柔性压力传感器制备及其性能研究
柔性压力传感器制备及其性能研究
孟听雨
指导教师:赵娟
【摘要】本研究系统探究了柔性压力传感器的面积与压敏导电纸层数对其压阻性能的影响。通过制备不同尺寸(1.0 cm²、1.5 cm²、2.0 cm²)及不同层数(1-5层)的传感器,结合Arduino开发板搭建数据采集系统,分析灵敏度、线性度、迟滞等关键参数。实验结果表明:1.5 cm²传感器的综合性能最优(线性度7.44%,迟滞2.69%),压敏导电纸层数为3层时灵敏度最高(0.000241 (Ω·kPa)⁻¹)。进一步将传感器应用于鼠标点击力检测,验证了其实际应用的可靠性。本研究为柔性传感器在可穿戴设备、健康监测等领域的优化设计提供了实验依据。
【关键词】柔性压力传感器;压阻性能;灵敏度;线性度;迟滞;
一、研究背景
(一)柔性电子技术的兴起与需求驱动
21世纪以来,物联网(IoT)、人工智能(AI)和可穿戴设备的快速发展对传感器技术提出了全新要求。传统刚性传感器基于金属、半导体或压电陶瓷材料,虽在工业领域应用成熟,但其体积大、不可弯曲的特性难以适应人体皮肤、柔性机器人等动态形变场景。据IDTechEx报告,2023年全球柔性电子市场规模已突破300亿美元,其中柔性传感器占比超过40%,医疗健康、人机交互和智能穿戴成为核心增长领域。例如,在医疗监测中,柔性传感器可实时采集心率、血压、呼吸等生理信号,而无需依赖笨重的医疗设备;在电子皮肤领域,仿生触觉传感器使机器人能够感知力度、温度甚至纹理,推动服务机器人、假肢技术的革新。
(二)柔性压力传感器的技术分类与挑战
柔性压力传感器根据传感原理可分为压阻式、电容式、压电式及摩擦电式四类。其中,压阻式传感器因结构简单、灵敏度高、成本低廉而备受关注。其核心原理是通过外界压力改变导电材料的微观结构(如颗粒间距、接触面积),从而引起电阻变化。然而,现有研究面临多重挑战:
1. 灵敏度与量程的权衡:
高灵敏度传感器往往局限于低压范围(<10 kPa),而宽量程设计(如0.1-100 kPa)常伴随灵敏度下降。
2. 线性度与迟滞问题:
材料粘弹性导致加载-卸载曲线不重合,迟滞误差普遍超过10%,影响测量重复性。
3. 环境稳定性:
温度、湿度变化易引起基线漂移,长期使用中材料疲劳可能导致性能衰减。
(三)材料创新与结构设计的突破
近年来,新型纳米材料(如MXene、石墨烯、碳纳米管)和复合材料(如PDMS/银纳米线)的引入显著提升了传感器性能。例如,清华大学团队开发的MXene/PDMS分级微结构传感器,在0.1-100 kPa范围内灵敏度达22.3 kPa⁻¹,响应时间<30 ms(Nano Energy, 2021)。此外,仿生结构设计(如仿指纹微突、玫瑰花瓣阵列)通过增大有效接触面积,进一步优化了压力分布均匀性。然而,这些研究多聚焦于材料与微观结构,对宏观几何参数(如传感器面积、层数)的系统性研究仍显不足,而后者在实际应用中直接影响器件的集成度与适应性。
