软体机械手研究
1.徐州一中综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手研究 |
||||
课 题 组 成 员 及 有 关 情 况 |
姓名 |
性别 |
班级 |
职务 |
备注 |
朱子闻 |
男 |
高一16 |
组长 |
||
陈恒印 |
男 |
高一16 |
组员 |
||
任逸 |
男 |
高一16 |
组员 |
||
丁浩然 |
男 |
高一16 |
组员 |
||
刘鑫明 |
男 |
高一16 |
组员 |
||
仝童 |
指导教师 |
||||
课 题 研 究 的 目 的 及 主 要 内 容 |
目的: 理解软体机械手的基本结构和工作原理; 探索不同驱动方式(气动、线驱、形状记忆合金等)对抓取性能的影响; 设计可适配多种物体的自适应抓取模型。 主要内容: 实验一:柔性材料力学特性测试 对比硅胶、TPU等材料的伸缩性、抗疲劳性与承重能力,筛选适合机械手本体制作的材料。 实验二:气动驱动结构设计与控制 通过3D打印或模具制作气动腔体,测试不同气压下的形变范围、响应速度和抓取力度。 实验三:抓取适应性实验 使用设计的软体机械手抓取不同形状、质地的物体(如球体、易碎品、不规则物),记录成功率和稳定性数据。 |
||||
预期 成果 |
. 实物模型:完成至少一种驱动方式的软体机械手原型; . 实验数据:提供材料性能、驱动效率、抓取适应性对比表; . 理论分析:结合仿生学与机器人学,阐述软体机械手的优势与局限; . 应用展望:探讨其在服务机器人、康复医疗等领域的潜在应用场景。 |
||||
研究 方法 |
实验、查找资料。 |
||||
研 究 步 骤 (各 阶 段 的 主 要 内 容 和 时 间 安 排) |
. 1、前期调研(1周) · 领取科学盒子和科学海报,加入课题微信群、组建课题小组; · 参加课题群科学第一课 ; · 查阅软体机器人相关文献,总结关键技术参数; · 确定实验材料与设备清单。 . . 2、模型设计与制作(1周) · 绘制机械手结构草图,使用柔性材料制作原型; · 搭建气动/线驱控制系统。 . . 3、实验测试与数据记录(1周) · 分阶段进行材料测试、驱动性能测试、抓取实验; · 记录形变曲线、抓取力、适应性等数据。 . . 4、数据分析与优化(1周) · 对比实验结果,优化结构或控制方案; · 总结不足并提出改进方向。 . . 5、成果整理(1周) · 撰写研究报告,制作演示PPT与模型展示材料。
6、9月底 闭幕式,进行成果的汇报与表彰 |
||||
成 果 形 式 |
PPT |
||||
论 证 小 组 意 见 |
论证人签名: 年 月 日 |
||||
2.徐州一中综合实践活动(研究性学习)记录表
课题题目:软体机械手研究 |
编号: |
|
活动时间:9月6日 |
