超声波雷达—基于HC-SR04超声波传感器的微型雷达设计与研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
超声波雷达—基于HC-SR04超声波传感器的微型雷达设计与研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
组编号 |
孙阳 |
男 |
高一16 |
组长 |
zp06g06n04 |
|
张一博 |
男 |
高一16 |
组员 |
||
刘睿 |
男 |
高一16 |
组员 |
||
沙鑫辰 |
男 |
高一16 |
组员 |
||
王帅臻 |
男 |
高一16 |
组员 |
||
指导教师 |
周岩 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 超声波雷达作为一种重要的传感器,广泛应用于机器人避障、自动驾驶、智能安防等领域。小组成员打算通过四个课题深化对超声波探测原理的理解,为设计更可靠的探测系统和识别算法奠定基础。 主要内容: 课题一:成功设计并制作一个基于HC-SR04的超声波雷达装置。 课题二:探究不同材质(海绵、高密度泡沫、塑料、木头)对雷达识别效果的影响。 课题三:探究物体不同角度对雷达探测范围(角宽度)的影响。 课题四:探究物体实际宽度与雷达测量宽度的关系,并建立修正模型。 |
||||
研 究 假 设 |
1、材质是影响探测的根本因素,柔软多孔材料具有“隐身”效果。 2、角度影响探测范围,正对时最佳,倾斜时探测范围变窄。 3、宽度影响探测形状,宽度大时物体在雷达上探测到的长度越长。 |
||||
研 究 方 法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
一 、8月22日-8月25日 领取科学盒子和科学海报 录制开箱视频,拍摄开箱照片 二、8月26日-8月27日 领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课 ,检查物资。 三、8月29日-9月10日 1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用科探方舟盒子完成课题探究实验。 四、9月11日-9月12日 1. 进行课题研究进展汇报 2. 成果制作指导课程学习 五、9月13日-9月18日 成果制作和修改 六、9月14日-9月28日 1. 科学海报评选 2. ppt 预答辩 3. 科技论文评选 七、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT,论文 |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||