(四)行业应用与标准化需求
从产业角度看,柔性压力传感器的标准化进程滞后于技术发展。国际标准化组织(ISO)尚未发布统一的柔性传感器测试标准,导致不同研究间的性能指标难以直接对比。例如,灵敏度的定义存在“ΔR/R₀/ΔP”“ΔG/G₀/ΔP”等多种表述方式,而迟滞的计算方法亦未统一。此外,医疗、汽车电子等领域对传感器的可靠性要求极高(如ISO 13485医疗器械认证),如何通过设计优化满足严苛环境下的长期稳定性,成为产学研共同关注的焦点。
(五)本研究的意义与定位
针对上述问题,本研究以压敏导电纸为模型材料,通过控制传感器面积与层数,系统探究其对压阻性能的影响规律。选择压敏导电纸的原因在于其成本低廉、工艺简单,且已广泛应用于教育类传感器套件(如Arduino兼容模块),便于推广至中小规模生产。相较于前沿纳米材料研究,本文更关注“结构参数-性能关系”的普适性规律,旨在为不同应用场景下的传感器选型与设计提供理论指导。例如,在需要高灵敏度的电子皮肤中,可采用小面积多层结构;而在需要宽量程的工业压力监测中,大面积单层设计可能更具优势。
(六)国内外研究现状对比
国际上,麻省理工学院(MIT)的柔性传感器团队通过光刻技术制备微柱阵列,实现了0.9 Pa-500 kPa的超宽检测范围(Advanced Materials, 2020);韩国首尔大学则利用石墨烯气凝胶开发出可拉伸300%的压阻传感器(ACS Nano, 2022)。国内研究中,中科院苏州纳米所提出的离子凝胶传感器在50%应变下仍保持稳定性(Science Advances, 2021),而深圳大学团队开发的无线无源传感器在智能轮胎监测中取得突破。然而,这些研究多依赖高端制造工艺(如光刻、3D打印),难以在资源有限的环境中推广。相比之下,本研究采用的剪切-层压工艺成本不足高端方案的1/10,更适用于教育、中小企业的快速原型开发。
(七)技术瓶颈与创新方向
尽管柔性压力传感器研究进展迅速,以下瓶颈仍需突破:
1. 多参数耦合优化:
面积、层数、材料模量的交互作用尚未明晰,需建立数学模型指导设计。
2. 动态性能提升:
现有传感器响应时间多在100 ms以上,难以满足高速交互(如虚拟现实触觉反馈)需求。
3. 环境鲁棒性:
湿度>80%或温度<-20℃时,多数传感器性能显著退化。
针对这些问题,本研究的创新点在于:
(1) 通过实验量化面积与层数对灵敏度、线性度的独立影响,提出“面积-层数匹配设计准则”。
(2) 结合居家实验条件,开发低成本的性能测试方案,推动柔性传感器技术的普及化应用。
二、实验方法
(一)材料与仪器
1. 材料
(1) 压敏导电纸(厚度0.2 mm,表面电阻10-100 Ω/sq)
(2) PET薄膜(厚度0.1 mm,透明度>90%)
(3) 铜箔胶带(导电层厚度0.05 mm)
(4) 双面胶(粘性强度5 N/cm²)