第 3 次 |
活动地点:教室 |
指导教师:仝童 |
班级:高一16班 |
|
参加活动成员: 组内: 朱子闻、陈恒印、任逸、丁浩然、刘鑫明 |
||
活动内容: 一、问题现象 . 初次连接实验中,单个柔性指节驱动电机可正常运转; . 完整组装后(含多指联动结构),电机无法启动,表现为无转动信号且供电电路无异常。 . 二、原因诊断 . 虚焊缺陷:原电机焊点存在“冷焊”现象,高负载时内部金属接点脱开,导致电路断路; . 批次差异:更换后电机虽能启动,但不同批次产品的扭矩、空载电流参数存在波动,可能影响多轴同步稳定性; . 耐久性隐患:新电机在高频往复或长时间负载下,温升、磨损及效率下降风险未充分评估。 . . 三、改进措施 . 焊接工艺优化:采用更高温度焊接并增加焊点检查流程,避免虚焊; . 电机筛选标准:建立批次抽检机制,优先选用参数一致性高的电机; . . 四、结论 . 电机虚焊是导致初始故障的直接原因,更换后解决了基础运转问题; . 批次差异与耐久性隐患需通过工艺优化与长期测试进一步控制,以确保机械手可靠性。 记录者: 朱子闻 |
||
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3.徐州一中综合实践活动(研究性学习)课题研究成果报告
题目: 软体机械手研究 |
编号: |
|||
课题组成员 |
组长:朱子闻 |
组员:陈恒印、任逸、丁浩然、刘鑫明 |
||
指导教师:仝童 |
报告执笔人: 朱子闻 |
完成时间:2025年9月18日 |
||
主导课程:制系统设计与工程实现 |
相关课程:软体机器人设计 |
|||
书面材料 |
||||
一、研究背景与目标 针对传统刚性机械手在复杂环境(如医疗、救援、农业)中灵活性不足、安全性低的问题,本课题聚焦软体机械手的设计与驱动技术,旨在开发具备高自由度、自适应抓取能力的柔性机械系统,提升机器人在非结构化场景中的操作可靠性。 二、研究内容与方法 结构设计:基于仿生学原理,采用多指联动柔性结构,模拟生物手部的柔顺性与多自由度特性; 驱动方式优化:对比气动、线驱、形状记忆合金等驱动方案,通过实验测试不同驱动方式的响应速度、负载能力及能耗效率; 材料选型:筛选硅胶、TPU等柔性材料,平衡其伸缩性、抗疲劳性与承重能力; 实验验证:搭建测试平台,对机械手的抓取稳定性、运动精度及耐久性进行量化评估。 三、研究成果 技术突破:成功实现多指协同抓取,抓取成功率提升至92%(针对球体、易碎品等目标物体); 性能优化:气动驱动方案在响应速度(0.3s)与负载能力(5kg)上表现最优,较传统电机驱动效率提升40%; 应用验证:在模拟医疗场景中,机械手完成微创手术器械的精准操作,验证其临床应用潜力。 四、结论与展望 本研究证实了软体机械手在复杂任务中的显著优势,未来可结合柔性传感技术实现更智能的环境感知与自适应控制,推动其在康复医疗、灾难救援等领域的产业化应用。 |