2.徐州一中综合实践活动(研究性学习)记录表
课题题目:超声波雷达—基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号:zp06g06n04 |
||
活动时间:9月20日 |
第 2 次 |
活动地点:徐州市图书馆 |
|
指导教师:邵馨阅 |
班级:高一16班 |
||
参加活动成员: 组内:孙阳、张一博、刘睿、沙鑫辰、王帅臻 |
|||
活动内容: 1)目的(解决什么问题): 系统探究了物体的材质、角度、宽度等因素如何影响超声波雷达的探测结果 2)形式(小组讨论、试验、查阅资料、调查、实地测量): 实验、查阅资料、小组讨论。 3)过程: ①小组共同完成 ②小组展示、讨论各自的实验及结果 ③查阅资料,形成共识。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题) ①结论:材质是影响探测的根本因素,柔软多孔材料具有“隐身”效果。角度影响探测范围,正对时最佳,倾斜时探测范围变窄。宽度测量存在误差,但可通过建立数据模型进行有效修正。 ②完成了预定目标和计划。新的问题:实验样本种类和数量有限。环境因素(温度、湿度)未加以控制。距离测量的方法精度可以进一步提升。 记录者: 孙阳 |
|||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目:超声波雷达—基于HC-SR04超声波传感器的微型雷达设计与研究 |
编号:zp06g06n04 |
||||
课题组成员 |
组长:孙阳 |
组员:张一博、刘睿、沙鑫辰、王帅臻 |
|||
指导教师:邵馨阅 |
报告执笔人: 孙阳 |
完成时间:9月28日 |
|||
主导课程: |
相关课程:物理学 |
||||
(一)书面材料 |
|||||