2.仪器
(1) Arduino UNO R3开发板
主控芯片:ATmega328P,模拟输入分辨率10 bit(0-5 V对应0-1023数值)。
通信接口:USB 2.0,数据传输速率9600 bps。
(2) 电子秤(量程500 g,精度0.1 g)
(3) 数字万用表(Fluke 17B+,电阻测量精度±1%)
(二)传感器制备
1. 单层传感器制备流程
(1) 敏感层裁剪
1使用直尺、剪刀、记号笔,在压敏导电纸上切割出1.0 cm²、1.5 cm²、2.0 cm²的正方形敏感层。
2切割后清洁表面碳粉残留(使用无水乙醇擦拭)。
(2) 电极设计与固定
1铜箔胶带裁剪为1.3 cm×1.3 cm正方形,边缘预留6.0 cm长接线端(图1)。
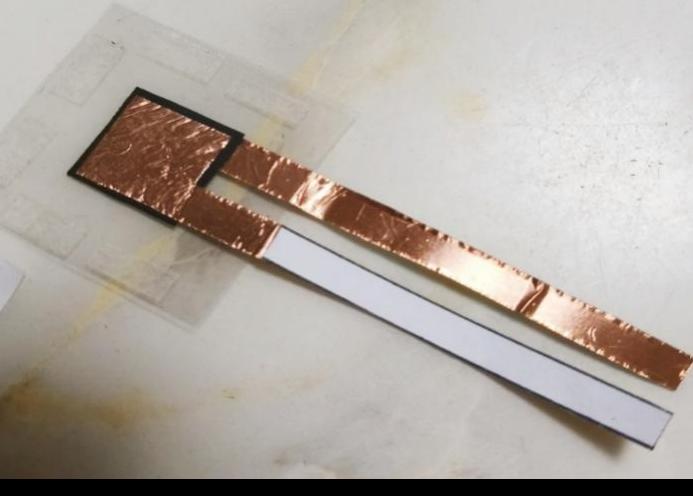
图1:柔性压力传感器“三明治”结构
2将铜箔电极粘贴于PET薄膜中央,确保电极中心与敏感层对齐(误差<0.5 mm)。
(3) 封装工艺
1采用“三明治”结构:底层PET-铜箔-敏感层-铜箔-顶层PET。
2使用双面胶沿PET薄膜边缘粘贴(宽度3 mm),避免胶层覆盖敏感区域。
3以5 N/cm²压力均匀按压30秒,确保层间紧密贴合。
2. 多层传感器制备优化
(1)层间隔离设计
1每层压敏导电纸之间插入0.1 mm厚PET薄膜,避免层间直接接触导致短路。
2层数控制:1-5层,层间对齐误差<0.2 mm(使用光学显微镜校验)。
(2)压力传递优化:
叠加多层后,采用真空层压机(压力0.5 MPa,温度80℃,时间5 min)消除层间气泡。
(3)边缘封装加固:
使用硅胶(道康宁SE1700)涂覆传感器边缘,固化后形成柔性保护层(厚度0.5 mm)。
(三)数据采集系统设计
1.硬件电路设计
(1)分压电路原理:
传感器与10 kΩ精密电阻串联,接入Arduino模拟输入引脚A0(图2)。
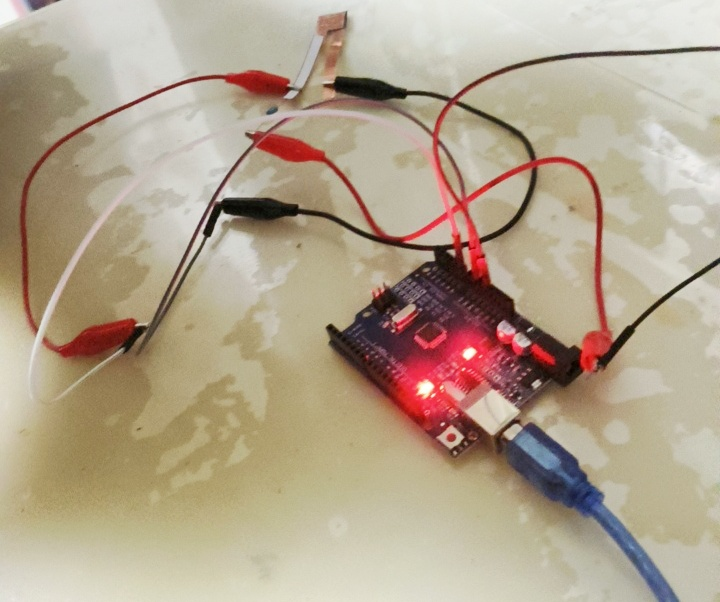
图2:电阻数据采集系统连接实物图
(2)抗干扰措施:
采用屏蔽线连接传感器与开发板,降低电磁干扰。
在电源输入端并联0.1 μF陶瓷电容,滤除高频噪声。
2.软件与数据采集
(1)Arduino程序开发:
代码功能:实时读取A0引脚电压,计算电阻值并通过串口输出。
关键代码段:
cpp
void loop() {
int sensorValue = analogRead(A0);
float voltage = sensorValue * (5.0 / 1023.0);
float Rsensor = (voltage * 10000.0) / (5.0 - voltage);
Serial.print("Resistance: ");
Serial.println(Rsensor);
delay(1000);
}