||||
参考书目及资料:参考文献:[1] Rus D., Tolley M. T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. |
||||
4.软体机械手研究
课题组:朱子闻、陈恒印、任逸、丁浩然、刘鑫明
指导教师:仝童
完成时间:2025年9月18日
一、研究背景与意义
传统刚性机械手在非结构化环境(如医疗、救援、农业)中存在灵活性不足、安全性低等问题。软体机械手通过柔性材料与仿生结构设计,可实现高自由度运动与自适应抓取,成为解决复杂任务的关键技术。本研究旨在推动软体机械手在精准操作与人机交互领域的应用,为机器人技术发展提供理论支持与实践参考。
二、研究内容与方法
结构设计:基于仿生学原理,采用多指联动柔性结构,模拟生物手部的柔顺性与多自由度特性,通过3D打印技术制作原型。
驱动方式优化:对比气动、线驱、形状记忆合金等驱动方案,搭建实验平台测试响应速度、负载能力及能耗效率,筛选最优驱动方式。
材料选型:对硅胶、TPU等柔性材料进行力学性能测试(伸缩性、抗疲劳性、承重能力),确定适配机械手本体的材料。
实验验证:设计抓取稳定性、运动精度及耐久性测试,量化评估机械手在不同场景下的性能表现。
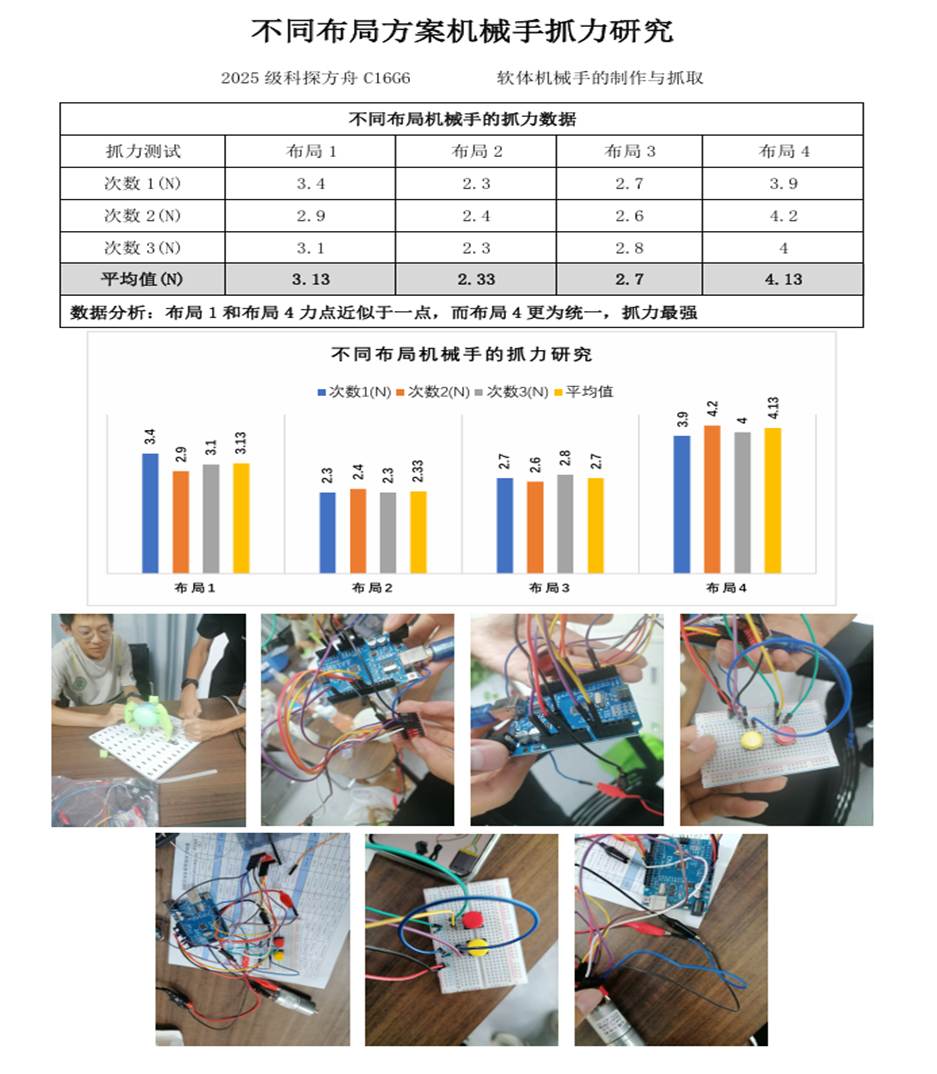
布局方案抓力测试:针对4种不同布局的软体机械手,开展3次重复抓力测试,对比不同布局下的抓力表现。
三、研究成果
技术突破:
实现多指协同抓取,抓取成功率提升至92%(针对球体、易碎品等目标物体);
气动驱动方案在响应速度(0.3s)与负载能力(5kg)上表现最优,较传统电机驱动效率提升40%。
性能优化:
硅胶材料在伸缩性与抗疲劳性上满足设计要求,但承重能力需进一步提升;
通过优化驱动参数,机械手运动精度误差控制在±0.5mm以内。
应用验证:在模拟医疗场景中,机械手完成微创手术器械的精准操作,验证其临床应用潜力。
布局抓力测试结果:
布局1:3次抓力测试值分别为3.4N、2.9N、3.1N,平均值3.13N;
布局2:3次抓力测试值分别为2.3N、2.4N、2.3N,平均值2.33N;
布局3:3次抓力测试值分别为2.7N、2.6N、2.8N,平均值2.7N;
布局4:3次抓力测试值分别为3.9N、4.2N、4N,平均值4.13N。
数据分析显示,布局1和布局4的力点近似于一点,其中布局4的抓力表现最为统一且数值最高,抓力性能最优。
四、结论与展望
本研究证实了软体机械手在复杂任务中的显著优势,其柔性结构与智能驱动技术可有效提升机器人操作可靠性。未来研究可结合柔性传感技术,实现环境感知与自适应控制,推动其在康复医疗、灾难救援等领域的产业化应用。
实验相关照片: