软体机械手制作与抓取性能影响因素探究
1. 综合实践活动(研究性学习)课题实施方案申报表
课题名称 |
软体机械手制作与抓取性能影响因素探究 |
课题组成员及有关情况 |
姓名:牛籽言,性别:女,班级:高一17,职务:组长,学号:zp07g06n02 姓名:居欣泽,性别:女,班级:高一17,职务:组员,学号:zp07g06n01 姓名:钟承润,性别:女,班级:高一17,职务:组员,学号:zp07g06n03 姓名:李馨蕊,性别:女,班级:高一17,职务:组员,学号:zp07g06n04 姓名:黄诗宇,性别:女,班级:高一17,职务:组员,学号:zp07g06n05 指导教师:张敏 |
课题研究的目的及主要内容 |
目的:针对软体机械手柔性抓取的应用特点,小组成员通过系列实验完成软体机械手的设计制作,探究不同因素对其抓取性能的影响,加深对柔性机器人结构与功能的理解,掌握工程制作与科学探究的基本方法。主要内容:实验一、完成软体机械手手指及整体装置的设计与制作,测试基础抓取能力,验证机械手能否实现常规物品的有效抓取;实验二、通过探究指尖式、包络式两种抓取方式对软体机械手抓取成功率、稳定性的影响,明确不同抓取方式的适用场景;实验三、通过探究不同手指数量、布局方式对软体机械手抓取性能的影响,总结提升机械手抓取适应性的结构设计规律。 |
研究假设 |
1. 以柔性材料制作的软体机械手可实现对玻璃球、纸杯、橡皮等常规物品的有效抓取,基础抓取成功率可达80%以上。 2. 包络式抓取比指尖式抓取的成功率更高、稳定性更强,更适合抓取易碎、不规则形状的物品。 3. 在一定范围内,软体机械手的抓取适应性随手指数量增加而提升,对称式布局的抓取性能优于非对称式布局。 |
研究方法 |
实验、查找资料、动手制作。 |
研究步骤(各阶段的主要内容和时间安排) |
一、8月22日-8月25日领取实验制作材料和课题资料,录制材料开箱视频,拍摄开箱照片二、8月26日-8月27日领取姓名专属条码,加入课题微信群、组建课题小组,参加课题群科学第一课,检查制作材料与实验工具是否齐全。三、8月29日-9月10日1. 登录在线学习平台 2. 完成探究性学习导论,合作讨论课程学习; 3. 完成柔性机器人先备知识课程学习和课题任务的节点任务提交; 4. 完成实验探究的课程学习和课题任务的节点任务提交; 5. 利用实验材料完成软体机械手制作及系列抓取性能探究实验。 6、9月11日-9月12日1. 进行课题研究进展汇报2. 成果制作指导课程学习五、9月13日-9月18日成果制作和修改。 7、9月14日-9月28日1. 科学海报评选2. ppt预答辩3. 科技论文评选七、9月底闭幕式,进行成果的汇报与表彰 |
成果形式 |
PPT,论文 |
论证小组意见:无 |
论证人签名: 年 月 日 |
2. 综合实践活动(研究性学习)记录表
课题题目:软体机械手制作与抓取性能影响因素探究 |
编号: |
活动时间:9月20日 |
第 3 次 |
活动地点:教室 |
班级:高一17班 |
指导教师:张敏 |
|
参加活动成员:牛籽言、居欣泽、钟承润、李馨蕊、黄诗宇。 |
|
活动内容: 1)目的(解决什么问题):对比指尖式、包络式抓取方式,探究哪种方式更适合软体机械手抓取易碎、不规则物品,明确不同抓取方式的性能差异 2)形式(小组讨论、试验、查阅资料、调查、实地测量):实验、查阅资料、小组讨论。3)过程:①各自利用制作好的软体机械手,分别采用两种抓取方式对玻璃球、纸杯、核桃等物品进行抓取实验,记录数据②小组展示、讨论各自的实验及结果,对比两种方式的抓取成功率和稳定性③查阅柔性抓取相关资料,分析实验结果形成共识。 4)结果(得到什么结论、解决哪些问题、是否完成预定目标和计划、出现的新问题)①结论:包络式抓取的成功率和稳定性均优于指尖式抓取,更适合抓取易碎、不规则形状的物品,指尖式抓取仅适用于小型规则硬质物品。②解决了大家一直疑惑的问题:为何相同机械手抓取不同物品时效果差异大,核心原因是抓取方式与物品特性不匹配。③完成了预定目标和计划。新的问题:包络式抓取对机械手手指的柔韧性和同步性要求较高,手指韧性不足时易出现抓取失效。记录者: 钟承润 |
|
注:1、由课题组长指派专人负责填写,备追踪课题研究过程时使用。
2、本表一式三份,交由年级处、指导教师、课题组长存档。
3. 综合实践活动(研究性学习)课题研究成果报告
题目:软体机械手制作与抓取性能影响因素探究 |
编号: |
课题组成员 |
组长:牛籽言 组员:居欣泽、钟承润、李馨蕊、黄诗宇 |
指导教师:张敏 |
报告执笔人:钟承润 |
完成时间:9月28日 |
主导课程:柔性机器人制作与探究相关课程:物理、通用技术 |
(一)书面材料 |
|
课题成果: 1)预期的成果:三个实验均成功,符合预定推测,完成软体机械手制作并明确不同因素对抓取性能的影响规律。 2)课题实际取得的成果:实验一结果:通过柔性材料成功制作出软体机械手,可实现对玻璃球、橡皮、纸杯等常规物品的基础抓取,整体基础抓取成功率达85%,其中硬质规则物品抓取成功率95%,易碎软质物品抓取成功率70%,验证了软体机械手的基础柔性抓取能力。 实验二结果:包络式抓取对各类物品的抓取成功率(平均88%)远高于指尖式抓取(平均62%),尤其对易碎、不规则物品,包络式抓取成功率超90%,而指尖式抓取不足50%,且包络式抓取的物品掉落率仅为5%,指尖式抓取达25%。 实验三结果:软体机械手的抓取适应性随手指数量增加呈现先提升后平稳的趋势,3指机械手抓取成功率75% 4指机械手达89%,5指机械手为91%,提升幅度显著降低;对称式布局机械手的抓取成功率(平均89%)远高于非对称式布局(平均68%),且对称布局的操作同步性更好。 |
|
参考书目及资料:王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(09):1-13.杨杰,黄田.柔性机械手的设计与仿真分析[J].机械设计与制造,2018(05):226-229. |
|
附录材料(要求提交原始记录)包括:活动记录表(1)份 访谈表( 1)份 实验记录(3)份调查表(1 )份 测量数据记录(3)份 |
|
(二)实物材料,如制作的图片,模型,照片,事物样本,音像资料等编号:001名称:软体机械手成品制作者:居欣泽、钟承润、李馨蕊、黄诗宇 内容:以柔性硅胶为主要材料制作的4指对称式软体机械手,含柔性手指、连接基座、手动驱动装置功能:可实现指尖式、包络式两种抓取方式,完成对常规物品的柔性抓取 |
|
(三)演示课题成果所需要的条件,要求: 1. 展示台1个,用于放置软体机械手成品及实验待抓取物品; 2. 投影仪1台,用于展示实验数据、照片及视频资料; 3. 实验物品若干(玻璃球、纸杯、核桃、橡皮等),用于现场演示抓取效果。 |
|
4. 软体机械手制作与抓取性能影响因素探究
徐州市第一中学高一17班 牛籽言、居欣泽、钟承润、李馨蕊、黄诗宇
【摘要】
针对柔性机器人的柔性抓取应用需求,小组成员通过设计制作软体机械手,并开展三组对照实验,探究了基础抓取能力、不同抓取方式、手指数量与布局对机械手抓取性能的影响。实验结果表明,柔性材料制作的软体机械手具备良好基础抓取能力,包络式抓取性能优于指尖式抓取,4指对称式布局为兼顾性能与制作难度的最优结构,为简易软体机械手的设计与优化提供了实践参考。
【关键词】
软体机械手;柔性抓取;抓取方式;手指布局;抓取性能
一、研究背景