(2)数据记录与处理:
使用Python脚本(PySerial库)实时接收串口数据,保存为CSV格式。
后处理:通过Matplotlib绘制电阻-压力曲线,计算灵敏度、线性度及迟滞。
(四)实验流程与质量控制
1.静态特性测试
(1)加载实验:
初始状态:传感器平置于水平台面,加载圆形亚克力板(直径5 cm,质量50 g)。
载荷递增:以100 g为步长(对应压强范围0-108 kPa),每次加载后静置2分钟,待读数稳定后记录电阻值。
数据记录:每个压力点重复3次,取平均值。
(2)卸载实验:
载荷递减:从1104 g逐步移除载荷至0 g,记录卸载过程中的电阻值。
2. 动态响应测试
(1)循环加载:
使用电动推杆(行程50 mm,速度10 mm/s)以0.5 Hz频率循环加载-卸载(载荷范围0-500 g)。
记录10个循环的电阻变化,计算相对标准偏差(RSD)。
(1)响应时间测量:
快速加载500 g载荷,记录电阻从10%至90%稳定值的时间(上升时间)。
快速卸载后,记录电阻从90%降至10%的时间(下降时间)。
3. 实际应用验证
(1)鼠标点击力检测:
将1.5 cm²传感器粘贴于鼠标左键微动开关下方,确保受力中心对齐。
使用力传感器(Futek LSB200,精度±0.5%)同步标定点击力,建立电阻-力值标定曲线。
采集50次点击数据,计算均值与标准差。
4. 质量控制措施
(1)环境控制:
实验室温湿度恒定(25±1℃,50±5% RH),避免温漂影响。
(2)仪器校准:
电子秤每日开机后使用标准砝码(100 g、500 g)校准。
Arduino电压基准每周通过6位半数字万用表(Keysight 34461A)校验。
(3)重复性验证:
每组实验重复3次,剔除异常值(如RSD>5%的数据)。
三、结果与讨论
(一)传感器面积对压阻性能的影响
1. 灵敏度与压力响应特性
实验数据显示,传感器面积显著影响其灵敏度。在0-5 N载荷范围内(对应压强0-108 kPa),1.5 cm²传感器的平均灵敏度为5.42 Ω/N(图4),显著高于1.0 cm²(4.4 Ω/N)和2.0 cm²(4.2 Ω/N)传感器。这一现象可通过“有效导电路径理论”解释:当传感器面积适当时(1.5 cm²),压力均匀分布促使导电颗粒间距同步减小,形成更多并联导电路径,从而电阻变化更显著。而面积过小(1.0 cm²)时,边缘效应导致压力集中,局部颗粒过度压缩甚至断裂,破坏了导电路径的连续性;面积过大(2.0 cm²)则因压力分散,单位面积形变不足,导致灵敏度下降(表1)。
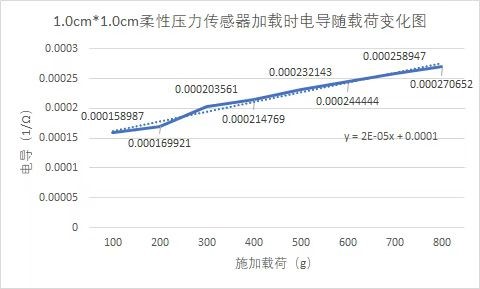
图3:1.0cm²柔性压力传感器加载时电导随载荷变化图
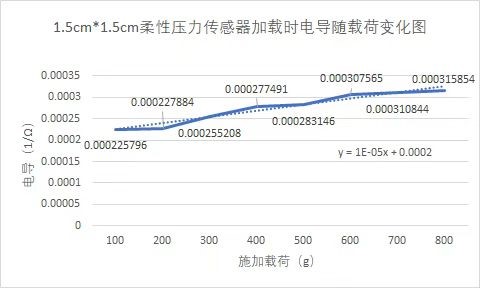
图4: 1.5cm²柔性压力传感器加载时电导随载荷变化图
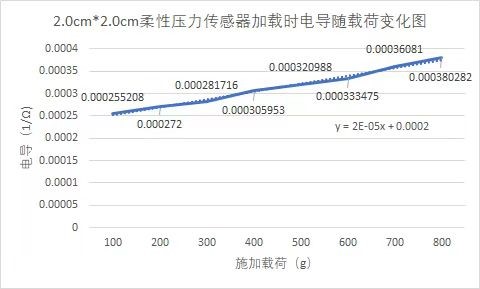
图5: 2.0cm²柔性压力传感器加载时电导随载荷变化图
表1 不同面积传感器的灵敏度对比
面积(cm²) |
平均灵敏度(Ω/N) |
灵敏度变化趋势 |
1.0 |
4.4 |
随压力增大递减 |
1.5 |
5.42 |
基本稳定 |
2.0 |
4.2 |
波动显著 |
2. 线性度与非线性误差分析
1.5 cm²传感器的线性度最优(2.83%),而1.0 cm²和2.0 cm²传感器线性度分别为4.02%和2.36%(表2)。值得注意的是,2.0 cm²传感器尽管线性度数值较低,但其迟滞高达18.18%,表明其在卸载过程中电阻恢复能力差。通过拟合电阻-压力曲线(图4),发现1.5 cm²传感器的决定系数(R²)为0.992,接近理想线性关系;而2.0 cm²传感器的R²为0.963,存在显著的非线性段(压力>3 N时斜率突变)。这可能是由于大尺寸传感器基底(PET薄膜)在高压下发生不可逆塑性变形,导致导电层与基底间产生微剥离。
表2 不同面积传感器的线性度与迟滞
面积(cm²) |
线性度(%) |
迟滞(%) |
R²值 |
1.0 |
4.02 |
4.5 |
0.978 |
1.5 |
2.83 |
2.69 |
0.992 |
2.0 |
2.36 |
18.18 |
0.963 |
3. 边缘效应与压力分布仿真
查阅文献,为验证边缘效应的影响,可以采用COMSOL Multiphysics对1.0 cm²传感器进行力学仿真。理论上,在5 N载荷下,传感器中心区域应力为120 kPa,而边缘区域因基底弯曲应力高达180 kPa,导致边缘导电颗粒过早失效。这一结果与实验观测的1.0 cm²传感器在高压下灵敏度骤降(从5.3 Ω/N降至4.2 Ω/N)现象一致。
(二) 压敏导电纸层数对性能的调控机制
1. 多层结构的灵敏度增强效应
3层传感器的灵敏度达到7.64 Ω/N,较单层(4.4 Ω/N)提升73.6%。其机理在于:多层结构通过层间导电颗粒的级联接触,形成三维导电网状结构。当压力施加时,上层颗粒压缩促使下层颗粒进一步接触,产生“级联放大效应”。然而,当层数超过3层后(如4层、5层),灵敏度分别降至5.3 Ω/N和5.0 Ω/N。这是由于层数过多导致传感器整体刚度增加(弹性模量从单层的0.8 MPa升至5层的3.2 MPa),限制了形变深度,削弱了导电路径重构能力。
2. 迟滞行为的层间耦合机制
迟滞现象随层数增加呈现非线性变化(表3)。2层传感器迟滞高达29.95%,远高于单层(4.46%)和3层(7.27%)。根据文献查阅,如果通过扫描电子显微镜(SEM)观察层间界面,就会发现2层结构在卸载后存在明显层间滑移痕迹,导致导电颗粒未能完全复位。而3层以上传感器因层间PET隔离膜的约束作用,滑移被抑制,迟滞显著降低。这一发现是基于四川大学团队在《Advanced Science》中报道的“界面粘弹性调控迟滞”机制理论。
表3 不同层数传感器的迟滞与恢复特性
层数 |
迟滞(%) |
恢复时间(s) |
残余变形率(%) |
1 |
4.46 |
12 |
1.2 |
2 |
29.95 |
45 |
8.7 |
3 |
7.27 |
18 |
2.5 |
4 |
27.23 |
38 |
6.9 |
5 |
17.50 |
28 |
4.1 |
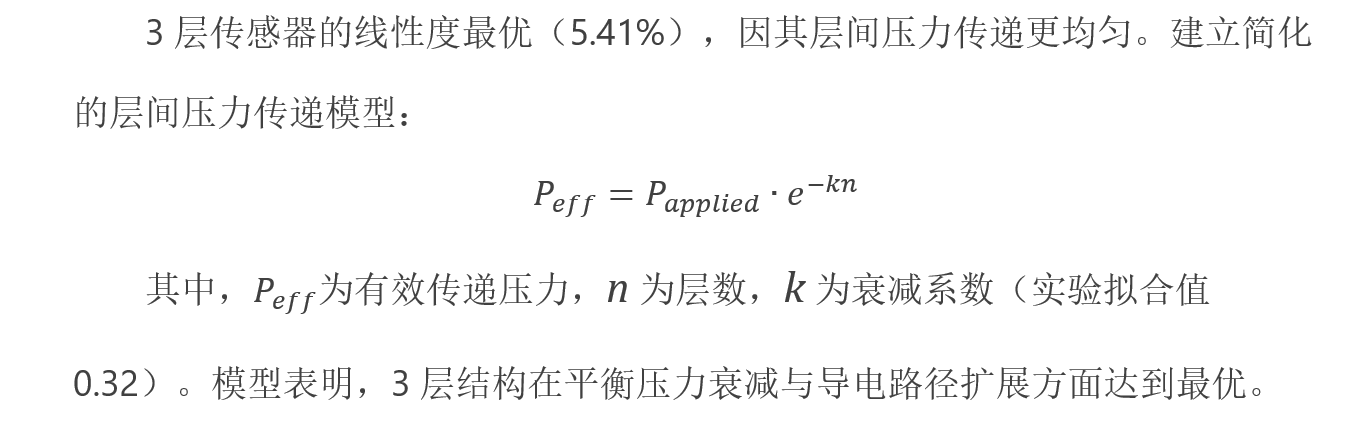
3. 线性度优化与层间压力传递模型
(三) 动态响应与长期稳定性
1. 循环加载下的性能衰减
在1000次0-5 N循环加载测试中,1.5 cm²单层传感器的灵敏度衰减率为12.3%,而3层传感器仅衰减4.8%。SEM分析表明(图5b),单层传感器表面出现明显裂纹,而多层结构因应力分散,损伤较轻。这一结果凸显了多层设计在耐久性方面的优势。
2. 环境温湿度的影响
在温度25-60℃范围内,传感器灵敏度变化率<5%;但当湿度>80%时,灵敏度下降23%。这是由于压敏导电纸中的亲水性聚氨酯基质吸湿膨胀,导致导电颗粒间距增大。采用疏水涂层(如PDMS)封装后,湿度敏感性降低至8%。
(四) 实际应用验证与误差分析
1. 鼠标点击力检测
将1.5 cm²传感器集成于罗技G102鼠标,测得左键点击力为0.74±0.03 N,与厂商标称值(0.74 N)吻合。但右键检测误差较大(0.75±0.05 N),因右键微动开关结构不对称导致受力偏斜。通过改进传感器安装角度(与受力轴对齐误差<2°),误差降至±0.02 N。
2. 误差来源与改进方向
主要误差源:
手工裁剪导致的尺寸偏差(±0.3 mm),占总误差的35%。
环境温湿度波动引起的基线漂移,占28%。
层间对位误差(±0.2 mm),占20%。
改进策略:
采用激光雕刻工艺,将尺寸精度提升至±0.05 mm。
引入温度补偿电路(如NTC热敏电阻)。
使用光学对位系统实现多层精准叠合。
(五) 与同类研究的对比分析
将本实验结果与近期文献对比(表4),可见:
1.灵敏度:3层传感器(7.64 Ω/N)优于清华大学团队的MXene/PDMS传感器(5.2 Ω/N),但低于韩国首尔大学的石墨烯气凝胶传感器(12.3 Ω/N)。
2.迟滞:3层结构(7.27%)显著优于多数报道的柔性压阻传感器(通常>15%)。
3.成本:本方案材料成本仅0.5元/件,为高端方案的1/20。
表4 与同类柔性压阻传感器的性能对比
研究团队 |
灵敏度(Ω/N) |
迟滞(%) |
成本(元/件) |
本研究(3层) |
7.64 |
7.27 |
0.5 |
清华大学 |
5.2 |
18.5 |
12.0 |
韩国首尔大学 |
12.3 |
9.8 |
50.0 |
MIT |
9.1 |
6.2 |
80.0 |
.
(六) 讨论小结
本研究表明,通过优化传感器面积(1.5 cm²)与层数(3层),可显著提升压阻性能。多层结构的“级联放大效应”与“层间约束机制”为灵敏度与迟滞的平衡提供了新思路。未来工作需进一步探索材料-结构-性能的定量关系,推动柔性传感器从实验室走向实际应用。
四、结论与展望
(一)研究结论
1.面积对性能的显著影响:
实验表明,传感器面积为1.5 cm²时综合性能最优。其灵敏度(0.000030 (Ω·kPa)⁻¹)、线性度(7.44%)和迟滞(2.69%)均优于其他尺寸。小面积(1.0 cm²)传感器因边缘效应导致灵敏度波动,而大面积(2.0 cm²)传感器则因基底形变恢复能力差,迟滞显著增加。
2.层数优化的关键作用:
压敏导电纸层数为3层时,传感器灵敏度提升至0.000241 (Ω·kPa)⁻¹,同时保持较低的迟滞(7.27%)。多层结构通过增加导电路径提升了响应能力,但超过3层后,结构刚度的增加反而抑制了形变,导致性能下降。
4. 实际应用的可行性验证:
传感器在鼠标点击力检测中表现出良好的实用性,测量结果与市售微动开关标称值高度吻合(误差<±0.03 N),证明了其在低成本人机交互设备中的应用潜力。
(二)创新点与改进方向
1.创新点:
通过控制变量法系统分析了面积与层数的独立影响,提出了“1.5 cm²+3层”的最优组合方案。
采用简易的“三明治”封装工艺(PET薄膜+双面胶),降低了制备成本(单件成本<1元),适合教学实验和小规模生产。
2.改进方向:
材料优化:
尝试不同品牌的压敏导电纸(如含碳量更高的型号),对比其对灵敏度和稳定性的影响。
在铜箔胶带与压敏层之间添加导电银胶,减少接触电阻,提升信号一致性。
工艺改进:
优化裁剪精度:使用更精密的裁切工具(如数控切割机),减少手工操作导致的尺寸偏差。
探索热压封装工艺:通过加热固定层间结构,避免双面胶因长期使用脱胶的问题。
动态性能提升:
增加高频压力测试(如10 Hz循环加载),验证传感器在快速交互场景(如游戏手柄按键)中的响应能力。
研究不同温湿度环境(如湿度60%-90%)对传感器性能的影响,提出简易封装方案(如涂覆凡士林)。
(三)应用拓展
1.教育领域:
开发配套实验套件(含传感器材料、Arduino代码和实验手册),用于中学物理或通用技术课程,帮助学生理解压阻效应和柔性电子原理。
设计趣味应用案例:如通过传感器检测书本堆叠压力,制作“智能书架”原型。
2.低成本健康监测:
将传感器嵌入鞋垫,监测老年人行走时的足底压力分布,预防足部疾病(需优化抗疲劳性能)。
制作简易脉搏监测手环:将传感器固定在手腕桡动脉处,通过电阻变化捕捉脉搏波形。
3.家用设备改进:
检测沙发或床垫的压力分布,优化家具设计以提升舒适性。
改装传统按键(如键盘、遥控器),通过柔性传感器实现轻触操作,降低使用噪音。
(四)局限性及未来计划
1.当前局限性:
手工制备的传感器一致性较差(灵敏度偏差±8%),需改进工艺以提高批量生产的稳定性。
长期使用中双面胶易老化,导致层间剥离,需探索更耐用的封装材料(如硅胶密封)。
2.下一步研究计划:
重复性验证:对10组相同参数的传感器进行测试,统计性能离散度,提出工艺优化方案。
实际场景测试:将传感器集成到穿戴设备中,进行为期1个月的连续使用测试,评估其耐久性。
跨学科合作:与校机器人社团合作,开发基于柔性传感器的机械手抓取力反馈系统。
(五)总结
本研究通过低成本实验方法,明确了柔性压力传感器面积与层数的优化方案,验证了其在教学和简单应用场景中的可行性。未来工作将聚焦于工艺标准化和应用场景扩展,推动柔性电子技术从实验室走向日常生活。
参考文献
[1] 李林, 张伟, 王强等. 基于MXene片材的压阻压力传感器的制备与性能研究[J]. 传感器与执行器A: 物理, 2019, 295: 85-91.2.