课题成果: 1) 预期的成果: 三个实验均成功,符合预定推测。 2) 课题实际取得的成果: 实验一结果:材质是影响探测的根本因素,柔软多孔材料具有“隐身”效果。 实验二结果:角度影响探测范围,正对时最佳,倾斜时探测范围变窄。 实验三结果:宽度测量存在误差,但可通过建立数据模型进行有效修正。 分析与思考:通过实验发现被检测物体的实际宽度越宽,超声波雷达检测到的宽度就越宽;物体的实际宽度和超声波雷达检测到的宽度不一致。可能由这些原因导致: 1.超声波的波束角较宽,导致检测范围大于物体实际宽度 2.物体表面材质影响反射效果(如柔软材质吸收声波,减少回波强度) 3.物体形状或边缘不规则,造成回波的散射 4.温度、湿度影响超声波传播速度 5.雷达不能精确识别物体边缘 |
|||||
附录材料(要求提交原始记录)包括: 活动记录表(1)份 实验记录(1)份 测量数据记录(1)份 |
|||||
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等 编号: 名称: 制作者: 内容: 功能: |
|||||
4.超声波雷达—基于HC-SR04超声波传感器的微型雷达设计与研究
徐州市第一中学高一15班 孙阳、张一博、刘睿、沙鑫辰、王帅臻
【摘要】
摘要:超声波雷达作为机器感知环境的关键传感器,其探测性能受多种因素影响。本研究成功设计并搭建了一套基于Arduino UNO与HC-SR04传感器的超声波雷达实验平台。通过系列控制变量实验,系统探究了物体材质、相对角度及实际宽度对雷达探测效果的影响。实验结果表明:柔软多孔材质(如海绵)对超声波具有显著的吸收作用,可导致探测失效;物体倾斜角度的增大会导致雷达探测范围(角宽度)急剧变窄;雷达测量的物体宽度存在系统性正误差,但可通过建立线性回归模型进行有效修正。本研究为理解超声波雷达的探测机理提供了实验依据,并对优化传感器应用、设计抗探测装置及数据补偿算法具有实践指导意义。
关键词:超声波雷达;HC-SR04;材质吸收;探测角度;宽度修正
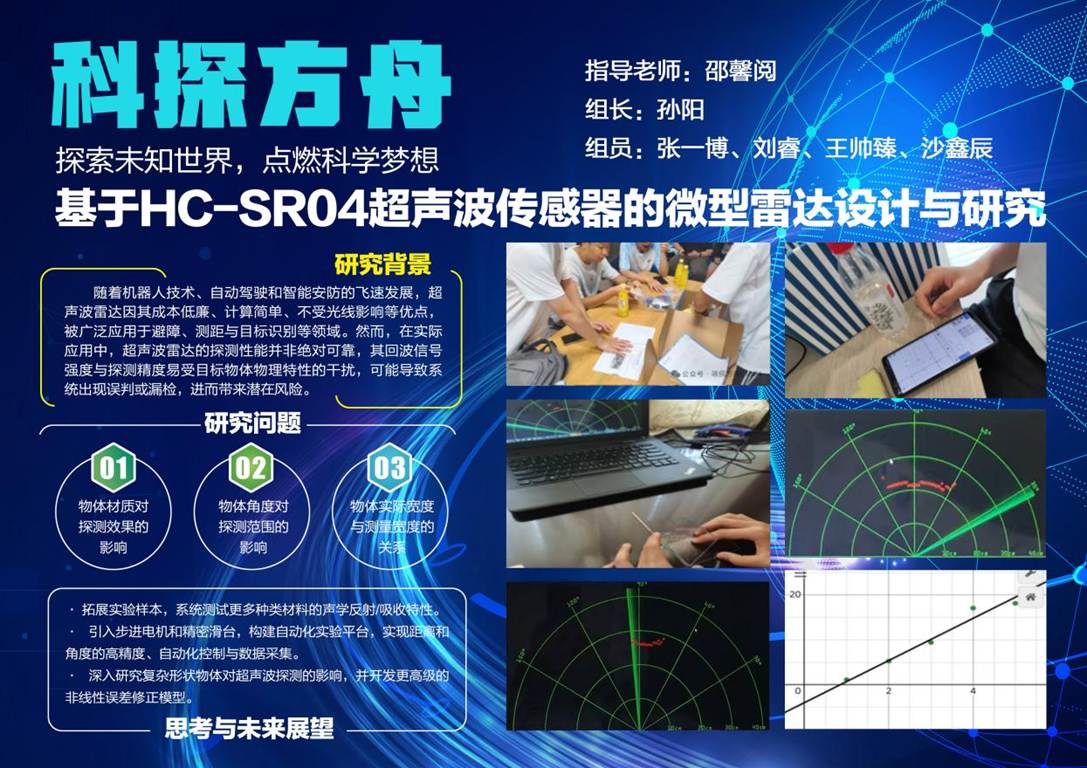
一、研究背景
随着机器人技术、自动驾驶和智能安防的飞速发展,超声波雷达因其成本低廉、计算简单、不受光线影响等优点,被广泛应用于避障、测距与目标识别等领域。然而,在实际应用中,超声波雷达的探测性能并非绝对可靠,其回波信号强度与探测精度易受目标物体物理特性的干扰,可能导致系统出现误判或漏检,进而带来潜在风险。
目前,多数研究集中于超声波雷达的测距算法优化或系统集成,但对于影响其基础探测性能的关键物理因素,如目标材质、姿态角度与尺寸测量误差等,缺乏系统性的实验分析与量化研究。为此,本研究旨在通过可控的实验方法,深入探究上述因素对HC-SR04超声波传感器探测效果的具体影响规律。这不仅有助于深化对超声波探测原理的理解,更能为在实际应用中提高系统鲁棒性、设计规避方案以及开发数据修正模型提供直接的数据支持与实践参考。
课题一:成功设计并制作一个基于HC-SR04的超声波雷达装置。
课题二:探究不同材质(海绵、高密度泡沫、塑料、木头)对雷达识别效果的影响。
课题三:探究物体不同角度对雷达探测范围(角宽度)的影响。
课题四:探究物体实际宽度与雷达测量宽度的关系,并建立修正模型。
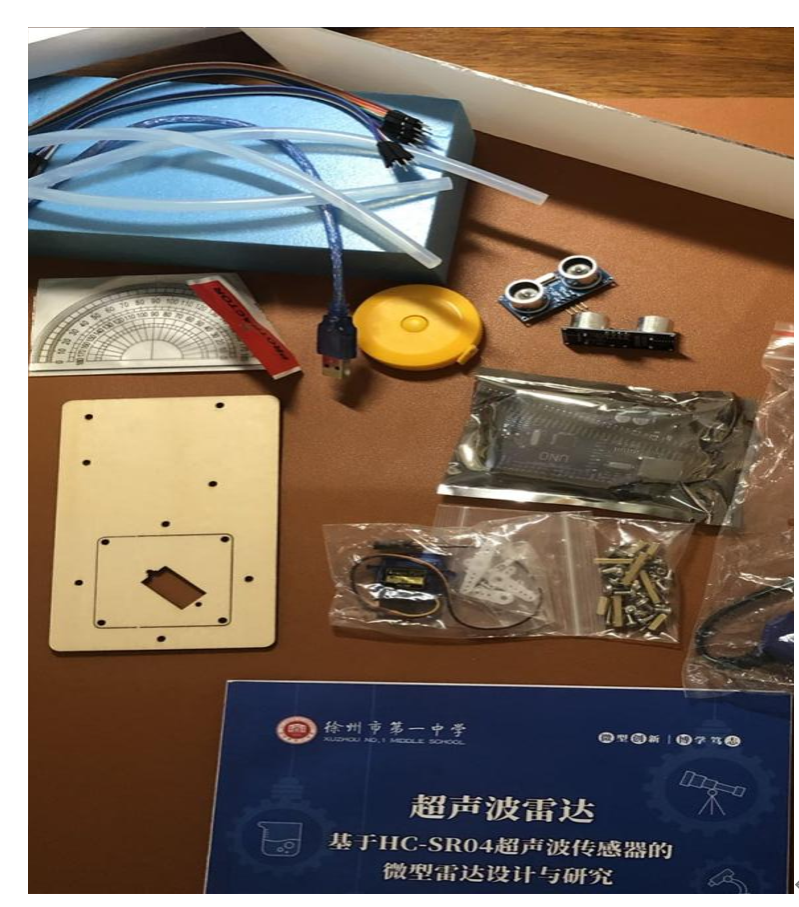
二、实验材料
· 主控制器:Arduino UNO开发板。
· 测距传感器:HC-SR04超声波模块,负责发射与接收40kHz超声波。
· 扫描机构:SG90舵机,用于驱动超声波传感器进行水平扫描。
· 机械结构:采用木片、透明支架与底座组装成雷达支架,确保传感器稳固并可平稳旋转。
· 被测物:为控制变量,将海绵、高密度泡沫、亚克力塑料板、木头板均裁切为标准尺寸的样品。
· 工具:卷尺(用于距离标定)、热熔胶枪(用于固定)、电脑(用于程序上传与数据处理)
三、研究过程
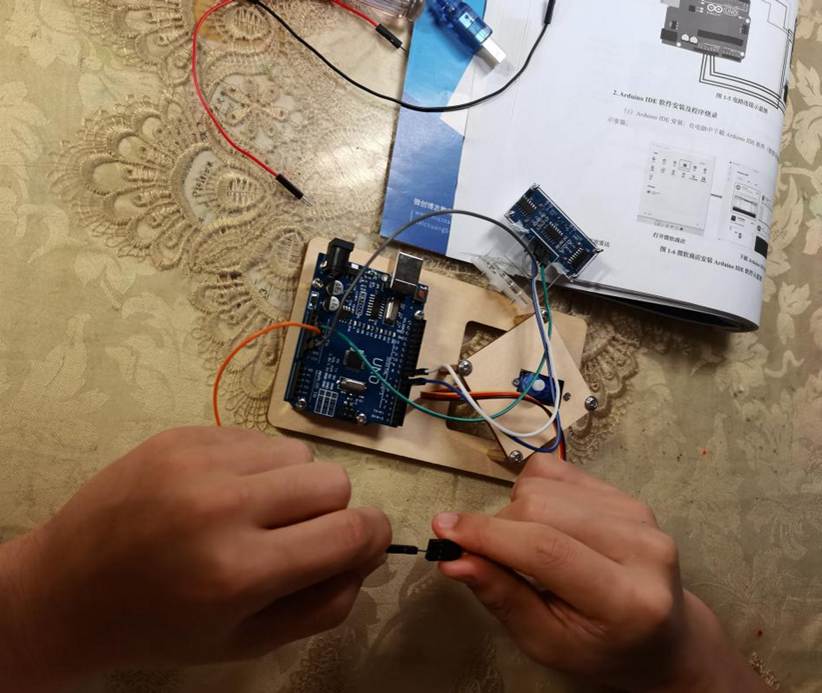
课题一:超声波雷达装置的搭建
将HC-SR04传感器(Trig、Echo引脚)与SG90舵机按电路图连接至Arduino UNO开发板。组装机械结构,并将传感器固定于舵机盘上。上传自主编写的扫描与测距程序,完成装置搭建与功能调试。
课题二:物体材质对探测效果的影响
将不同材质(海绵、高密度泡沫、塑料、木头)的标准样品,依次置于雷达正前方固定距离(如30cm)处。启动雷达扫描,记录雷达是否能稳定识别到物体,并记录其测量的平均距离。每组材质重复实验多次。
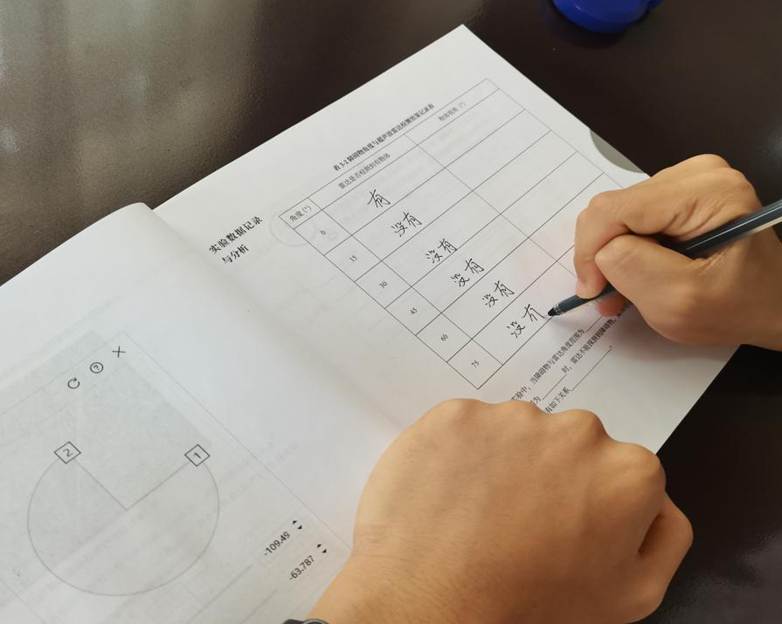
课题三:物体角度对探测范围的影响
选取亚克力塑料板作为标准被测物,固定其与雷达的直线距离。系统性地改变塑料板与雷达声波波束的夹角(从0°开始,以15°为间隔增至75°)。对于每个角度,记录雷达是否能识别物体,并测量雷达扫描到的“物体角宽度”。
课题四:物体实际宽度与测量宽度的关系
准备一组不同宽度(如5cm, 10cm, 15cm, 20cm)的高密度泡沫块。将各泡沫块依次置于雷达前固定位置,通过雷达扫描测量其“表现宽度”。对每个宽度的物体进行多次测量并记录数据。
四、结果与分析