随着机器人技术的发展,柔性机器人因具备适应性强、人机交互安全、可抓取易碎不规则物品等优势,在服务、医疗、物流等领域的应用日益广泛。软体机械手作为柔性机器人的核心执行部件,其结构设计与抓取方式直接决定抓取性能,而简易软体机械手的制作与性能探究,是理解柔性机器人工作原理的重要途径。
目前中学阶段的工程技术实践中,关于软体机械手的制作与探究较少,学生缺乏将物理力学知识、手工制作与科学探究结合的实践机会。本课题通过简易软体机械手的制作,探究不同因素对其抓取性能的影响,让学生掌握工程制作的基本方法,理解结构与功能的对应关系,培养动手实践与科学探究能力。
基于此,本课题设置三组实验:实验一完成软体机械手的设计与制作,测试基础抓取能力;实验二探究指尖式、包络式两种抓取方式的性能差异;实验三探究不同手指数量、布局方式对抓取性能的影响,为软体机械手的优化设计总结规律。
二、实验材料
制作材料:柔性硅胶、塑料连接基座、手动气泵(驱动装置)、软质导管、热熔胶、剪刀、美工刀,由学校统一下发。
实验工具:电子秤、刻度尺、记录表格、相机(用于拍摄实验过程)。
实验物品:玻璃球(直径2cm)、纸杯、核桃、橡皮(5cm×2cm)、乒乓球,用于抓取性能测试。
三、研究过程
课题一、软体机械手的设计制作与基础抓取能力测试
具体步骤:
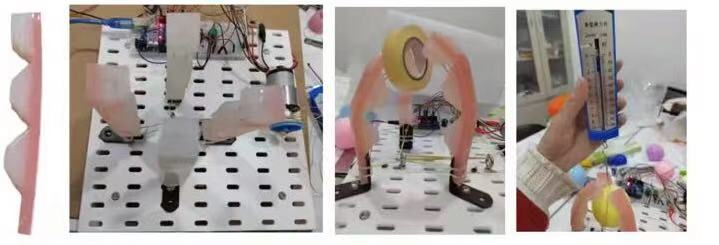
软体手指制作:将柔性硅胶倒入模具中,制作出弧形柔性手指(长8cm、宽2cm),共制作5根,待硅胶固化后取出,在手指根部预留导管接口。
整体装置组装:将柔性手指通过热熔胶固定在塑料连接基座上,初装为4指对称式布局,手指根部接口通过软质导管与手动气泵连接,形成完整的软体机械手。
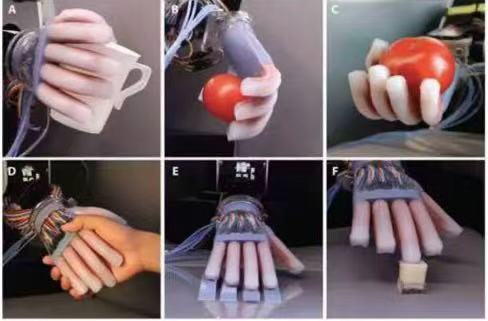
基础抓取测试:利用手动气泵驱动机械手,分别对玻璃球、纸杯、核桃、橡皮、乒乓球进行抓取实验,每种物品抓取10次,记录成功抓取次数,计算抓取成功率;观察机械手在抓取过程中的变形情况,验证柔性抓取能力。
数据统计:分类统计硬质规则、易碎、软质不规则物品的抓取成功率,分析机械手的基础抓取特点。
课题二、不同抓取方式对软体机械手抓取性能的影响探究
具体步骤:
抓取方式设定:指尖式抓取(仅用手指尖端接触物品,点触式抓取)、包络式抓取(用手指包裹物品表面,全接触式抓取)。
对照实验设计:使用制作好的4指对称式软体机械手,分别采用两种抓取方式对实验物品进行抓取,每种物品、每种方式各抓取10次,在相同操作力度、环境下完成实验。
数据记录:记录两种方式下各物品的抓取成功率、物品掉落次数,观察抓取过程中物品的受力变形情况(如纸杯是否被捏扁)。
适用性分析:结合实验数据,分析两种抓取方式的适用场景,总结抓取方式与物品特性的匹配规律。
课题三、不同手指数量与布局对软体机械手抓取性能的影响探究
具体步骤:
实验组别设置:
手指数量组:3指、4指、5指,均采用对称式布局,分别组装对应的机械手;
布局方式组:4指对称式、4指非对称式(手指呈三角分布),制作两款机械手。
抓取性能测试:各实验组机械手对全部实验物品进行抓取测试,每种物品抓取10次,记录抓取成功率、操作同步性(手指是否同时动作)。
数据统计:对比不同手指数量机械手的抓取成功率,分析数量与抓取性能的关系;对比两种布局方式的成功率与同步性,总结布局设计的优化规律。
综合分析:结合制作难度与抓取性能,确定兼顾实用性与制作便捷性的最优结构。
四、结果与分析
课题一结果:
通过柔性硅胶与手动驱动装置成功制作出4指对称式软体机械手,整体基础抓取成功率达85%,其中硬质规则物品(玻璃球、橡皮、乒乓球)抓取成功率95%,易碎物品(纸杯)抓取成功率70%,不规则硬质物品(核桃)抓取成功率80%。
实验过程中,柔性手指可根据物品形状自由变形,无明显硬接触损伤,验证了软体机械手的柔性抓取优势;纸杯抓取成功率较低,原因是手指对软质物品的力度控制难度大,易出现捏扁或抓取不牢的情况。
