成熟了么——颜色的形成、识别及功能电路搭建
成熟了么——颜色的形成、识别及功能电路搭建
组长:张又文 组员:梁光泰,李小未
指导老师:赵玉团老师
摘要:在本次课题旨在探索颜色的形成原理、识别原理以及解决如何搭建功能电路的问题。通过测量不同颜色物体对不同色光的反射光差异,选取红绿两色的苹果代替成熟与未成熟的果实进行实验,多次换取照射测光探究他们的反射光差异,在搭建功能电路时将它们作为变量,通过光敏电阻的阻值变化控制电路中LED的亮暗,从而区分。结果表明:不同颜色物体反射光强有差异,实验选取的两个颜色,红色物体的反射光能力普遍大于绿色,对应的光敏电阻阻值小,电路中的灯亮起,机器人就是通过对反射光强弱的识别来判别果实成熟度。结果提示:物体的颜色并不是唯一的影响因素,在实验进行时,电路中个别原件正负极的接入方向,以及环境光强,照射光线的颜色,都是响实验成功的关键。关键词:不同色光,红绿果模型,反射光强差异
引言:采摘是水果生产链条中最耗时、最耗力的环节,在果农的经营成本中,雇佣采摘工人的费用占据了 50%~70%。然而今天劳动力市场的大背景是:农业劳动力向其他产业转移,人口老龄化加剧农业劳动力的缺失,雇佣农工的成本逐渐增高。以色列采摘机器人公司 Tevel Aerobotics Technologies 的官网上标注了几个数据:到 2050 年,人口将增长 40%,需要水果产量翻一番;到 2050 年,农业就业人数将减少一半,导致 500 万水果采摘者短缺,进而导致全球超过 10% 的水果无法收获(相当于欧盟的年消费量)。对于必须处理这样复杂又模糊的信息,只有靠具有人类相同的认知能力和学习功能的的智能农业机械———农业机器人才可以实现。与发达国家相比,我国的农业机器人起步整整晚了十余年的时间,相比于其他国家农业机器人技术的日渐成熟,我国不管在技术的研发还是应用上都还处于起步阶段。受市场投资、发展速度和机器人技术差距影响,早期我国农业机器人的发展较为艰难。但随着自动化和城镇化进程的不断加快,我国农业机器人的研发范围取得一定进展。同时,在国家经济、科技都获得快速发展的情况下,国家加大了对农业机械化发展的扶持力度,如今我国农业机器人已经迎来了良好发展期。可以预计,21世纪将是农业机械智能化方向的发展重要时期。
活动一:果实成熟指标调查研究
实验目的:结合日常生活及网络资源等,调研果蔬成熟的相关指标及判定方法
序号 |
果实名称 |
成熟指标及判定方法 |
|||||
指标一 |
方法 |
指标二 |
方法 |
指标三 |
方法 |
||
1 |
西红柿 |
果皮颜包 |
由绿到红 |
果实硬度 |
由硬变软 |
果实风味 |
由涩变甜
|
2 |
苹果 |
果皮颜包 |
由绿到红
|
果实硬度
|
由硬变软
|
易脱离程度 |
由难到易 |
3 |
黄瓜 |
果皮颜包 |
由浅绿到深绿
|
果实硬度
|
由硬变软
|
表面粗糙程度 |
粗糙到光滑 |
4 |
葡萄 |
果皮颜包 |
由绿到紫
|
果实硬度 |
由硬变软
|
果实风味
|
由涩变甜
|
5 |
猕猴桃 |
果实硬度
|
由硬变软 |
易脱离程度
|
由难到易
|
表面绒毛 |
由多到少 |
6 |
桃子 |
果皮颜包 |
由绿到白
|
果实硬度 |
由硬变软
|
易脱离程度
|
由难到易 |
7 |
梨 |
果皮颜包
|
由绿到黄
|
果实硬度 |
由硬变软
|
果实风味
|
由涩变甜
|
8 |
橙子 |
果皮颜包
|
由绿到橙
|
果实硬度 |
由硬变软
|
果实风味
|
由涩变甜
|
9 |
西瓜 |
果皮颜包
|
由浅绿到深绿绿
|
果实声音 |
由脆到浊 |
表面粗糙程度 |
粗糙到光滑 |
10 |
草莓 |
果皮颜包 |
由绿到红
|
果实硬度
|
由硬变软
|
果实风味
|
由涩变甜
|
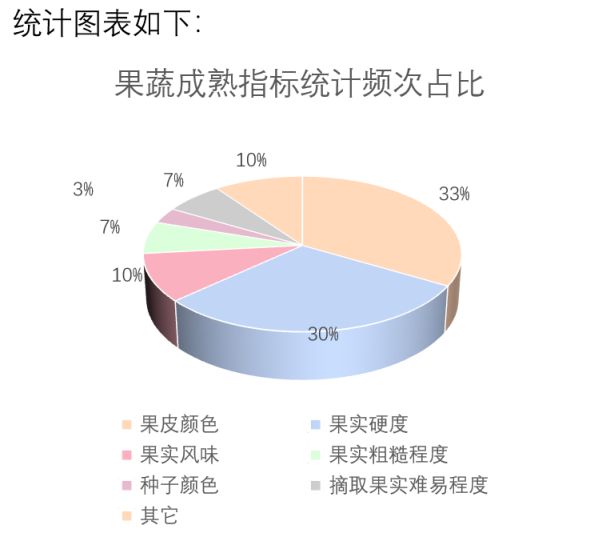
得出结论:果皮颜色,硬度等通常作为判断果实成熟的指标。果实的粗糙程度,易采摘难度也作为判断果实成熟的指标
大部分果实的颜色都是由绿色转为其他颜色,其原因是因为果实未成熟时含有叶绿素较多,还有一些其它色素,但含量相对叶绿素较少,当果实成熟时,叶绿素被破坏,其他颜色就会显现出来。
活动二:不同色光下相同颜色物体反射光差异探究、
实验目的:利用透明塑料纸,得到单色光探究相同颜色的之在不同色光的反射差异。
实验结果
透明玻璃纸颜色 |
光束颜色 |
|
|
|
|
无色透明 |
白色 |
|
|
|
|
红色 |
红色 |
|
|
|
|
绿色 |
绿色 |
|
|
|
|
蓝色 |
蓝色 |
|
|
|
|
色光颜色 |
色纸在不同光下颜色 |
|
|
|
|
|
白纸 |
黑纸 |
红纸 |
绿纸 |
蓝纸 |
红色 |
红色 |
黑色 |
红色 |
黑色 |
深紫色 |
蓝色 |
蓝色 |
黑色 |
紫色 |
深绿色 |
蓝色 |
绿色 |
绿色 |
黑色 |
黑色 |
绿色 |
深绿色 |
白色 |
白色 |
黑色 |
红色 |
绿色 |
蓝色 |
|
|
|
|
|
|
对象 |
白纸 |
黑纸 |
红纸 |
绿纸 |
蓝纸 |
无色透明塑料纸 |
白色 |
黑色 |
红色 |
绿色 |
蓝色 |
红色透明塑料纸 |
红色 |
黑色 |
黑色 |
黑色 |
紫色 |
绿色透明塑料纸 |
绿色 |
黑色 |
黑色 |
绿色 |
深绿色 |
蓝色透明塑料纸 |
蓝色 |
黑色 |
深紫色 |
深绿色 |
蓝色 |
分析·
通过实验得出结论:通过实验可发现,不同色光照射到相同颜色的纸上出现的颜色是不同的,在白纸上,无论哪种颜色的光照上去,都能看见该颜色的光照,这说明白色反射所有色光。在黑纸上无论哪种颜色的光照上去,都能看见黑色,这说明黑色吸收所有光。红绿蓝各种色纸只能反射和它颜色,对其余不同颜色的光都吸收。
活动三:颜色的智能识别一-图像的采集及色彩量化研究
通过活动三 我们了解了颜色智能识别的原理与方法 进一步了解了色彩的构成 且知道了颜色空间的分类及不同颜色空间模型下相关参数的意义
实验目的:通过采集红色和绿色苹果的图片信息并进行信息和数据转化,了解图片色彩构成和空间分类的相关参数
目标物色彩RGB 值数据分析
目标物图片色块目标 |
RGB值 |
规律分析 |
|
95,180,51 |
红色色块中R值远高于G值,绿色色块反之,RGB数值越大颜色越浅 |
|
93,164,36 |
|
|
195,65,55 |
|
|
161,54,47 |

色块目标
|
RGB 值 |
HSL值 |
HEX值 |
HSV值 |
|
95,180,51 |
(99.535,55.844%,45.294%) |
#5fb433 |
(99.535,71.667%,70.588%) |
|
195,65,55 |
(4.286,56%,49.02%) |
#c34137 |
(4.286,71.795%,76.471%) |
|
13,63,251 |
(227.395,96.748%,51.765%) |
#0d3ffb |
(227.395,94.821%,98.431%) |
实验分析:红色色块中R值远高于G值,绿色色块反之,RGB数值越大,颜色越浅,且RGB值之间差值越小,越接近灰色。哪个值越大,就越偏向于哪个颜色,颜色也越鲜艳。
查阅资料
RGB的结构是:rgb(red, green, blue)。值越接近255,就越接近白色,
HSL表示色相(Hue)、饱和度(Saturation)、亮度(Lightness)。结构是:hsl(hue, saturation%, lightness%)。其中饱和度和亮度是百分比,不是数值、
HSV 表达彩色图像的方式由三个部分组成:
Hue(色调、色相)
Saturation(饱和度、色彩纯净度
Value(明度)
HEX和RGB的原理差不多,都是用Red, Green, Blue相混合所产生的颜色,只是换成了十六进制。HEX的格式:# rrggbb。0用a表示,11用b表示,12用c表示,13用d表示,14用e表示,15用f表示。
十六进制数列:1,2,3,4,5,6,7,8,9,a,b,c,d,e,f,10,11,…,aa,ab,ac,…,fc,fd,fe,ff。
活动四:构架光测量电路——基于光敏电阻检测不同色光下红绿物体反射光的光强差异
实验目的:构建光测量电路,基于光敏电阻检测不同光照红绿物体的光强差异
步骤(1)构建光测量电路
(2)测试平台的搭建:在距面包板边缘约4 厘米处(具体距离可根据实际调整,整个实验过程中保持不变)放置一个纸箱将透明红色 LED灯(可先找出红色 LED 灯展开测试)和光敏电阻向一侧弯曲 90,使它们都面向纸箱,剪下一小块黑纸卷成圆筒状,并将其罩在光敏电阻周围,保证只露出光敏电阻正面即可(有助于光敏电阻主要测量反射光,而不是来自其他方向的环境光)。
(3)红光下光敏电阻阻值测定:依次将红色和绿色的纸粘贴固定在距离面包板 4m 处的纸箱侧面,同时通电源,调整红色LED灯和光敏电阻的位置(接下来整个实验过程中保持不变),将万用表拨盘拨转到 2000k,观察阻值显示,如量程太大,可再拨转到 200k,从大到小转变量程,直至显示出合适可读的阻值即可,每种色纸重复测定3次,并记录数据。
(4)不同色光下光敏电阻阻值测定:改变电路中 LED 灯的颜色,重复上述实验步骤,依次测定除红光外其他色光下红绿色纸反射光对应的光敏电阻阻值大小,每种色纸重复测定 3次,并记录数据。
(5)无光下光敏电阻阻值测定:断开电源,测定无光条件下红绿色纸反射光对应的光敏电阻阻值大小作为空白对照,每种色纸重复测定3次,并记录数据
实验变量:自变量光照颜色, 纸张颜色