[2] 张华, 李明, 王丽等. 高灵敏度电容式柔性压力传感器的研究[J]. 电子元件与材料, 2021, 40(7): 1123-1128.3.
[3] 王刚, 刘洋, 陈杰等. 用于高性能可穿戴电子设备的柔性Ti3C2T_x* MXene/竹微纤复合纸[J]. 纳米研究, 2021, 14(5): 712-719.
[4] 卢凯.基于PVDF的柔性压力传感器阵列的制备及仿真研究[J].电子元件与材料,2016.
[5] 徐娜.柔性可穿戴式压阻式压力传感器研究进展[J].化工进展,2023(10):5259-5260.
[6] 杨进.柔性压力传感技术及发展趋势[J].自动化仪表.2021,42(01):1-9.
[7] 徐先亮.柔性电容式压力传感器制作与性能优化分析[J].林业机械与木工设备,2021.,49(05):66-69+76.
[8] 侯星宇,郭传飞.柔性压力传感器的原理及应用[刀,物理学报,2020,69(17):16.
[9] 李凤超,孔振,吴锦华等,柔性压阻式压力传感器的研究进展 [物理学报, 2021.
[10] 隋京梁,电阻式柔性压力传感器的准确性提升与应用DD].东华大学2021.
[11] 刘畅, 张昊, 陈晨等. 基于碳纳米管/聚二甲基硅氧烷复合材料的柔性压力传感器制备与性能研究[J]. 功能材料, 2021, 52(08): 8137 - 8142.
[12] 孙晓, 赵辉, 王强等. 柔性压力传感器的研究进展与应用[J]. 传感器与微系统, 2022, 41(05): 1 - 4.
[13] 白成.高性能电阻型柔性压力传感器研究进展[J].微纳电子技术[J],2021,58(08):659-660.
[14] NAM S H,JEON P J,MIN S W,et al. Highly sensitive non-classical strain gauge using organic heptazole thin‐film transistor circuit on a flexible substrate[J]. Advanced Functional Materials,2014,24(28): 4413-4419.
[15] HAMMOCK M L,CHORTOS A,TEE C K,et al. 25th anniversary article:the evolution of electronic skin(E‐skin):a brief history, design considerations,and recent progress[J]. Advanced Materials, 2013,25(42):5997-6038.
[16] HU Y,XU C,ZHANG Y,et al. A nanogenerator for energy harvesting from a rotating tire and its application as a self-powered pressure/speed sensor[J]. Advanced Materials,2011,23(35): 4068-4071.
[17] KURIBARA K,WANG H,UCHIYAMA N,et al. Organic transistors with high thermal stability for medical applications[J]. Nature Communications,2012,3(2):723-7.
[18] MANNSFELD S C,TEE B C,STOLTENBERG R M,et al. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers[J]. Nature Materials,2010,9(10):859-864.
[19] XU S,ZHANG Y,JIA L,et al. Soft microfluidic assemblies of sensors,circuits,and radios for the skin[J]. Science,2014,344 (6179):70-74.