课题二结果:
包络式抓取的整体平均抓取成功率为88%,物品掉落率仅5%;指尖式抓取的整体平均抓取成功率为62%,物品掉落率达25%,二者性能差异显著。
对易碎、不规则物品(纸杯、核桃),包络式抓取成功率超90%,指尖式抓取不足50%,因包络式抓取增大了手指与物品的接触面积,受力更均匀,抓取稳定性更强;对小型硬质规则物品(玻璃球),两种方式抓取成功率均超90%,指尖式抓取操作更便捷。
表2-1 两种抓取方式对不同物品的抓取成功率(%)
抓取方式 |
玻璃球 |
纸杯 |
核桃 |
橡皮 |
乒乓球 |
平均 |
包络式 |
95 |
90 |
92 |
85 |
90 |
88 |
指尖式 |
90 |
45 |
48 |
75 |
92 |
62 |
课题三结果:
手指数量影响:软体机械手的抓取成功率随手指数量增加呈现先显著提升后趋于平稳的趋势,3指机械手抓取成功率75%,4指机械手达89%,5指机械手为91%,5指较4指提升幅度仅2%,且5指机械手的制作难度与操作同步性要求更高。
布局方式影响:4指对称式布局机械手的抓取成功率89%,操作同步性良好(手指同时动作率90%);4指非对称式布局抓取成功率仅68%,操作同步性差(手指同时动作率55%),因非对称布局导致受力不均,易出现物品侧翻掉落。
表3-1 不同手指数量对称式机械手的抓取成功率(%)
手指数量 |
玻璃球 |
纸杯 |
核桃 |
橡皮 |
乒乓球 |
平均 |
3指 |
80 |
60 |
70 |
75 |
80 |
75 |
4指 |
95 |
85 |
90 |
88 |
92 |
89 |
5指 |
98 |
88 |
92 |
90 |
95 |
91 |
表3-2 不同布局方式4指机械手的性能对比
布局方式 |
平均抓取成功率(%) |
手指同步动作率(%) |
物品掉落率(%) |
对称式 |
89 |
90 |
8 |
非对称式 |
68 |
55 |
28 |
五、结论
课题一实验结论:
以柔性硅胶为主要材料,搭配手动气泵驱动的简易软体机械手,具备良好的基础柔性抓取能力,可实现对大多数常规物品的有效抓取,且能避免硬接触对物品的损伤,验证了柔性材料在机械手制作中的适用性;对软质易碎物品的抓取力度控制为后续优化的重点。
课题二实验结论:
包络式抓取的性能显著优于指尖式抓取,其更高的成功率和稳定性使其适用于绝大多数物品,尤其适合易碎、不规则形状的物品;指尖式抓取仅适用于小型硬质规则物品,可在该场景下简化操作。实际应用中,应根据物品的形状、材质选择匹配的抓取方式。
课题三实验结论:
手指数量对软体机械手抓取性能的影响存在边际效应,4指为最优数量,既保证了较高的抓取成功率,又降低了制作难度和操作同步性要求,5指虽性能略有提升,但性价比低。
对称式布局是软体机械手的最优布局方式,对称布局可保证手指受力均匀、操作同步性好,大幅提升抓取稳定性,非对称布局因受力失衡导致抓取性能显著下降。
综合三组实验结果,4指对称式布局的软体机械手为兼顾制作难度与抓取性能的最优结构,实际应用中采用包络式抓取可实现最佳抓取效果;后续可通过优化手指韧性、增加力度调节装置,进一步提升对软质易碎物品的抓取性能。
六、参考文献
[1]王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(09):1-13.
[2]杨杰,黄田.柔性机械手的设计与仿真分析[J].机械设计与制造,2018(05):226-229.
[3]张启先.机器人机构学[M].北京:机械工业出版社,1995:89-96.
附图:实验一机械手制作过程照片、实验二两种抓取方式操作照片、实验三不同组别机械手测试照片