因变量:光敏电阻感应红绿物体阻值大小差异
实验表格
色光类型 |
纸张颜色 |
光敏电阻感应光强变化阻值大小(单位:kΩ) |
||||
|
|
重复1 |
重复2 |
重复3 |
平均值 |
差值大小 |
红光 |
红色 |
3.5 |
3.6 |
3.4 |
3.5 |
1.06 |
|
绿色 |
4.6 |
4.6 |
4.5 |
4.56 |
|
绿光 |
红色 |
4.3 |
4.3 |
4.3 |
4.3 |
0.5 |
|
绿色 |
3.9 |
3.8 |
4 |
3.9 |
|
黄光 |
红色 |
4.6 |
4.6 |
4.3 |
4.5 |
1 |
|
绿色 |
5 |
5 |
5 |
5 |
|
蓝光 |
红色 |
4 |
4 |
4 |
4 |
0.1 |
|
绿色 |
4.2 |
4.1 |
4 |
4.1 |
|
白光 |
红色 |
4.1 |
4.1 |
4.1 |
4.1 |
0.43 |
|
绿色 |
4.6 |
4.5 |
4.5 |
4.53 |
|
无光 |
红色 |
4.8 |
4.8 |
4.8 |
4.8 |
0.46 |
|
绿色 |
5.1 |
5.2 |
5.2 |
5.26 |
|
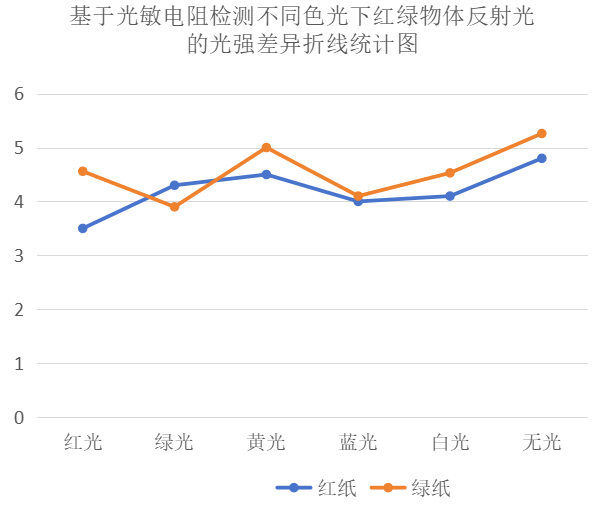
实验结论:
同一色光照射红绿物体时,表面反射光强存在差异 通过上述实验可发现,同一色光照射红绿物体时,表面反射光的光强存在差异,其中红,白颜色表面物体反射光下光敏电阻值较小,黄颜色表面物体反射光下光敏电阻值较大。红色光照射红绿色纸时,两者反射光的光敏电阻阻值差异最大,蓝色光照射红绿色纸时,两者反射光的光敏电阻阻值差异最小,由此可知红,白颜色的色光有利于更好地区分红色和绿色
活动五:智能检测构建区分红色和绿色农产品的功能电路
实验目的:构建区分红色和绿色农产品的功能电路
实验变量:光敏电阻两端的电压大小
实验步骤:步骤:
(1)熟悉相关电子元器件
(2)构建光测量电路
(3)测试平台的搭建:在距面包板边缘约 4 厘米处放置一个纸箱(整个实验过程中纸箱位置保持不变),将合适颜色的透亮LED灯和光敏电阻向一侧弯曲90度,使它们都面向纸箱,剪下一小块黑纸卷成圆状,并将其罩在光敏电阻周围,保证只露出光敏电阻正面即可(有助于光敏电阻主要测量反射光,而不是来自其他方向的环境光)。
(4)电路调试
功能电路调试过程及相关参数记录表格
功能电路调试过程及相关参数记录 |
|||
功能电路状态 |
电源电压 V1 |
光敏电阻分压 |
输出电压V2 |
能区分红和绿苹果(观察红苹果) |
4.27V |
1.74V |
2.53V |
能区分红和绿苹果(观察绿苹果) |
4.27V |
1.55V |
2.72V |
不能区分红和绿苹果 |
4.27V |
4.01V |
0.26V |
能区分红和绿苹果(观察红苹果) |
4.25V |
1.63V |
2.62V |
能区分红和绿苹果(观察绿苹果) |
4.25V |
1.51V |
2.74V |
不能区分红和绿苹果 |
4.25V |
3.95V |
0.30V |
功能电路调试过程及相关参数记录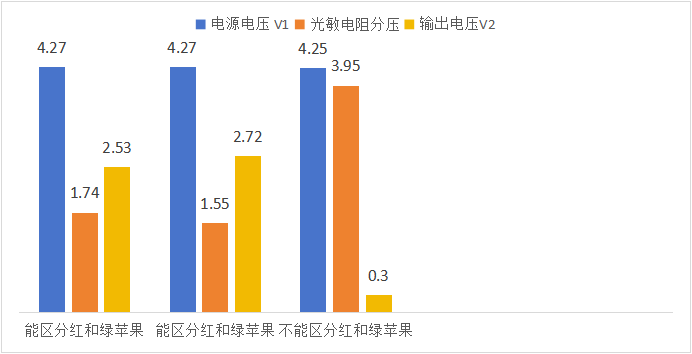
实验结论:由图表可得可以,在光敏电阻分压较低时,可以识别。并且,识别红苹果时,灯亮,识别绿苹果不亮,光敏电阻的电压比识别绿苹果大,而光敏电阻分压较大时,无法识别。
问题的可能原因和影响因素:
1:晶体管方向插反
2:正负极方向接反
3:线路接错
4:光敏电阻分压较大
5. 环境光的明暗
6. 光敏电阻到被测表面的距离。
7. 光敏电阻与被测表面的角度(如果表面与 LED 发出的光垂直,则反射回来的光比与它成锐角时反射回的光更多)
8.  光敏电阻和透明LED的相对位置和方向。
光敏电阻和透明LED的相对位置和方向。
9. 电位器的阻值
实验图片
特色课题:不同天气或时段对果实颜色识别的影响
1探究背景:在做活动五功能电路搭建的时候,环境光是影响实验成功的重要因素之一,有时调整环境光线的强度实验就可以成功。但在统一实验中,并没有考虑这一变量。在长春中国光学科学技术馆发表的文章中,光线强度会影响颜色的明度,而明度的变化会影响色彩纯度,一定程度上会影响机器人对色彩的识别。
2具体实验:(1)改变光线强度拍摄在同一环境中的同一个苹果,研究苹果同一位置的色彩明度变化。
(2)测量同一色相不同明度物体在同一环境下的反射光强差异。
*实验变量:光线强度;色彩明度
(1)不同光线强度同一物体色彩明度变化 |
||||||
|
光线强度 |
|||||
物体颜色 |
弱光 |
正常光 |
强光 |
|||
绿 |
|
33.33% |
|
87.45% |
|
89.02% |
红 |
|
43.92% |
|
84.31% |
|
94.91% |






实验一总结:光线越强,同一物体的明度越大
(2)同一色相不同明度物体反射光差异 |
||||
|
色相/明度 |
|||
光敏电阻阻值大小 (单位:千欧) |
红/88.63% |
红/91.37% |
绿/89.81% |
绿/65.09% |
3次平均值 |
16 |
14 |
11 |
18 |
实验二总结:不同明度同一色系的物体反射光的能力存在差异,明度越大,反射光能力越强,光敏电阻阻值越小;明度越小,反射光能力越弱,光敏电阻阻值越大
整体总结:不同天气或时段(光强不同),对机器人识别颜色有影响,机器人可以先判断当时的光线强度,可通过转化果实颜色的RGB值大小或HSL值的相关参数与相关的比值和标准进行比较来判断是否进行采摘
参考资料:1什么是RGB、HEX、HSL?
2三分钟带你快速学习RGB、HSV和HSL颜色空间
3张长峰,果树采摘机器人的发展现状及运动学分析2013.4.10
4徐世亮,农业采摘机器人设计与研究2014.12.21.02
致谢
能够顺利完成本次毕业论文设计,首先与我们的指导老师赵老师是分不开的,再此,我向赵老师致以深深的谢意!
本次论文设计离不开两位组员的支持,他们以严谨的态度不断提出新的问题,不断修改完善论文细节,也让我在同一个问题上有着更多的,更全面的不同角度的看法。感谢他们为本次课题所花费的时间及精力。他们认真的态度是我本次我所学到的最珍贵的东西。
最后感谢奶茶,拉面,火锅,烤肉在困难时给予我的物质与精神上的支持,你们的支持是我想放弃时最大的慰籍。
