tendon 驱动)、形状记忆合金驱动(SMA 驱动)以及气动驱动(Pneumatic 驱动)等。其中,Tendon 驱动通过将细绳嵌入机械臂内部,并调节绳索长度来实现形变;SMA 驱动则依靠加热嵌入机械臂的形状记忆合金,使其产生形变,从而带动整个机械臂运动;气动驱动则通过气体作用于内部腔体,推动机械臂发生运动和变形。各种驱动方式下的软体机械如图1所示[8,10]。
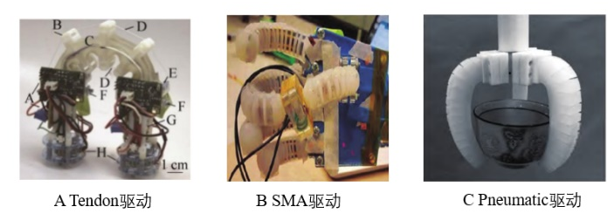
图1 不同驱动方式软体机械手
Figure 1 Soft robotic manipulators with different drive methods
软体机械手在灵巧性和高顺应性方面的优势,其选材必须兼顾柔性、耐磨性、耐腐蚀性以及可控性等多方面性能。目前,常用的材料包括硅橡胶、介电弹性体[11]、纤维增强复合材料[12]、形状记忆合金以及水凝胶[13]等,这些材料能够保障机械手在复杂环境下的稳定性与耐用性,同时支持精确控制与灵活操作。其中,硅橡胶[14]凭借其优异的柔软性、高温耐受性及耐腐蚀性,常用于机械手的外层覆盖或触觉传感器制造。
本研究依托学校科探活动,采用纸板模具、硅胶浇铸、电机绳驱控制的方法制作了三指软体机械手,可进行弯曲抓取运动和侧摆运动自适应抓取。并设计了对照实验对其抓取性能进行系统评估。
1 三指型软体机械手制作
软体机械手的制作主要包括驱动方式、机械手构型和制造技术。本文设计并制作了简易软体机械手,明晰了柔性材料(如硅胶、3D打印弹性体)与电机绳驱控制原理。
1.1 驱动方式
为了确保软体机械手能够实现弯曲、伸展等预期动作,需要采用适当的驱动方式以提供稳定且可控的动力。目前,软体机械手常用的驱动方式包括气动驱动、电机驱动、智能材料驱动、化学反应驱动以及多种驱动方式组合的混合驱动等。
本研究所设计的软体机械手采用电机驱动方式,其结构示意如图2所示。电机作为主要动力源,通过传动机构将动力传递至软体手指,从而实现弯曲等基本动作。相比其他驱动方式,电机驱动具有输出力较大、响应速度快等优势。作为传动机构的拉线具有良好的柔韧性,并能够有效与软体材料集成,同时具备较高的力传递能力,因此成为软体机械手中最常用、最有效的传动方式之一。
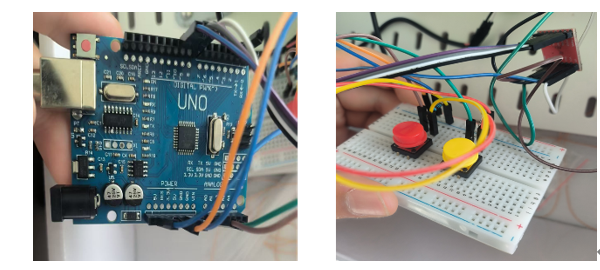
图2 电机驱动
Figure 2 Motor drive
1.2 机械手构型
软体机械手的构型对其抓取方式、制造工艺以及控制策略等均具有重要影响。合理的结构设计能够显著提升机械手的抓取稳定性与适应能力。
本研究采用三指式指抓型软体机械手,其基本构型如图3所示[15]。该结构借鉴人手的多指协调机制,通过多个手指的协同运动实现对目标物体的包覆与固定。通过改变手指数量或关节结构,可进一步扩展其对不同形状与尺寸物体的适应性。一般而言,较多的手指数量能够提供更多的接触点,使抓取姿态更加多样化,从而提高抓取的可靠性与稳固性。
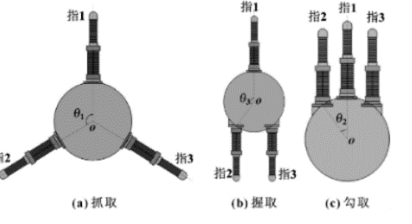
图3 三指式指抓型
Figure 3 Three-finger claw type
1.3 制造技术
制造技术的持续发展为软体机械手的实现提供了重要支撑。由于软体机械手通常采用硅胶、橡胶等柔性材料,其加工方式多依赖柔性材料成型工艺。本研究采用浇铸成型方法制造机械手,工艺流程如图4所示。首先,根据机械手结构要求设计并制作浇铸模具;随后,将预先调配好的硅胶材料注入模具腔体;在材料完成固化后进行脱模,即可获得所需的软体机械手成型结构。该工艺具有操作简单、成型质量稳定和适应各种柔性结构设计等优点。

图4 软体机械手模具
Figure.4 Soft manipulator mold
2 软体机械手抓取性能试验
2.1 试验平台
本文制作了一个三指圆周手爪(三根手指均匀分布在圆周上),两根手指之间的距离a约为10cm;通过代码调节电机控制绳索进行抓握,如图5所示。
图5 软体机械手模具
Figure.5 Soft robotic manipulator mold
整体试验平台如图6所示。
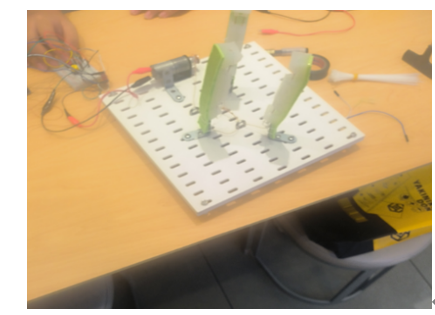
图6 软体机械手试验平台
Figure.6 Soft manipulator test platform
2.2 软爪抓取物体试验
为系统评估三指软体机械手在不同物体条件下的抓取能力,本研究设计了“软爪抓取物体实验”。实验重点考察软体机械手在面对不同形状、不同质量及不同尺寸物体时的抓取成功率与适应能力。
试验物体包括电子秤、大号螺丝刀、直尺(自备)、胶带、塑料球、纸杯、废旧机械手零件等。分别记录被抓物体尺寸、质量以及抓取效果,试验结果如表1所示。
表1 不同物品抓取效果
Table 2 Grab effects for different items
物品 |
近似形状 |
尺寸 |
质量/g |
是否成功 |
电子秤 |
长方体 |
12*1.8*6.4 |
86.43 |
否 |
胶带 |
圆环 |
5.6*3.2*1.5 |
28.42 |
是 |
1号球 |
球 |
4.5*4.5*4.5 |
80.00 |
是 |
防静电胶带 |
圆柱 |
5.2*5.2*4.5 |
151.10 |
否 |
纸杯 |
圆台 |
8.5*5.0*7.5 |
4.50 |
是 |
2号球 |
球 |
4.0*4.0*4.0 |
54.00 |
是 |
条形测力计 |
长方体 |
15*2.2*3.8 |
32.80 |
是 |
螺丝刀 |
圆台 |
12*0.3*1.5 |
40.30 |
否 |
废旧零件 |
长方体 |
15*2.0*2.2 |
47.10 |
是 |
通过上述实验,我们发现软体机械手对质量较轻、形状近似球或圆柱(外表面有弧度)的物品有较好的抓取效果。
其他几种物品抓取失败的原因主要是:物品质量较大、机械手握力较小,致使物品重力大于机械手所能提供的最大静摩擦力;物品形状不够圆滑,棱角突出,对机械手施力效果产生影响。但结果显示,本研究所制作的三指软体机械手对生活中大部分物品能够抓取成功,手指采用的软体材料能够轻松应对易形变物体。
2.2不同抓取方式对软体机械手抓取性能的影响
软体机械手抓取物体通常分为指尖抓取和包络抓取两种形式,为了探究软体机械手的实际负载能力,本实验分别进行了指尖抓取测试和包络抓取测试。利用弹簧测力计对不同抓取方式下测量抓取失效前的最大力值,多次重复试验,记录试验数据。试验结果如表2所示。
表2不同抓取方式的的抓取力
Table 4 Gripping force of different gripping methods
9 |
8 |
7 |
6 |
5 |
4 |
||
指尖抓取力(N) |
重复1 |
0.9 |
0.6 |
1.2 |
2.2 |
3.1 |
3.6 |
重复2 |
1.0 |
0.5 |
1.3 |
2.1 |
3.0 |
3.5 |
|
重复3 |
0.9 |
0.6 |
1.2 |
2.0 |
3.2 |
3.5 |
|
重复4 |
0.8 |
0.7 |
1.2 |
2.1 |
3.2 |
3.5 |
|
平均值 |
0.9 |
0.6 |
1.2 |
2.1 |
3.1 |
3.5 |
|
包络抓取力(N) |
重复1 |
2.3 |
1.4 |
1.5 |
1.0 |
0.0 |
0.0 |