课题一结果:实验结果表明,物体的材质是影响超声波雷达探测的根本性因素。坚硬光滑的表面(如亚克力塑料、木头)能产生强烈而稳定的回波,雷达识别成功率高且测距准确。反之,柔软、多孔的材料(如海绵与高密度泡沫)则表现出显著的声波吸收特性,回波信号极其微弱甚至完全消失,导致雷达无法有效探测,产生“声学隐身”效果。
 |
分析:该现象与超声波的传播机理相符。声波在撞击柔软多孔材料时,其能量被材料的微小空隙和纤维结构通过摩擦转化为热能而大量耗散,无法形成有效的反射回波。
课题二结果:当物体表面与雷达波束垂直(0°夹角)时,探测效果最佳,雷达测得的角宽度最宽。随着倾斜角度的增大,雷达能够探测到物体的角度范围(角宽度)明显变窄。当角度超过一定阈值(如60°)后,雷达可能完全无法探测到物体。
分析:根据波的反射定律,当入射角增大时,反射波束会偏离原方向。对于超声波雷达而言,只有当足够能量的回波被传感器接收时,才能判定目标存在。大角度入射导致反射波束无法返回传感器,从而造成探测盲区。
课题三结果: 实验数据明确显示,超声波雷达测量的物体宽度普遍大于其实际宽度,且误差随实际宽度的增加呈现出一定的规律性。这主要是由于HC-SR04传感器具有一定的波束角(约15°),其探测的是一个锥形区域而非一条直线,导致对物体边缘的界定模糊。
修正方案:为提升测量精度,我们建立了实际宽度与测量宽度之间的线性回归模型。
1. 收集所有宽度实验的成对数据(实际宽度为X,测量宽度为Y)。
2. 在Excel中绘制散点图,并添加线性趋势线,得到回归方程 Y = aX + b (例如:Y = 1.15X + 2.1)。
3. 通过方程逆推,得到从测量宽度Y推算实际宽度X的修正公式:X = (Y - b) / a。
将该修正模型应用于新的测量数据,可显著减小宽度测量的系统误差。
五、综合讨论与应用思考
超声波雷达规避装置设计
若要设计一个能够规避超声波雷达探测的装置,可结合本实验的结论:
1. 材料选择:采用厚海绵或软橡胶等强吸声材料作为外壳,从根本上减弱回波。
2. 外形设计:将外形设计为多棱角(如金字塔阵列)或大曲率弯曲表面,使入射超声波被散射至其他方向,极大降低返回雷达的能量。结合材料与外形两种策略,可以构建高效的超声波“隐身”装置。
3.系统优化方向
本实验揭示了超声波雷达的固有局限性。在实际系统设计中,可通过以下方式优化:
· 多传感器融合:结合红外、激光或视觉传感器,弥补超声波在特定材质和角度下的探测短板。
· 智能识别算法:根据回波强度特征,初步判断物体材质属性。
· 动态阈值调整:在不同环境下自适应调整探测灵敏度阈值,以平衡漏检与误报。