重复2 |
1.9 |
1.6 |
1.5 |
1.0 |
0.0 |
0.0 |
|
重复3 |
1.8 |
1.6 |
1.5 |
1.0 |
0.0 |
0.0 |
|
重复4 |
2.0 |
1.6 |
1.5 |
1.0 |
0.0 |
0.0 |
|
平均值 |
1.9 |
1.6 |
1.5 |
1.0 |
0.0 |
0.0 |
|
本实验系统比较了指尖抓取与包络抓取在不同球体直径下的抓取性能。结果表明,包络抓取在绝大多数直径条件下均表现出更大的平均抓取力、更高的抓取成功率及更好的重复性。软体机械手的最大抓取力随着球形物体尺寸的增大而缓慢减小。
3 结 论
1. 本研究制作的三指软体机械手能够稳定抓取轻质量、表面弧度较大的物体,说明其具有良好的柔顺性和基础抓取能力。但对于质量较大、表面光滑的物体,抓取成功率较低,表明软体机械手仍受限于驱动力和摩擦力不足。
2. 在抓取方式实验中,包络抓取方式的抓取稳定性和最大抓取力明显优于指尖抓取,增大接触面积和包覆程度可以有效提升软体机械手的抓取性能。
参考文献(References):
[1] 杨妍,刘志杰,韩江涛,等. 软体机械臂的驱动方式、建模与控制研究进展[J].工程科学学报, 2022,44(12):2124-2137.
[2] 张进华,王韬,洪军,等. 软体机械手研究综述[J].机械工程学报, 2017,53(13):19-28.
[3] 孙沂琳,张秋菊,陈宵燕.软体驱动器研究综述[J].机械设计,2019,36(2):5-18.
[4] 冯乃诗,王宏,胡佛,等. 软体机器手纤维增强式三腔体结构设计与分析[J].东北大学学报(自然科学版),2019,40(10):1461-1466.
[5] 游显成,俞经虎,钱善华,等. 柔性软体机械手的设计及变形研究[J].现代制造工程,2020,(10):45-50.
[6] 侯涛刚,王田苗,苏浩鸿,等. 软体机器人前沿技术及应用热点[J].科技导报,2017,35(18):20-28.
[7] 刘佳鹏,王江北,赵威,等. 多功能软体机械手的设计与建模[J].机械工程学报,2022,58(09):1-9.
[8] 付敏,王成梦,郝镒林,等. 变结构气动软体机械手的设计及试验研究[J].机床与液压,2023,51(13):7-13+26.
[9] 桓源,任工昌,金光. 片状柔软物操作机械手的研究进展[J].机械设计,2025,42(6):131-139.
[10] 禹鑫燚,赵崇良,陈磊,等. 基于区域姿态解算的五指机械手抓取系统设计与实现[J].机器人,2023,45(6):698-709.
[11] S. Xiang, M. Y. Niu, Z. Wei, et al. A multimode soft gripper with an inflatable toroid for robotic gentle grasping: Swallowing, enveloping, and expansion[J], Sensors and Actuators A: Physical, 2025,393:116797.
[12] 刘羿伯,肖华平,刘传旺,等. 软体仿人灵巧手的研究进展[J].机械传动,2025,49(06):159-176.
[13] 孙先涛,钟明升,高崇,等. 面向灵巧操作的多功能三指软体机械手[J].机械工程学报,2025,61:1-9.
[14] 刘羿伯,肖华平,刘传旺,等. 软体仿人灵巧手的研究进展[J].机械传动,2025,49(6):159-176.
[15] 李康,刘文东,王璐,等. 多功能气动柔性三指机械手设计与实验[J]. 机床与液压,2021,49(9):1-9.